

4.5.2 Непрерывная траектория (cp) движения
Этот пример показывает выполнению одной инструкции движения.

При выполнении инструкции движения подобно показанной выше, робот ускоряется плавно до установки текущей скорости, при движении по направлению к позиции "pick". Поскольку робот приближается к "pick", он постепенно замедляется, пока не останавливается в позиции. Серия движений типа этого, совершенной одной инструкцией движения, называют “сегментом движения”.
В случае рисунка ниже, если переключатель системы CP находится в состоянии ON, робот сначала ускоряется, чтобы достигнуть указанную скорость, но не замедляется, когда приближается к pos.1. Вместо этого, робот делает плавный переход для движения по направлению pos 2. Когда робот приближается к pos. 2, он постепенно замедляется и останавливается в этой точке. Это движение состоит из двух команд движения, и - таким образом состоит из двух сегментов движения.
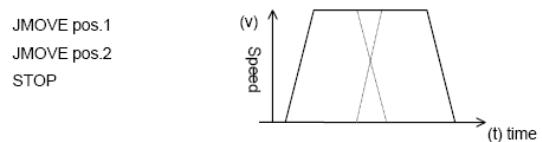
Движение подобное этому, где робот выполняет ряд движений, делая плавный переход
между сегментами движения, не останавливаясь в каждой координате, называется CP (Непрерывная траектория) движением. Выключение системного переключателя CP отключает функцию CP. Если переключатель CP выключен, робот замедляется и останавливается в конце каждого сегмента движения.
( см. 5.6 Команда SWITCH и 6.9 инструкция ON/OFF, для того как установить переключатель CP)
Движения CP могут использоваться и в прямолинейных движениях, и в угловых интерполированных движениях или в комбинации из них. Например, движения CP могут использоваться для всех следующих шагов:
прямолинейное движение (например. LDEPART) → угловое интерполированное движение (например. JAPPRO) → прямолинейное движение (например. LMOVE).
4.5.3 Прерывание cp движения
Некоторые инструкции могут приостановить выполнение программы, пока робот фактически не достигает координаты. Это называют прерыванием СР движения. Эти инструкции полезны, когда робот должен быть неподвижен, в то время как некоторые операции выполняются (например, закрытие схвата).
См. пример ниже.
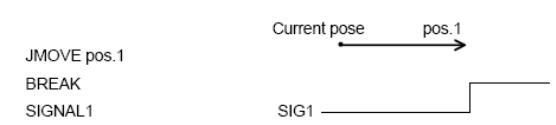
Инструкция JMOVE начинает движение робота по направлению к pos.1. Далее выполняется BREAK инструкция. Эта инструкция задерживает выполнение программы до тех пор пока движение в позицию pos.1 не завершится. В этом случае внешний сигнал не выходит до тех пор пока робот не остановится.
Следующие инструкции приостанавливают выполнение программы до тех пор пока движение робота не завершилось полностью.
Однако, будьте внимательны, для того чтобы не использовать эти инструкции, когда робот должен двигаться.

В добавление к выше сказанному, ONI инструкция также прерывает выполнение программы, но обратите внимание, что прерывание, установленное при помощи ONI инструкции может произойти в любом месте сегмента движения.
4.5.4 Отношение между переключателем cp и инструкциями accuracy, accel, и decel
·ACCURACY инструкция … Устанавливает точность позиционирования робота в конце каждого сегмента движения.
(Когда робот входит в диапазон, установленный этой командой, он считает, что достиг точки, и начинает движение в следующую точку)
(ПРИМЕЧАНИЕ)
1. Робот замедляется и останавливается, если команда не дана перед выполнением
завершения текущего движения. Некоторые из причин, которые вызывают такую ситуацию:
(1) Команда WAIT выполнена, но условия, для того чтобы продолжить программу, не установлены прежде, чем движение робота закончено.
(2) Шаги программы перед следующей инструкцией движения не закончены до окончания текущего движения.
2. При перемещении в движение CP, требуется, чтобы некоторое время вычислялся переход между сегментами движения. Поэтому, если расстояние между двумя позициями очень небольшое, вычисление не может быть закончено перед достижением второй позиции, таким образом, происходит останов робота между двумя сегментами движения
Чтобы избежать этого, необходимо уменьшить скорость. Если скорость не должна быть изменена, не задавайте позиции излишне близко друг к другу.
·ACCEL команда … … … Устанавливает ускорение робота в начале движения.
·DECEL команда … … … Устанавливает замедление робота в конце движения.
·CP переключатель … … … … … …, разрешает или запрещает движение CP.
4.5.4.1 CP ON …ТИП СТАНДАРТНОГО ДВИЖЕНИЯ
Для примера, робот делает выполнение движения, показанного ниже с CP переключателем в состоянии ON: A →B→C.
Как только текущее значение позиции попадает в диапазон точности (т.е. робот достигает точки D), наложение начинается от значений текущего движения со значением команды движения для следующей траектории.
Робот будет перемещаться непрерывно по направлению следующей траектории в соответствии с командными значениями.

