

1. Для того чтобы проверить, изменились ли нулевые данные, когда позиция манипулятора не соответствует заданной позиции.
2. Для того чтобы исправить обнуление данных, если они неожиданно изменились.
Когда нулевые данные изменены, значения для позиций робота также изменяются.
Поэтому знайте, что та же самая программа будет заканчивать движение в различных координатных точках и траектория до и после обнуления данных изменится.
Пример
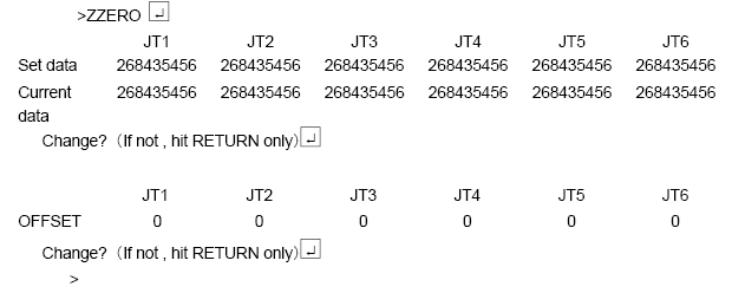
1. Следующая команда отображает нулевые данные:
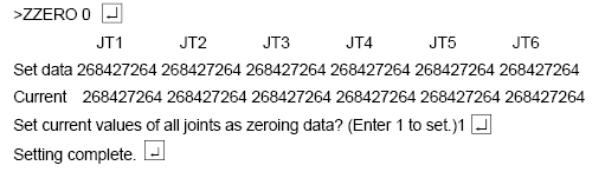
2. Следующая команда сбрасывает счетчик вращения кодера для всех суставов.

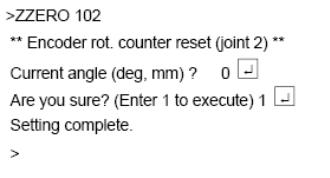
3. Следующая команда сбрасывает счетчик вращения кодера для 2 сустава для выбранной позиции сустава.
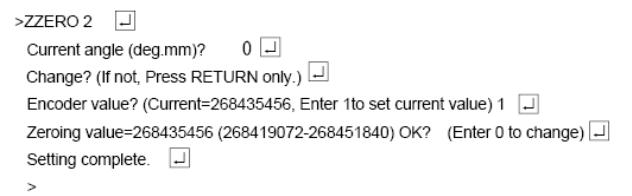
4. Следующая команда устанавливает нулевые данные так, что текущая позиция является 0°.
5. Устанавливает, чтобы робот признал значение кодер, как задание текущего положения 2 сустава 0°
ERESET
Назначение
Сброс ошибочного состояния, аналогично кнопке ERROR RESET на операционной панели
Объяснение
Когда команда ERESET выполнена, выводится сигнал ERROR_RESET. Однако это
команда неэффективна, когда ошибка происходит непрерывно.
SYSINIT
Функция
Удаляет все программы и данные в памяти и инициализирует определенные параметры.
Объяснение
Инициализирует систему и удаляет все программы, координаты, числовые переменные, и строковые переменные.
(ПРИМЕЧАНИЕ)
Все программы и переменные удаляются из памяти, когда эта команда выполняется.
HELP alpha character
HELP/M alpha character
HELP/P alpha character
HELP/F alpha character
HELP/PPC alpha character
HELP/MC alpha character
HELP/DO alpha character
HELP/SW alpha character
Назначение
Распечатывает листинги команд и инструкций AS языка.
Параметр
Задает с какой буквы алфавита начинается команда, инструкция и т.д. Если параметр пропущен, листинг распечатывается полностью
Для примера, ввод алфавитного символа с командой HELP отобразит мониторную команду или программную инструкцию, начинающуюся с этой буквы. Ввод HELP/F команды с алфавитным символом отобразит функцию, начинающуюся с этой буквы.
/М – листинг мониторных команд
/Р – листинг программных инструкций
/F – листинг функций
/РРС – листинг программных инструкций, используемых в РС программах
/МС – листинг мониторных команд, используемых с МС инструкциями
/DO – листинг программных инструкций, используемых с DO командой
/SW – листинг системных переключателей
Для некоторых команд и инструкций будут отображаться и параметры

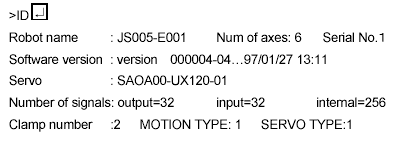
ID
Назначение
Выводит на дисплей информацию о версии программного обеспечения, встроенную в данный контроллер.
Пояснение
Отображает следующую информацию.
Имя робота: имя робота, подключенного в настоящее время
Количество суставов: количество суставов робота
Серийный номер: серийный номер робота
Версия программного обеспечения: номер версии AS программного обеспечения
Серво: номер версии программного обеспечения сервоуправления
Количество сигналов: общее количество входных, выходных, внутренних сигналов доступных в этой системе
Количество фиксаторов: общее количество фиксаторов, доступных в этой системе
Тип движения: тип движения робота
Тип сервоуправленияe: тип программного обеспечения сервоуправления
(ПРИМЕЧАНИЕ)
Если вышеупомянутая информация не соответствует фактическому роботу, войдите в контакт с нами немедленно. Не включайте силовое питание привода, не задавайте роботу выполнение каких-либо операций движения.
WEIGHT load mass,center of gravity location X, center of gravity location Y,
center of gravity location Z, inertia moment ab. X axis,