5. 6. Команды управления системой
STATUS Отображает системное состояние.
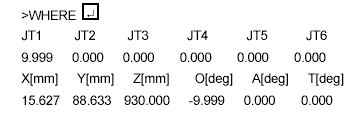
WHERE Отображает текущие данные позиции для робота.
IO Отображает состояние двоичных сигналов.
FREE Отображает объем свободной памяти.
TIME Отображает и устанавливает текущее время и дату.
ULIMIT Устанавливает верхний предел движения робота.
LLIMIT Устанавливает нижний предел движения робота.
BASE Изменяет основные значения преобразования.
TOOL Определяет значения преобразования инструмента.
SETHOME Устанавливает домашнюю позицию.
SET2HOME Устанавливает домашнюю позицию номер 2.
ERRLOG Отображает хронологию условий ошибки.
OPLOG Отображает хронологию операций.
SWITCH Отображает установку системных выключателей.
ON Включает системный переключатель.
OFF Отключает системный переключатель.
ZSIGSPEC Устанавливает и отображает общее количество сигналов ввода - вывода.
HSETCLAMP Устанавливает заданные по умолчанию спецификации
фиксатора.
DEFSIG Отображает или устанавливает программно установленные
приоритетные сигналы.
ZZERO Отображает или устанавливает данные обнуления.
ERESET Сбрасывает состояние ошибки.
SYSINIT Инициализирует всю систему.
HELP Отображает распечатку команд/инструкций AS языка.
ID Отображает информацию j версии программного
обеспечения.
WEIGHT Устанавливает данные веса нагрузки .
BATCHK Разрешает/запрещает проверку низкого напряжения батареи.
ENCCHK_ EMG Устанавливает приемлемый диапазон отклонения при проверке позиции робота: поза при аварийном
останове в сравнении с позицией, когда робот перезапускается.
ENCCHK_ PON Устанавливает приемлемый диапазон для различия в значении кодера при включении силового питания в сравнении с значением, когда силовое питание было выключено в прошлый раз.
SLOW_ REPEAT Устанавливает скорость режима замедленного повтора.
REC_ ACCEPT Разрешает/запрещает запись и или изменение программ.
ENV_ DATA Устанавливает автоматическое отключение таймера серводвигателя и ПРУ подключение / отключение.
ENV_ 2DATA Устанавливает терминал подключение/отключение.
CHSUM Очищает ошибку контрольной суммы.
PLCAOUT Устанавливает реальные значения на выходные данные. (Опция)
TPLIGHT Включает подсветку пульта ручного управления . (Опция)
IPEAKLOG Отображает достигнутый максимум текущих значений. (Опция)
IPEAKCLR Сбрасывает максимумы текущих значений. (Опция)
OPEINFO Отображает операционную информацию. (Опция)
OPEINFOCLR Очищает операционную информация . (Опция)
STATUS
Назначение
Отображает состояние системы, дает информацию о выполняемой или выполненной программе.

1. Состояние робота
Текущее состояние робота - одно из следующих:
Состояние ошибки: ошибка произошла; пробуйте операцию сброса ошибки.
Силовое питание привода выключено: силовое питание привода OFF.
Режим обучения: силовое питание включено; робот управляется, используя пульт ручного управления.
Автоматический режим: Силовое питание включено; робот управляется программой робота.
Режим повтора начало цикла разрешен: силовое питание привода включено; программа робота выполняется.
Программное ожидание: силовое питание привода включено; программа робота выполняется, и в состоянии ожидания
(выполнение WAIT, SWAIT, или команда TWAIT).
2. Среда
Текущая мониторная скорость (в процентах)
3. Состояние шагового выполнения
Текущее состояние выполнения шага.
4. Циклы выполнения
Законченные циклы: Выполнение циклов повторения уже закончено (от 0 до 32767)
Оставшиеся циклы: Оставшиеся циклы для выполнения. Если отрицательный номер был определен для выполнения цикла в команде EXECUTE, "бесконечный" отображается.
5. Имя программы
Имя программы или шаг, текущее выполняемый, или состояние ожидания.
WHERE display mode
Назначение
Отображает на дисплее положение робота, в данный момент времени.
Параметр
Выбирает режим, в котором отображается информация. Таких режимов 16,
7-16 опции. Т.е. WHERE ,....,WHERE 16. Если параметр не задан, текущее положение робота показано в угловых и декартовых координатах. Изображение режима не изменится до тех пор, пока не нажмете ENTER.
WHERE …… отображает текущее положение робота в декартовых или угловых координатах (JT1, JT2, …, JT3 |
|
WHERE 1 …… Отображает текущую позицию робота в углах. |
WHERE 2 …… Отображает текущую позицию робота в XYZOAT в базовых координатах (mm, deg). |
WHERE 3 …… Отображает текущее обученное значение (deg). |
WHERE 4 …… Отображает смещение от обученного значения (bit). |
WHERE 5 …… Отображает значение кодера каждого сустава (bit). |
WHERE 6 …… отображает скорость каждого сустава (deg/s). |
WHERE 7 …… Отображает текущую позицию, включая внешние оси. (Option) |
WHERE 8 …… Отображает текущее положение фиксированных координат детали (Option) |
WHERE 9 …… Отображает обученное значение каждого сустава для декартовой координаты. |
WHERE 10 …… Отображает ток двигателя. |
WHERE 11 …… Отображает скорость двигателя. |
WHERE 12 …… Отображает значения текущих декартовых координат, выраженные в базовых координатах другого робота |
|
WHERE 13 …… Отображает значения текущих декартовых координат, выраженные в инструментальных координатах другого робота |
|
WHERE 14 …… Отображает обученное значение тока двигателя. |
WHERE 15 …… Отображает первоначальные данные кодера. |
WHERE 16 …… Отображает скорость TCP. |