

Inertia moment ab. Y axis, inertia moment ab. Z axis
Назначение
Устанавливает данные массы нагрузки (вес инструмента и детали). Данные используются, чтобы определить оптимум для ускорения робота.
Параметр
1. Масса нагрузки
Масса инструмента и детали (в килограммах). Диапазон: 0.0 до максимально возможной нагрузки..
2. Расположение центра силы тяжести ( мм)
X значение x центра силы тяжести в инструментальной системе координат
Y значение y центра силы тяжести в инструментальной системе координат
Z значение z центра силы тяжести в инструментальной системе координат
3. Момент инерции относительно Оси X, момент инерции относительно оси Y, момент инерции относительно Оси Z (Опция)
Устанавливает момент инерции вокруг каждой из осей. (kg·m2)
Момент инерции вокруг каждой оси определяется как момент вокруг осей координат, параллельных нулевой инструментальной системе координат с центром вращения в центре силы тяжести инструмента.
Объяснение
Если никакие параметры не определены, отображается текущее значение, сопровождаемое соответствующим сообщением “Change? ”
![]()
Всегда устанавливайте правильную массу нагрузки и расположение центра тяжести. Неправильные данные могут ослабить или сократить долговечность деталей или вызвать ошибки по перегрузке / отклонениям.
BATCHK
Назначение
Разрешает/запрещает контролировать поддерживающую батарею.
Пояснение
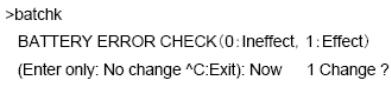
Если не надо делать изменения, нажмите ENTER. Введите 0 для того чтобы запретить проверку и 1 для того чтобы разрешить ее.
(ПРИМЕЧАНИЕ)
Ctrl+C (Exit) не может быть использована с экрана клавиатуры пульта ручного управления.
ENCCHK_ EMG
Назначение
Устанавливает приемлемый диапазон отклонения при проверке позиции робота при аварийном останове в сравнении с позицией, когда робот перезапущен.
Объяснение
Deviation =|(pose after motor power is reapplied) −(pose after the emergency stop)|
Отклонение= ((положение после включения силового питания привода) – (позиция после аварийного останова))
Приемлемый диапазон отклонения может быть установлен для каждого сустава. Если. 0.0 установлен как диапазон, проверка отклонения не выполняется. Установка слишком маленького диапазона может вызвать ошибку, когда силовое питание привода повторно включается после аварийного останова, даже если робот работает в пределах рабочих
спецификаций.
ENCCHK_ PON
Назначение
Устанавливает приемлемый диапазон для разницы значениями кодера при включении силового питания привода в сравнении со значением, когда силовое питание привода было выключено последний раз.
Пояснение
Acceptable range = | (value when control power is turn ON) − (value when the control power was turned OFF the last time)|
Приемлемый диапазон может быть установлен для каждого сустава Установка слишком маленького диапазона может вызвать ошибку при включении силового питания после аварийного останова, даже если робот работает внутри спецификаций технических характеристик.
SLOW_REPEAT
Назначение
Установка автоматической скорости в режиме замедленного повтора программ.
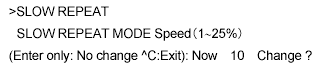
Если режим не изменяется, нажмите только ENTER. Для того чтобы изменить скорость, введите новое значение и нажмите ENTER.
(ПРИМЕЧАНИЕ)
Ctrl+C (Exit) не может быть использовано с экрана клавиатуры на пульте ручного управления.
REC_ACCEPT
Назначение
Разрешает или запрещает запись или программное изменение функций
0 – разрешает
1 – запрещает
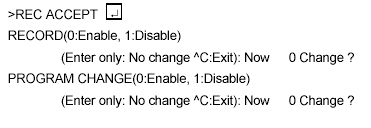
Введите 0 для того чтобы разрешить RECORD или PROGRAM CHANGE опцию. Введите 1 для того чтобы запретить опции.
