

6.0 Программные инструкции
6.0 Программные инструкции
6.1 Инструкции движения
6.2 Инструкции управления скоростью и точностью
6.3 Инструкции управления фиксаторами
6.4 Инструкции конфигурации
6.5 Инструкции управления
6.6 Инструкции программных структур
6.7 Инструкции бинарных сигналов
6.8 Инструкции управления сообщениями
6.9 Инструкции позиционной информации
6.10 Инструкции управления программой и данными
Ключевое слово параметры
Параметр, выделенный цветом, может быть опущен. Всегда вводите пробел между ключевым словом и параметрами
↵ в примерах представляет клавишу Enter.
6.1.Инструкции движения
JMOVE Перемещает робот в интерполированном угловом движении.
LMOVE Перемещает робот в интерполированном прямолинейном движении
DELAY Останавливает движение робота на определенное время.
STABLE Останавливает движение робота на определенное время после совмещения осей.
JAPPRO Приближается к координате в интерполированном угловом движении.
LAPPRO Приближается к координате в интерполированном прямолинейном движении.
JDEPART Отходит от текущей позиции в интерполированном угловом движении.
LDEPART Отходит от текущей позиции в интерполированном прямолинейном движении.
.
HOME Перемещается в позицию home.
DRIVE Перемещается в направлении одной оси
DRAW Перемещается на заданное расстояние в направлении X, Y, Z, осей базовой системы координат.
TDRAW Перемещается на заданное расстояние в направлении X, Y, Z, осей инструментальной системы координат.
ALIGN Располагает параллельно ось Z инструментальной системы координат с ближайшей осью базовой системы координат.
HMOVE Перемещает робот в интерполированном прямолинейном движении (суставы запястья двигаются в интерполированном угловом движении)
XMOVE Перемещается по прямолинейной траектории в заданную позицию.
C1MOVE Перемещение с круговой интерполяцией
C2MOVE Перемещение с круговой интерполяцией
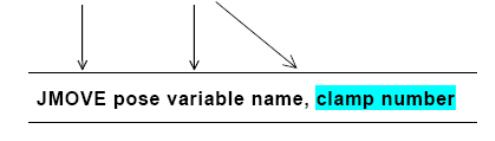
JMOVE pose variable name, clamp number
LMOVE pose variable name, clamp number
Назначение
Перемещение робота в заданную позицию, с интерполированным угловым или прямолинейным движением
Параметры
1. Имя координаты (может быть задана в декартовых координатах, в угловых координатах, в сложных точках или функциями позиций)
2. Номер зажима
Определяет номер зажима для открытия или закрытия в точке назначения. Положительное число закрывает зажим, отрицательное – открывает. Любой номер фиксатора может быть установлен до максимума установкой номера через команду HSETCLAMP (или вспомогательную функцию 0605). Если опущено, фиксатор не открывается или не закрывается.
Пояснение
Робот перемещается по интерполированной криволинейной траектории, когда выполняется команда JMOVE. Робот перемещается так, чтобы соотношения между пройденным расстоянием и полным расстоянием, были одинаковы для всех суставов через все движение от начала позиции до конца позиции.
Робот перемещается в прямолинейном интерполированном движении, когда выполняется команда LMOVE. Начало инструментальной системы координат (TCP) движется по прямолинейной траектории.

DELAY time
Назначение
Задерживает движение робота на заданное время. Понимается как задание нулевой скорости.
Параметр
Время
Задает время в секундах.
Пояснение
В AS системе, DELAY инструкция понимается как инструкция движения, т.е. “движение в никуда”.
Даже если робот останавливается при помощи данной инструкции, выполнение программных шагов продолжается до следующей инструкции движения.
.
![]()
STABLE time
Назначение
Задерживает выполнение следующих инструкций движения до истечения промежутка времени после совмещения осей. (Ожидает до тех пор, пока робот полностью не остановится)
Если для совмещения осей не хватает времени заданного в этой инструкции, робот останавливается и время вычисляется, когда оси совместятся снова.
Параметр
Задает время в секундах для останова движения.
Пояснение
Если совмещение осей не произошло, когда робот был остановлен этой инструкцией, время вычисляется, когда оси совместятся снова.
JAPPRO pose variable name, distance
LAPPRO pose variable name, distance
Назначение
Двигается по оси Z инструментальной системы координат, не доходя определенного расстояния до обученной точки. Движение происходит JAPPRO по криволинейной траектории, LAPPRO по прямолинейной траектории.
Параметр
1.Имя координаты
Задает точку назначения в декартовых или угловых значениях.
2.Расстояние
Задает расстояние между обученной точкой и положением в пространстве, которое достигает робот, двигаясь по оси Z инструментальной системы координат и не доходя до обученной точки на заданное расстояние. Если расстояние задано положительным числом, робот перемещается в отрицательном направлении оси Z, если отрицательным – перемещается в положительном направлении оси Z.
Пояснение
В этих командах, положение инструмента устанавливается в положении указанной позиции, и позиция установлена на указанном расстоянии от заданной позиции в направлении оси Z инструментальной системы координат.
 Перемещает
робот в точку, находящуюся над точкой
place,
заданную как декартовая координата, на
расстоянии 100 мм, по направлению оси Z
инструментальной системы координат
Перемещает
робот в точку, находящуюся над точкой
place,
заданную как декартовая координата, на
расстоянии 100 мм, по направлению оси Z
инструментальной системы координат
JDEPART distance
LDEPART distance
Назначение
Отходит от данной точки по оси Z инструментальной системы координат на определенное расстояние. Движение может быть криволинейным или прямолинейным
Параметр
Задает расстояние в миллиметрах между текущей позицией и позицией, расположенной на оси Z инструментальной системы координат, куда робот должен выйти. Если заданное расстояние положительное значение, робот движется по отрицательному направлению оси Z. Если заданное расстояние отрицательное значение, робот движется по положительному направлению оси Z.
HOME home position number
Назначение
Движется по криволинейной траектории в точку, имя координаты которой названы как HOME или НОМЕ2.
Параметр
Номер положения HOME
Задается числами 1 или 2. Если параметр не задан, выбирается НОМЕ 1.
Пояснение
Могут быть заданы две домашних позиции (позиции безопасности) (HOME1 и HOME2). Эта команда перемещает робот в одну из домашних позиций в интерполированном угловом движении. Домашняя позиция должна быть определена заранее, используя команды SETHOME или SET2HOME. Если домашняя позиция - не
определена, нулевое начало координат (все суставы в 0 °) принято как домашняя позиция.

