

4.5.5 Движение по указанной траектории
Прямолинейные интерполяции и угловые интерполяции движения - стандартные функции для всех роботов.
Однако, иногда необходимо переместить робот по указанному или расчетному пути.
AS система может выполнять вычисления, в то время как робот двигается, делая всевозможные, сложные движения.
Эту особенность называют “Движением по указанной траектории”.
Система разрешает выполнение движений через программный цикл, который выполняет ряд непрерывных вычислений для движения на близкие расстояния, в то время когда выполняются инструкции движения. Такой цикл программы возможен, потому что AS может выполнить инструкции, несвязанные с движением, в то время как робот
перемещается. Вычисленные сегменты движения плавно стыкуются, используя функцию CP.
Следующее - пример программы для движения по указанному пути. Инструмент робота будет следовать по траектории, определенной серией данных позиции, указанных переменной типа массив "path".
FOR index=0 TO 10
LMOVE path[index]
END
path[0] - path[10] должны быть обучены ручным методом либо при помощи вычисления.
4.5.6 Установка данных нагрузки
При установке данных нагрузки для текущего движения робота, оптимальное ускорение и замедление при нагрузке определяются автоматически. Установите правильные данные нагрузки согласно текущему движению робота.
![]()
Всегда устанавливайте правильную массу загрузки и центр тяжести. Неправильные данные могут ослабить или сократить долговечность частей или вызвать перегрузку, ошибочные отклонения. Для детальной информации см. команду/ инструкцию WEIGHT.
Данные нагрузки могут быть установлены автоматически, используя вспомогательную функцию 0406
См. Руководство Оператора для подробностей.
5.0 Мониторные команды
Эта глава группирует мониторные команды в следующих категориях, и описывает каждую команду подробно. Мониторная команда состоит из ключевого слова, выражающего команду и параметра (ов) после этого ключевого слова, как показано в примере ниже.
5.1 Команды редактирования
5.2 Команды управления программой и данными
5.3 Команды сохранения программ и данных
5.4 Команды управления программой
5.5 Команды позиционной информации
5.6 Команды управления системой
5.7 Команды бинарных сигналов
5.8 Команды отображения сообщений
Пример
Ключевое слово параметры
Параметры, отмеченные цветом, могут быть опущены
Всегда вводите пробел между ключевым словом и параметром
5.1 Команды редактирования
EDIT Запускает программу редактора.
C Заканчивает редактирование текущей программы и заменяет ее
другой программой (Change).
S Выбирает программный шаг для отображения (Step).
P Отображает заданное количество программных шагов (Print).
L Выбирает предыдущий шаг (Last).
I Вставляет новый шаг (Insert).
D Удаляет программный шаги (Delete).
F Поиск для символов (Find).
M Замена символов (Modify).
R Замена символов (Replace).
O Размещение курсора в текущем шаге (One line).
E Завершение редактированияr (Exit).
XD Вырезание и запись выбранного шага (ов) в буфер обмена.
XY Копирование и запись выбранного шага (ов) в буфер обмена
XP Вклеивание содержимого буфера.
XQ Вклеивание содержимого буфера в обратном порядке.
XS Показ содержимого буфера.
T Обучение инструкций движения в режиме редактирования
(опция)
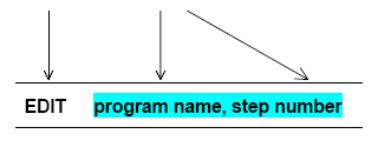
EDIT program name, step number
Назначение
Входит в режим редактирования, что позволяет создавать и редактировать программы.
Параметры
Программное имя
Определяет программу для редактирования. Если программное имя не задано открывается последняя программа, вызванная для редактирования. Для написания новой программы задается новое имя для создаваемой программы.
Номер шага
Выбирает номер шага, с которого начинается редактирование. Если номер шага не задан, редактирование начинается с шага, на котором был сделан выход из режима редактирования.
(ПРИМЕЧАНИЕ)
Программа не может редактироваться во время выполнения программы. Программа не может быть выполнена или удалена во время редактирования. Если вызывается программа, редактируемая в настоящее время, происходит ошибка.
C program name, step number
Назначение
Заменяет программу, в настоящее время находящуюся в редакторе на другую
Программное имя
Определяет программу для редактирования.
Номер шага
Выбирает номер шага, с которого начинается редактирование. Если номер шага не задан, редактирование начинается с первого шага
S step number
Назначение
Выбирает и отображает шаг программы, выбранный для редактирования
Параметр
Номер шага.