Чем больше диапазон, определяющий точность, тем раньше начинается наложение. Однако ускорение для следующей траектории не начинается раньше точки, где робот начинает замедление (точка E), следовательно можно говорить, что эффект точности достигается в определенной величине, т.е. нет эффекта в установке значений точности большем, чем расстояние между B и E.
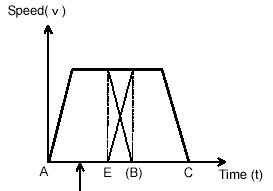
Даже, если командная величина достигает точки точности в это время, ускорение для следующей траектории не может начаться до замедления, начинающегося в точке E.
Если значения ускорения и замедления установлены достаточно маленькими, наложение начинается раньше, и робот движется по траектории с большим радиусом, но общее время для достижения точки C отличается незначительно.

Даже если замедление уменьшено, а ускорение для следующей траектории увеличено, совместная скорость не будет превышать определенную максимальную скорость, т.к. наложение не начнется до достижения роботом точки F (точки, где начинается ускорение). Иными словами, время для того, чтобы выполнить полностью замедление и ускорение одно и тоже (точка B).

4.5.4.2 CP ON … ТИП ДВИЖЕНИЯ 2
В типе движения 2, понятие ускорения и скорости в линейном движении и круговом движении отличаются от стандартного типа движения. Стандартный тип движения и тип движения 2 могут использоваться в одинаковых программах без изменений, но реальная траектория движения и скорость движения будут меняться.
1.Установка точности
Точность в угловом интерполированном движении
Траектория движения робота, соответствующая установленной точности, показана на рисунке, изображенном ниже. В примере значения точности в точке В - 1 мм, 100 мм, 200 мм. Тем же самым способом, как стандартное движение, робот начинает движение по кратчайшему расстоянию до достижения точки В, но не обязательно начинает разворот в точке, где он входит в диапазон точности. Как близко робот подойдет к точке В до начала разворота, определяется при помощи угла каждой оси, вычисленного пропорционально значению точности. При установке значения точности достаточно большим, робот может пройти по кратчайшей траектории кратчайшим расстоянием либо оставшееся расстояние текущей траектории, либо половину расстояния следующей траектории от В до С.

2.Точность линейного и кругового интерполированного движения
Траектория движения робота, соответствующая установленной точности, показана на рисунке, изображенном ниже. В примере значение точности в точке В – 1 мм, 100 мм, 200 мм. Робот начинает разворот в точке, где он вошел в диапазон точности. Робот движется по круговой траектории внутри радиуса диапазона точности. При установке значения точности достаточно большим, робот может пройти по кратчайшей траектории кратчайшим расстоянием либо оставшееся расстояние текущей траектории, либо половину расстояния следующей траектории от В до С.
Величина точности может быть установлена равной половине расстояния второй траектории.

При движении по кратчайшему пути, время цикла может быть уменьшено. Тем не менее, когда следующие состояния установлены, обработка установки точности будет такой же, как и в стандартном движении:
когда инструкции ожидания выполняются в точке В;
когда work/tool изменяются в точке В;
когда режим интерполяции меняется на посуставную (угловую) интерполяцию;
когда модель движения изменяется в точке В (обычная модель
 движение, базирующееся на фиксированной
инструментальной системе координат).
движение, базирующееся на фиксированной
инструментальной системе координат).
2.Установка скорости
Скорость интерполированного движения суставов
Такая же, как в стандартном типе движения.
Скорость в линейном и круговом интерполированном движении
В типе движения 2, если значение точности установлено большим и конфигурация робота не изменяется между двух позиций, заданная скорость достигается, даже если расстояние между двумя позициями мало.

Тем не менее, когда следующие состояния установлены, обработка установки точности будет такой же, как и в стандартном движении:
когда инструкции ожидания выполняются в точке В;
когда work/tool изменяются в точке В;
когда режим интерполяции меняется на суставную интерполяцию;
когда модель движения изменяется в точке В, из обычного режима (деталь фиксирована, инструмент движется) в режим фиксированных инструментальных размеров.
(ПРИМЕЧАНИЕ)
При попытке выполнить программу, где изменение положения робота происходит в пределах короткого расстояния, время для осуществления изменения положения будет превышать расчетное время для прохождения этого расстояния с заданной скоростью. В этом случае отдается приоритет движению в суставах (угловому движению), соответственно изменение позиции не может быть осуществлено с заданной скоростью.
3. Скорость при круговой интерполяции
В типе движения 2 максимальная скорость автоматически устанавливается соответственно способности робота выполнить характерное круговое интерполированное движение. Робот следует круговой траектории внутри окружности диапазона точности. Максимальная скорость прохождения этой траектории также устанавливается возможностями робота.
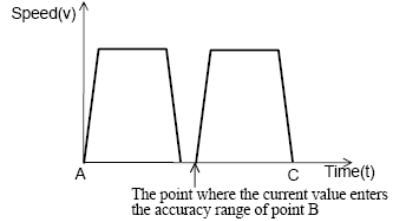
4.5.4.3 CP OFF
Когда переключатель CP находится в состоянии OFF, наложение движений не происходит. Ускорение для второго отрезка начинается после того как первый сегмент движения закончен и текущее значение находится в диапазоне ACCURACY* .
ПРИМЕЧАНИЕ* Для примера, для FS10, значение по умолчанию 1 мм
 .
.
Когда переключатель CP находится в состоянии OFF , движения по второму отрезку начнется только тогда, когда скорость замедления первого движения достигнет 0, даже если диапазон точности больше чем окончание первого отрезка.