DRIVE joint number, displacement, speed
Назначение
Движение определенного сустава робота.
Параметры
1.Номер сустава
Задает номер сустава, для выполнения движения, в зависимости от конфигурации робота.
2.Смещение
Задает угол поворота для выполнения движения заданного сустава в положительных или отрицательных значениях. Единицы измерения для этой величины такие же, как и описывающие положение сустава. Если необходимо совершить вращательное движение, значение задается в градусах, если поступательное – в миллиметрах.
3.Скорость
Задает скорость перемещения. Как при задании обычной программной скорости, она задается в процентах от мониторной скорости. Если параметр не задан, устанавливается 100% мониторная скорость.
Пояснение
Эта инструкция двигает только один заданный сустав. Скорость движения для этой инструкции есть комбинация скорости, заданной в этой инструкции и мониторной скорости. Программная скорость, установленная в программе не эффективна для этой инструкции.
![]()
Поворачивает 2 сустав на -10 градусов со скоростью 75% от 100 % мониторной скорости
DRAW X translation, Y translation, Z translation, X rotation, Y rotation, Z rotation, speed
TDRAW X translation, Y translation, Z translation, X rotation, Y rotation, Z rotation, speed
Назначение
Движение робота по прямолинейной траектории с заданной скоростью по осям координат X,Y,Z в декартовой системе координат (DRAW), вращение на заданное количество вокруг каждой из осей. TDRAW инструкция движения робота в инструментальной системе координат.
Параметр
Х перемещение. Задает движение по оси Х соответствующей системы координат в миллиметрах. Если параметр не задан, вводится нулевое перемещение.
Y перемещение. Задает движение по оси Y соответствующей системы координат в миллиметрах. Если параметр не задан, вводится нулевое перемещение.
Z перемещение. Задает движение по оси Z соответствующей системы координат в миллиметрах. Если параметр не задан, вводится нулевое перемещение.
Х вращение. Задает вращение вокруг оси Х в градусах. Допустимые пределы меньше чем +-180 градусов. Если параметр не задан, вводится нулевое вращение.
Y вращение. Задает вращение вокруг оси Y в градусах. Допустимые пределы меньше чем +-180 градусов. Если параметр не задан, вводится нулевое вращение.
Z вращение. Задает вращение вокруг оси Z в градусах. Допустимые пределы меньше чем +-180 градусов. Если параметр не задан, вводится нулевое вращение.
Скорость. Задает скорость в %, мм/сек, см/мин, сек. Если параметр не задан робот движется с программной скоростью.
Пояснение
Робот движется из текущего положения в заданную аппозицию по прямолинейной траектории.
![]()
Движется по прямолинейной траектории по оси X на 50 мм, по оси Z на -30 мм.
ALIGN
Назначение
Устанавливает ось Z инструментальной системы координат параллельно ближайшей оси декартовой системы координат.
Пояснение
Если желательное направление движения установлено вдоль направления оси Z инструмента для каждого применения, DO ALIGN разрешает удобное выравнивание во время обучения, совмещая направление оси Z с ближайшей осью базовой системы координат.
HMOVE pose variable name, clamp number
Назначение
Движение робота в заданную позицию. Движение происходит по гибридному типу: старшие суставы двигаются по линейной траектории (1,2,3), суставы запястья по криволинейной траектории.
Параметр
1. Имя заданного положения.
2. Номер фиксатора
Определяет номер фиксатора, чтобы открыться или закрыться в при достижении координаты. Положительный номер закрывает фиксатор, и отрицательный номер открывает его. Любой номер фиксатора может быть установлен в максимально установленный номер через команду HSETCLAMP (или вспомогательную функцию 0605). Если опущено, фиксатор не открывается и не закрывается.
Пояснение
Эта инструкция перемещает робот в прямолинейном интерполированном движении. Начало инструментальной системы координат движется по прямолинейной траектории. Однако суставы запястья двигаются в интерполированном угловом движении.
Эта инструкция используется, когда робот должен быть перемещен в прямолинейном движении, но положении суставов запястья должно сильно изменяется ь между началом и концом движения.