

Io/e signal number
Назначение
Отображает текущее состояние всех внешних внутренних входных/выходных сигналов.
Параметр
Сигнальные номера
1……….отображает 1-32, 1001-1032, 2001-2032
2……….отображает 33-64, 1033-1064, 2033-2064
3……….отображает 65-96, 1065-1096, 2065-2096
4……….отображает 97-128, 1097-1128, 2097-2128
По умолчанию отображается 1
Пояснение
Если системный переключатель DISPIO_01 в положении OFF, «о» будет отображать сигналы в положении ON, «х» сигналы в положении OFF.
Приоритетные сигналы отображаются заглавными буквами («О» «Х»). Если системный переключатель DISPIO_01 в положении ON, «1» сигнал включен, «0» сигнал выключен.
Если «/Е» введен вместе с командой, сигнальные номера 3001 и далее отображаются вместе с сигналами, пронумерованными 1-, 1001-, 2001-.
На дисплее постоянно обновляется информация о состоянии сигналов.
Прервать вывод информации можно клавишей (Enter)


FREE
Назначение
Дает информацию о наличии свободной памяти контроллера в процентах и битах.

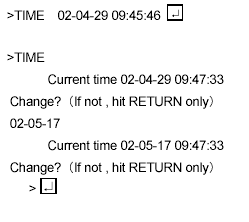
TIME year – month – day hour:minute:second
Назначение
Устанавливает и отображает текущую дату и время
Параметр
Год – месяц – дата часы: минуты: секунды
Устанавливаются в формате, описанном ниже. Когда устанавливается параметр часы: минуты: секунды параметр год – месяц – дата может быть пропущен.
Пояснение
Эта команда устанавливает календарное и суточное время на ПРУ робота. Границы значений для каждого параметра следующие:
Год (00 – 99)
Месяц (01 – 12)
Дата (01 – 31)
Час (0 – 23)
Минута (0 – 59)
Секунда (0 – 59)
Текущее время или введенные значения отображаются сопровождаемыми соответствующим сообщением “Change? ” Чтобы изменить данные, введите новые значения. Нажмите клавишу ENTER, чтобы закончить команду.
ULIMIT joint displacement values
LLIMIT joint displacement values
Назначение
Устанавливает и отображает верхний/нижний пределы границ движения робота.
Параметр
Имя точки в угловых координатах
Устанавливает программно новые пределы (верхний/нижний) границ движения робота в угловых координатах.
Пояснение
Если параметр задан, на дисплее появляются угловые координаты точки, которые можно изменить после вопроса “Change?”, на необходимые пользователю. Введите требуемые значения, как делается в команде POINT. Для того чтобы выполнить команду нажмите ENTER клавишу.
Если параметр не задан, отображается текущее положение робота, которое можно изменить или не менять в зависимости от ответа на вопрос “Change?”.


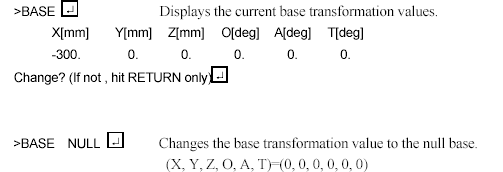
BASE transformation values
Назначение
Задает сдвиг начала координат (0,0,0,0,0,0) декартовой системы координат на определенные величины (X,Y,Z,O,A,T), заданные в параметре, создавая тем самым новую относительную систему координат.
Параметр
Имя точки (точка декартовая, сложная)
Определяет новую базовую систему координат. Точка здесь описывает положение начала координат новой системы по отношению к началу координат нулевой базовой системы координат. Если параметр не определен, на дисплее появляется информация об установленной системе координат в данный момент времени.
Пояснение
Команда BASE используется, как правило, когда есть неоднократно повторяющиеся траектории движения. Задается траектория движения в нулевой системе координат, затем, задав нужную базовую систему, без обучения точек, произойдет повторение траектории движения.
Следует учитывать, что координата точки (параметр) не может быть создана, путем обучения и запоминая, используя команду HERE. Координата точки создается аналитически (вычисляется) и вводится в память компьютера при помощи команды POINT.
Если "NULL" определяется для параметра, основные значения преобразования установлены как “нулевая база” (XYZOAT=0, 0, 0, 0, 0, 0,). Когда система инициализирована, основные значения преобразования автоматически установлены как нулевая база.
После того, как новое значение преобразования базы установлено, отображается сообщение “Change? ” . Чтобы изменить значения, введите новые значения, отделенные запятыми и нажмите ENTER. Если никакой параметр не определен, отображаются текущие значения.
Когда робот перемещается в позицию, определенную декартовыми координатами базы или вручную, используя базовый режим, система автоматически вычисляет позицию робота, принимая во внимание декартовые координаты базы, определенные здесь.
Когда переменная позиции (координата) используется, как параметр и если эта переменная позиции переопределена, обратите внимание, что следует заново переопределить позицию, используя команду BASE, чтобы изменение вступило в силу.
BASE команда не влияет позиции, заданные в угловых координатах.

Даже если координата “def ” является одной и той же в обоих примерах, робот выйдет в различные точки назначения. Смотри рисунок ниже.