(ПРИМЕЧАНИЕ)
1. Ctrl+C (Exit) не может быть использовано с экрана клавиатуры на пульте ручного управления.
2. Если PROGRAM CHANGE запрещено, появляется следующее сообщение, когда выполняется команда EDIT: “Program change inhibited. Set ACCEPT and operate again.”
REC_ACCEPT команда не может использоваться в режиме редактирования.
ENV_DATA
Назначение
Устанавливает данные о внешних условиях для периферии. (авто выключение таймера сероуправления или состояние установки пульта ручного управления)
>ENV_DATA (Enter)
AUTO SERVO OFF TIMER (0:Servo not off)
(Enter only: No change^C:exit): Now 0 Change?
Если изменять не надо, нажать (Enter). Ввод 0, запрещает авто выключение таймера сервоуправления. Разрешая таймер, вводим столько времени (в секундах), сколько сервоуправление запрещено.
Далее следует подсказка для установки ПРУ
TEACH PENDANT (0:Connect, 1:Disconnect)
(Enter only: No change ^C:Exit): Now 0 Change?
Если изменять не надо, нажать (Enter). 1 – работа робота без подключения пульта ручного управления. После отключения пульта ручного управления, установите на разъем заглушку.
(ПРИМЕЧАНИЕ)
. Ctrl+C (Exit) не может быть использовано с экрана клавиатуры на пульте ручного управления.
ENV2 DATA
Назначение
Устанавливает данные о внешних условиях для программного обеспечения.
Если изменять не надо, нажать (Enter).
Далее следует подсказка для установки терминала
>ENV2 DATA
TEACH PENDANT (0:Connect, 1:Disconnect)
(Enter only: No change ^C:Exit):Now 0 Change?
TERMINAL (0: Connect, 1:Disconnect)
(Enter only: No change ^C:Exit):Now 0 Change?
Обычно персональный компьютер используется как терминал.
(ПРИМЕЧАНИЕ)
Ctrl+C (Exit) не может быть использовано с экрана клавиатуры на пульте ручного управления.
CHSUM
Назначение
Разрешает или запрещает сброс аварийной ошибки контрольной суммы
>SHSUM
CLEAR CHECK SUM ERROR (0:Ineffect, 1:Effect)
(Enter only: No change ^C:Exit):Now 0 Change?
Если введен 0, ошибка не может быть сброшена. Если введена 1, ошибка сбрасывается. По умолчанию устанавливается «0». CHSUM сбрасывает в «0», когда силовое питание выключено.
Следующие сообщения появляются, если ошибка не может быть сброшена:
>CHSUM
Не может очистить контрольную сумму ошибок. Проверьте следующие команды или вспомогательные функции
ZZERO DEFSIG .
. >
Если любые данные до сих пор содержат проверку аварийной суммы, сообщение первого примера не появляется (CLEAR CHECK SUM ERROR). Вместо него отобразится сообщение, как во втором примере, идентифицируя дополнительную неисправность.
(ПРИМЕЧАНИЕ)
Ctrl+C (Exit) не может быть использовано с экрана клавиатуры на пульте ручного управления.
PLCAOUT data number = real value
Опция
Назначение
Устанавливает значение данного реального числа в данные определенного числа.
Параметр
1. Данные числа
Определяет количество выходных данных в целом числе. Приемлемые числа из диапазона 1 - 32.
2. Реальное значение
Задает значение реального числа, которое должно быть установлено в выходные данные, вводится в десятичном выражении. Оно также может быть установлено в именах переменных. Приемлемые числа из диапазона 0 - 65535.
(ПРИМЕЧАНИЕ)
Эта команда действительна только, когда “Built-in Sequencer Function” опция в состоянии ON. Если опция не включена, появляется следующее сообщение об ошибке (E1102) Cannot execute, no option set up. – Check option specs.
Пример
>PLCAOUT 13=120 ↵ Sets “120 (decimal notation)”to data number 13.
TPLIGHT
Опция
Назначение
Включает подсветку пульта ручного управления.
Пояснение
Если подсветка экрана пульта ручного управления отключена, тогда эта команда включает подсветку. Если команда выполняется, когда подсветка включена, подсветка остается включенной 600 секунд.