Если номер шага не задан, происходит переход на первый шаг программы. Если номер шага больше чем шагов программы, происходит переход на шаг, следующий за последним шагом программы.
__________________________________________________________________
P step count
Назначение
Отображает число шагов программы, заданных в параметре, начиная с текущего шага.
Параметр
Количество шагов
Задает количество шагов для просмотра. Если количество шагов не задано, отображаются все шаги, следующие за текущим шагом.
Объяснение
Отображается только указанное количество шагов. Последний шаг в списке готов к редактированию.
L
Назначение
Отображает предыдущий шаг.
I
Назначение
Вставляет шаг перед текущим шагом. Заканчивается ввод данной команды, нажатием клавиши Enter. Все команды, заданные до выхода из режима вставки, вводятся в программу.
Объяснение
Шаги после вставленной строки перенумеровываются. Чтобы выйти из режима вставки, нажмите клавишу ENTER. Все строки, вставленные перед выходом из режима вставки, вставлены в программу.
Пример
CLOSEI инструкция вставлена между шагами 3 и 4.
1?OPENI
2?JAPPRO #PART, 500
3?LMOVE #PART
4?LDEPART 1000
5? S 4 ; отображает 4 шаг для вставки шага перед ним.
4 LDEPART 1000
4? I ;Type the I command. напечатать команду вставки
4I CLOSEI ; напечатать инструкции для вставки.
5I ↵ ; нажать ввод для завершения вставки шагов.
5 LDEPART 1000 ;Step 4 шаг 4-ый стал пятым.
5?
(ПРИМЕЧАНИЕ)
Для того чтобы вставить линию пробелов, нажмите Spacebar или TAB , затем Enter, пока вы находитесь в режиме вставки.
D step count
Назначение
Удаляет заданное число шагов, следующих за текущим шагом.
Параметр
Количество шагов
Задает число шагов для удаления, начиная с текущего шага. Если количество шагов не задано, удаляется только текущий шаг. Если заданное количество шагов больше шагов программы, удаляются все шаги, следующие за текущим шагом. После удаления все оставшиеся шаги автоматически перенумеровываются и сдвигаются вверх.
Объяснение
Удаляет только указанное количество шагов, начинающихся с текущего шага. После того, как шаги удалены, все остающиеся шаги перенумеровываются и автоматически продвигаются и отображаются.
(ПРИМЕЧАНИЕ)
Если количество шагов указано больше чем количество шагов в программе,
все шаги после текущего шага удалены.
F character string
Назначение
Отыскивает в программе с текущего шага до последнего символьную цепочку, и переходит на первый шаг программы, содержащий в себе символьную цепочку.
Параметр
Символьная цепочка
Задает последовательность символов для нахождения и перехода на шаг программы, содержащего эти символы.

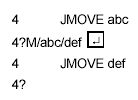
M/exiting characters/new characters
Назначение
Изменяет символы текущего шага.
Параметр
Введенные ранее символы
Определяет, какие символы должны быть перезаписаны в данной строке.
Новые символы
Задает, какие символы должны заменить ранее введенные символы.
Пример заменяет координату abc на def
R character string
Назначение
Заменяет ранее введенные символы в данном шаге на последовательность заданных символов.
Параметр
Символьная цепочка
Задает новые символы для замены ранее введенных символов.
Пояснение
Последовательность действий для использования R команды следующая:
1. Используя клавишу пробел Spacebar, установить курсор под первым символом, который необходимо изменить.
2. Нажимаем клавишу R и затем Spacebar
3. Вводим новый символ (ы) замены. Обратите внимание, что введенные символы не заменяют символы над курсором, но два пробелов слева, начинающихся над R. (См. пример ниже)
4.Нажимаем Enter
Т.к. клавиша Enter нажата, AS система проверяет корректна ли линия, если есть ошибка ввод игнрорируется
Например
Изменить скорость движения с 20% на 35%, используя R команду.
SPEED 20, ALWAYS
1? R 35 (Enter)
SPEED 35, ALWAYS
1?
O
Назначение
Устанавливает курсор за последним символом выбранного шага.
Например
Изменить имя точки аа1 на сс1, используя О команду.
3.JMOVE aa1
3?O
3.JMOVE aa1(BackSpace) ; удаляем аа1, используя клавишу BS
3.JMOVE сс1(Enter) ; вводим сс1
3.JMOVE cc1
3.?
(ПРИМЕЧАНИЕ)
Эта команда не может быть использована с пульта ручного управления
E
Назначение
Выход из режима редактирования и возврат в мониторный режим