

4.2.2 Команды редактора
Следующие команды редактора используются, чтобы создать и редактировать программы. (выделенные цветом параметры могут быть опущены.)
рщ
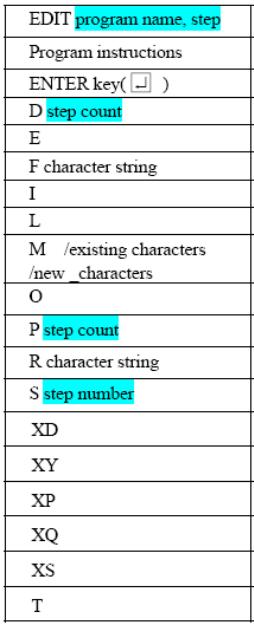
Запускает режим редактирования
Переход к новому шагу для ввода инструкций
Переход к следующему шагу без изменения текущего шага
Удаление шагов
Завершение режима редактирования, переход в мониторный режим
Поиск символов и отображение этой строки
Вставка нового шага
Отображение предыдущего шага
Замена существующих символов новыми символами
Расположение курсора в текущем шаге для редактирования
Отображение выбранного количества программных шагов
Замена символов внутри шага
Выбор программного шага
Вырезает выбранный шаг или шаги и записывает их в буфер обмена
Копирует выбранный шаг или шаги и записывает их в буфер обмена
Вставляет содержимое буфера обмена
Вставляет содержимое буфера обмена в обратном порядке
Показывает содержимое буфера обмена
Обучение во время режима редактирования
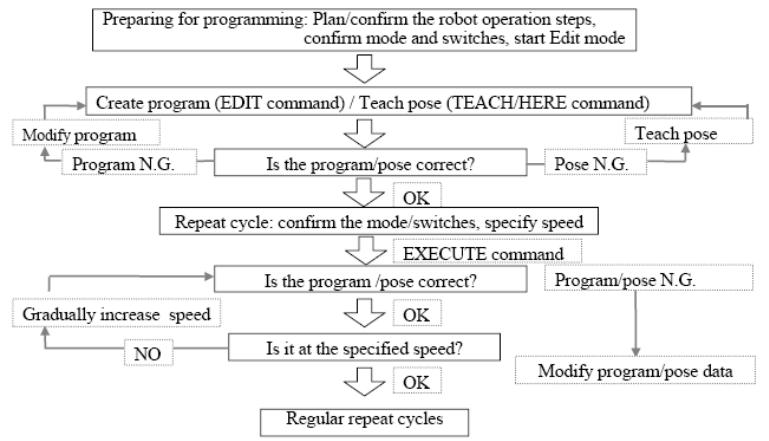
4.2.3 Процедуры программирования
Программирование осуществляется, как показано в следующих шагах:
4.2.4 Создание программ
В программе AS, две вещи нужно обучить для робота:
1. Условия работы для робота
2. Траектория, по которой движется инструмент робота
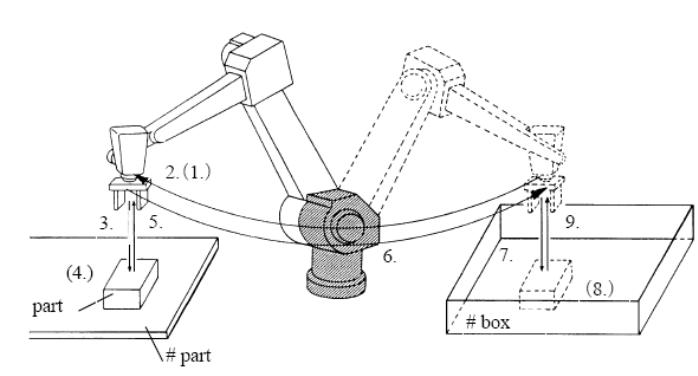
Вот - типовая программа. Робот выполнит задачу, показанную на следующей странице: поднять деталь, подаваемую движущимся транспортером, и переместить ее в коробку.
Сначала определите все движения, требуемые для того чтобы выполнить задачу:
1. Проверить, является ли схват открытым.
2. Переместиться в положение на 50mm выше детали (#part) на транспортере.
3. Переместиться прямо вниз к детали (#part).
4. Взять деталь и закрыть схват.
5.Переместиться прямо вверх на 150mm транспортера..
6. Переместиться в позицию на 200mm выше коробки (#box).
7. Переместить деталь вниз в коробку.
8. Открыть схват и выпустить деталь.
9. Переместиться снова в позицию на 180mm выше коробки.
Переменные #part, #box, которые выражают положение и конфигурацию, называются данными позиции в AS системе. Определите имена переменных позиций как показано в Главе 3 перед выполнением программы..
AS редактор используется, для того чтобы создавать и редактировать программы. Для того чтобы создать программу, названную “demo”, введите
“EDIT demo ↵ ”. появится экран, отображающий следующее
:
> EDIT demo
.PROGRAM demo
1 ?
Теперь AS ожидает ввода первого шага. Введите “OPENI ↵ ” после “1?”
> EDIT demo
.PROGRAM demo
1 ? OPENI ↵
2 ?
Введите следующую инструкцию “JAPPRO #part, 50 ↵ ” для второго шага
> EDIT demo
.PROGRAM demo
1 ? OPENI
2 ? JAPPRO #part, 50 ↵
3 ?
Введите остальную часть программы тем же самым способом. Исправьте любые ошибки при вводе шагов, нажимая Backspace перед нажимом ↵.
Если ↵ клавиша нажата в конце ошибочного шага, сообщение об ошибках появляется, и этот шаг бракуется. В этом случае, введите шаг снова. Когда полная программа была введена, экран должен выглядеть следующим образом:
>EDIT demo
.PROGRAM
1 ? OPENI
2 ? JAPPRO #part,50
3 ? LMOVE #part
4 ? CLOSEI
5 ? LDEPART 150
6 ? JAPPRO #box,200
7 ? LMOVE #box
8 ? OPENI
9 ? LDEPART 180
10 ? E ↵
>
Последний шаг “E ↵ ” не является командой для робота, но эта команда завершает режим редактирования (см. также таблицу в 4.2.1). Теперь программа завершена. Когда программ выполняется, AS система выполняет шаги в порядке от шага 1 до шага 9.
См. 11. Примеры программ для более подробной информации об их создании.