![]()
TOOL transformation values
Назначение
Определяет новую инструментальную систему координат, которая задается как сдвиг инструментальной системы координат относительно нулевой инструментальной системы на определенные расстояния, выраженные в координатах X,Y,Z,O,A,T
Параметр
Имя точки (точка декартовая, сложная)
Определяет новую инструментальную систему координат. Параметр здесь описывает положение начала координат новой системы по отношению к началу координат нулевой инструментальной системы координат. Если параметр не определен, на дисплее появляется информация об установленной инструментальной системе координат в данный момент времени.
Пояснение
Инструментальная система координат с началом 0,0,0,0,0,0 находится в центре фланца робота (6-ой сустав), плоскость XOY совпадает с плоскостью фланца, ось Z параллельна оси фланца.
Если установлена нулевая инструментальная система координат, вращение вокруг осей оставляет неподвижной точку начала инструментальной системы координат, но при наличии инструмента (все технологические операции требуют наличие какого-нибудь инструмента), конец инструмента перемещается в пространстве. При обучении и дальнейшем прохождении сложных траекторий, особенно, где требуется изменение ориентации на небольших расстояниях по ходу движения, могут возникнуть осложнения такие, как неравномерное движение от точки к точке, невозможность пройти по прямой траектории, во время сложного перехода возможно столкновение с обрабатываемой поверхностью. Чтобы избежать данных ситуаций используется команда TOOL. Начало координат переносится на конец инструмента и при вращении неподвижной остается рабочая часть инструмента.
Если "NULL" определяется для параметра, основные значения преобразования установлены как “нуль инструмента” (XYZOAT=0, 0, 0, 0, 0, 0,). Нулевые координаты инструмента имеют свое начало координат в центре монтажного фланца для инструмента и оси параллельны осям последнего сустава робота.
Когда система инициализирована, основные значения преобразования автоматически установлены как нулевая база.
После того, как новое значение преобразования для инструмента установлено, отображается сообщение “Change? ” . Чтобы изменить значения, введите новые значения, отделенные запятыми и нажмите ENTER. Если никакой параметр не определен, отображаются текущие значения.
Когда робот перемещается в позицию, определенную декартовыми координатами базы или вручную, используя базовый режим или инструментальный режим, система автоматически вычисляет позицию робота, принимая во внимание декартовые координаты инструмента, определенные здесь.
Когда переменная позиции (координата) используется, как параметр и если эта переменная позиции переопределена, обратите внимание, что следует заново переопределить позицию, используя команду TOOL, чтобы изменение вступило в силу.
TOOL команда не влияет на позиции, заданные в угловых координатах.
SETHOME accuracy, HERE
SET2HOME accuracy, HERE
Назначение
Устанавливает и отображает координаты HOME (позиции безопасности) положения.
Параметры
1. Accuracy Точность
Устанавливает диапазон для точности выхода в позицию HOME в миллиметрах. Как только робот попадает в этот диапазон, движение прекращается. Если параметр не определен, по умолчанию параметр равен 1 мм.
2. HERE Задает текущее положение как позицию HOME.
Пояснение
Если параметр не определен, отображается текущее положение с запросом “Change?”, при этом можно изменять или не изменять данную позицию. Две НОМЕ позиции могут быть заданы в AS системе. НОМЕ 1 задается командой SETHOME, НОМЕ 2 задается командой SET2HOME.

![]()
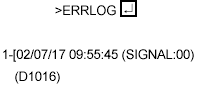
ERRLOG
Назначение
Отображает журнал ошибок
Пояснение
Отображает последние сто ошибочных ситуаций. Когда дисплей заполняется продолжить просмотр можно при помощи клавиши пробел. Ошибки расположены в хронологическом порядке (Вспомогательная функция 0702)
OPLOG
Назначение
Отображает журнал операций
Пояснение
Отображает последние сто операций в формате, показанном ниже. При заполнении экрана просмотр продолжается нажатием клавиши пробел.
(Вспомогательная функция 0703)
Пример
>OPLOG (Enter)
1 – [02/07/17 10:04:46](SIGNAL:00) [PNL]
SWITCH switch name,...,switch name=ON
SWITCH switch name,...,switch name=OFF
Назначение
Отображает и изменяет системные переключатели и их установки.
Параметры
1. Имя переключателя
Отображает состояние выбранного системного переключателя. Если параметр не задан, отображает все системные переключатели и их установки.
При вводе более одного переключателя, имена разделяются запятой.
2. ON/OFF (включен/выключен)
Задает включение/выключение выбранного системного переключателя. Если параметр не задан, отображается последняя установка переключателя.

Switch name,.... ON
Switch name,....OFF
Назначение
Задавая имя системного переключателя, устанавливается состояние включения/выключения в соответствии с ON/OFF
Параметр
Имя переключателя
Включает/выключает заданный переключатель. При задании более одного имени переключателя, они разделяются запятой.
Текущая установка системного переключателя может быть закрыта при помощи SWITCH команды.


