

4.4.3 Асинхронная обработка (прерывание)
При некоторых состояниях, подобных таким, когда есть ошибка или когда определенный внешний сигнал вводится, выполнение программы может быть прервано, и другая программа будет выполнена. Это происходит независимо от процесса выполнения основной программы и называется асинхронной обработкой (прерыванием). Как только указанный сигнал (например внешний сигнал или ошибка) обнаружен, прерывание происходит независимо от выполнения основной программы. Этот процесс
активизируется, используя инструкцию ON (или ONI)... CALL.
4.5 Движение робота
4.5.1 Синхронизация движения робота и выполнения шага программы
В AS системе, синхронизация выполнения программы и движения робота может быть изменена при помощи установки системных переключателей. Для примера, синхронизация выполнения шага изменяется следующим образом, когда системный переключатель PREFETCH.SIGINS становится ON (разрешает более раннюю обработку команд сигналов I/O) или OFF (запрещает более раннюю обработку команд сигналов I/O)
JMOVE part1
SIGNAL 1
JMOVE part2
SIGNAL 2
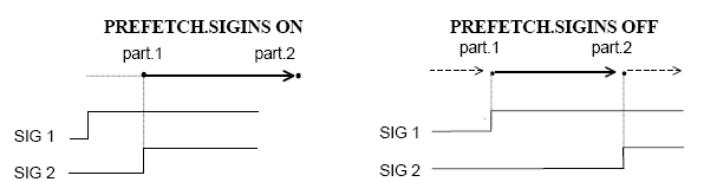
Когда PREFETCH.SIGINS в состоянии ON, внешний сигнал 1 (SIGNAL 1) выводится как только робот начинает движение в точку part1. когда программа переходит ко второй инструкции JMOVE, она ожидает пока робот не достигнет part1 до выполнения этой инструкции. Как только робот достигнет part 1, он начинает двигаться к part 2, и в это же самое время выводится внешний сигнал 2 (SIGNAL 2).
когда PREFETCH.SIGINS в состоянии OFF, сигналы выводятся после того как робот достигнет координату инструкции движения и оси совместятся.
Пример ниже демонстрирует, как программные шаги выполняются в AS системе, когда
PREFETCH.SIGINS в состоянии ON.

Если вышеупомянутая программа выполняется, когда робот - в #a, шаги продолжаются в следующем порядке:
1. В #a, робот планирует движение JMOVE #b и начинает двигаться по направлению к #b.
2. Как только начинается движение, следующий шаг, SIGNAL 1, выполняется, то есть, сигнал 1 включается сразу, после того как робот отходит от #a.
3. Выполнение переходит в шаг 4, планируется LMOVE #c, и ожидается, когда робот достигнет #b.
4. Как только робот достигает #b, он начинает двигаться по направлению к #c. Выполнение переходит к шагу 7 (планируется движение LMOVE #d), и ожидается, когда робот достигнет #c.
(ПРИМЕЧАНИЕ)
Когда PREFETCH.SIGINS находится в состоянии ON, программа обрабатывает следующий шаг, не дожидаясь пока робот достигнет указанной позиции Однако, синхронизацию затрагивает другие параметры настройки и команды/инструкции типа команды WAIT или переключателя CP. WAIT команда приостанавливает обработку шагов, пока данное состояние не удовлетворено. Когда переключатель CP в состоянии OFF, программа обрабатывает все шаги до шага, который включает инструкцию движения, и останавливается там перед продолжением. Сохраните в примечании параметры настройки системных переключателей и команды при программировании.
Как демонстрируется здесь, важно обратить внимание, что параметры настройки системных переключателей и некоторые программные инструкции затрагивают синхронизацию, в которой, AS система обрабатывает программу и движения робота. Обратите пристальное внимание на синхронизацию выходных сигналов во время программирования.
Для подробностей относительно каждого системного выключателя, обратитесь к 7.0 или к «Руководство Оператора».