

Xmove mode pose variable name till signal number
Назначение
Движение робота вперед к заданной позиции по линейной траектории, если в момент движения возникает заданное сигнальное состояние, движение в данную точку прерывается и происходит переход к следующему шагу программы.
Параметр
1.Режим
Контролирует нарастающий или убывающий фронт заданного входного сигнала. Положительное сигнальное число контролирует нарастающий фронт, отрицательное число – убывающий.
/ERR (опция)
указывает ошибочное состояние, если сигнальное условие было установлено до начала движения
/LVL (опция)
немедленно переходит на следующий шаг, если сигнальное условие было установлено до начала движения.
2.Имя позиции
Задает конечную цель движения робота.
3.Номер сигнала
Задает номер внешнего входного сигнала или внутреннего сигнала.
Внешние входные сигналы – 1001 до реально смонтированного сигнала
Внутренние сигналы – 2001 - 2256
(ПРИМЕЧАНИЕ)
При контролировании нарастающего, понижающего фронтов сигнала, произойдет скачок только тогда, когда произойдет изменение сигнального состояния. Поэтому, если контролируется нарастающий фронт сигнала, и сигнал находится в состоянии ON во время выполнения инструкции XMOVE, программа не будет прервана до тех пор, пока сигнал не примет состояние OFF, а затем снова состояние ON. Входной сигнал должен быть устойчив в течение 50 мсек для точного контролирования.
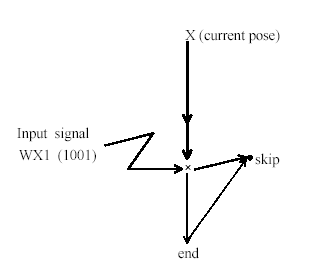
Пример
XMOVE end TILL 1001
LMOVE skip
Движение из текущей позиции в позицию “end” по линейной траектории. Как только входной сигнал 1001 становится ON, программное выполнение переходит к следующему шагу, даже если робот не достиг позиции “end”.
C1MOVE pose variable name, clamp number
C2MOVE pose variable name, clamp number
Назначение
Движение в заданную позицию по круговой траектории.
Параметр
1.Имя позиции
Задает координату точки, в которую должен выйти робот, под определенным именем.
Для того чтобы совершить круговое движение необходимо задать три обученных точки. Эти три точки различаются для инструкций C1MOVE и C2MOVE.
. Номер фиксатора
Определяет номер фиксатора, чтобы открыться или закрыться в при достижении координаты. Положительный номер закрывает фиксатор, и отрицательный номер открывает его. Любой номер фиксатора может быть установлен в максимально установленный номер через команду HSETCLAMP (или вспомогательную функцию 0605). Если опущено, фиксатор не открывается и не закрывается.
Пояснение
C1MOVE инструкция должна находиться посредине между двумя инструкциями движения. C2MOVE завершает движение по круговому типу.
C1MOVE
1.Обученная точка начала движения (может быть любой инструкцией движения)
2.Обученная точка, задаваемая как параметр данной инструкции
3.Обученная точка следующего движения (задается как параметр только для C1MOVE или C2MOVE инструкций)
C2MOVE
1.Точка, задаваемая как параметр в последней C1MOVE инструкции
2.Точка, задаваемая как параметр до выполнения последней C1MOVE инструкции
3.Точка, задаваемая как параметр C2MOVE инструкции, т.е. окончание круговой интерполяции
(ПРИМЕЧАНИЕ)
Следующие инструкции движения должны использоваться перед инструкцией C1MOVE:
ALIGN, C1MOVE, C2MOVE, DELAY, DRAW, TDRAW, DRIVE, HOME,
JMOVE, JAPPRO, JDEPART, LMOVE, LAPPRO, LDEPART, STABLE,
XMOVE
C1MOVE инструкция должна следовать за C1MOVE или C2MOVE инструкцией.
C1MOVE инструкция должна быть раньше C2MOVE инструкции