ZSIGSPEC
Назначение
Отображает и изменяет общее число внешних и внутренних I/O сигналов.
Пояснение
Отображается текущая установка и вопрос “Change?”.
Изменение происходит при ответе на вопрос “Change?”. Эта команда изменяет только сигналы, соответствующие данным аппаратным средствам, данному программному обеспечению.

HSETCLAMP
Назначение
Присваивает номера сигналов, для того чтобы управлять фиксаторами для погрузочно-разгрузочных операций.
Пример
В примере ниже, фиксатор 3 устанавливается как двойной соленоид.

Номер фиксатора выбор номера фиксатора
Как задать фиксатор схвата?
(1:Defined as Handling clamp, 0:Not used, ENTER only:No change, CTRL+C:Exit)1
;введите 1, для того чтобы задать фиксатор схвата.
Для одного электромагнитного клапана, задается один сигнал.
Для двойного электромагнитного клапана, задаются два сигнала.

Устанавливает канал 12 в состояние ON
Устанавливает канал 13 в состояние OFF

(ПРИМЕЧАНИЕ)
Всегда используйте фиксаторы по порядку от 1 до 8. Для примера, нельзя использовать фиксатор 5 без использования фиксатора 4.
(ПРИМЕЧАНИЕ)
Ctrl+C (Exit) не может быть использована с экрана клавиатуры пульта ручного управления.
DEFSIG INPUT DEFSIG OUTPUT
Назначение
Отображает, изменяет состояние программных, приоритетных сигналов.
Параметр
INPUT, OUTPUT
OUTPUT (или 0) отображает состояние выходных сигналов, INPUT (или 1)
входных сигналов. Эти состояния могут быть изменены, когда параметр внесен. Если параметр не внесен, сигналы, используемые в настоящее время как приоритетные, отображаются в листинге.
Пояснение
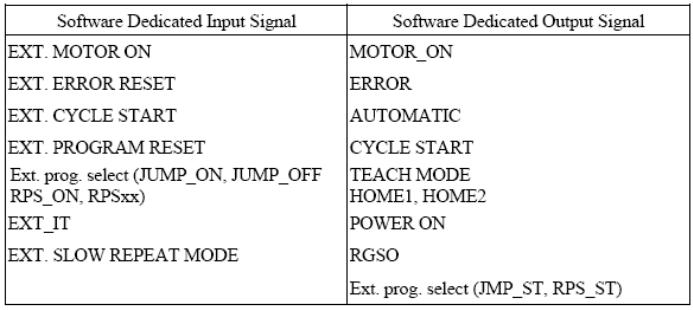
Сигналы в таблице ниже могут быть использованы как приоритетные сигналы.
Следующие коды могут использоваться с этими командами
L: перейти к предыдущему шагу
N: перейти к следующему шагу
Q: отменить последнюю операцию
Е: выход из команды
Примечание
1.Внешняя программная выборка
Когда JMP сигнал устанавливается как приоритетный, сигналы JMP-ON, JMP-OFF, JMP-ST автоматически становятся приоритетными. JMP-ST является выходным сигналом, но устанавливается он под контролем DEFSIG INPUT команды
Когда RPS сигнал устанавливается как приоритетный, сигналы RPS-ON, RPS-OFF, RPS-ST автоматически становятся приоритетными. RPS-ST является выходным сигналом, но устанавливается он под контролем DEFSIG INPUT команды
2.RPS программа
Если не менее чем один из следующих сигналов установлен как приоритетный, появляется подсказка и RPS программа должна быть введена.
3.Сигнальные номера
Сигналы могут быть установлены внутри следующих границ
Приоритетные выходные сигналы: 1 – число инсталлированных сигналов
Приоритетные входные сигналы: 1001 – число инсталлированных сигналов
4.Другое
Если номер сигнала присвоено приоритетному сигналу, оно не может быть присвоено другому приоритетному сигналу или использовано как общий сигнал.
Пример
Следующий пример показывает программно установленные приоритетные сигналы


Следующий пример сбрасывает выбор программно установленного, приоритетного выходного сигнала MOTOR_ON, изменяет сигнальный номер AUTOMATIC в 30, выбирает TEACH MODE как приоритетный сигнал и устанавливает номер сигнала 3.

ZZERO joint number
Назначение
Устанавливает значение кодера в соответствие с известной механической позиции робота. Также, количество смещения между механической позицией робота и началом координат кодера (нулевыеg данные) могут быть отображены, используя эту команду.
Параметр
Номер сустава
(1) Сбрасывает счетчик вращения кодера:
Введите номер сустава плюс 100. Например, чтобы сбросить счетчик вращения кодера для второго сустав введите:
ZZERO 102 ↵
Если “100” введен как номер сустава, все суставы сбрасываются в 0 °.
(2) Для того чтобы установить нулевые данные:
Чтобы установить нулевые данные кодера для сустава два, введите:
ZZERO 2 ↵
Если “0” введен как номер сустава, все суставы устанавливаются в 0 ° как нулевые данные.
Если никакой номер сустава не задан, отображаются текущие данные кодера, и нулевые данные.
(ПРИМЕЧАНИЕ)
Сбросьте счетчик вращений кодера до установки нулевых данных.
![]()
Используйте эту команду только для следующих целей: