

3.8.3 Логические выражения
Логические выражения приводят к логическому значению ИСТИНА или ЛОЖЬ. Логическое выражение может использоваться в программе как условие для определения следующей операции в программе. В следующем примере, простое логическое выражение, “ x> y”, используется в подпрограмме, чтобы определить которой из
двух переменных назначить "максимальной" переменной.
IF x> y GOTO 10
max=y
GOTO 20
10 max=x
20 RETURN
При оценке логических выражений, значение 0 считают ЛОЖЬЮ и все значения отличные от нуля считаются ИСТИНОЙ. Поэтому, все реальные значения или реальные значения выражения могут использоваться как логическое значение.
Например, следующие две инструкции имеют те же самые значения, но вторая инструкция проще для понимания.
IF x GOTO 10
IF x <> 0 GOTO 10
3.9 Строковые выражения
Строковые выражения состоят из символьных строк, строковых переменных, определенных функций или другого строкового выражения, объединенных операторами. Следующие операторы используются со строковыми выражениями.
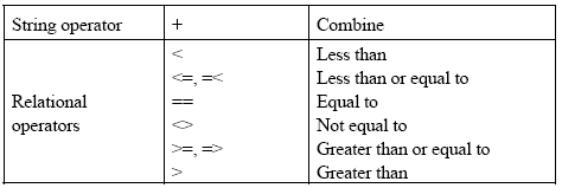
Результатом использования строкового оператора будет строка, а для относительных операторов будет реальное значение.
При использовании относительных операторов с символьными строками, строки сравниваются символ за символом из первой символьной строки. Если все символы одинаковы, эти две строки считаются равными, но если есть даже одно различие, строка с символом, имеющим более высокий код символа, оценивается как большая строка. Если одна из строк короче, более короткая считается меньшей. В относительных операциях со строками, пробелы и позиции табуляции расцениваются как символы.
(ПРИМЕЧАНИЕ)
Заглавные и строчные буквы в строковых выражениях считаются разными символами.
4.0 As программы
Эта глава дает краткий обзор об AS программах. Она объясняет, как создать и выполнить программы, и движения робота. Для лучшего понимания, фактически используйте реальную систему или PC-ROSET*, когда вы читаете эту главу.
ПРИМЕЧАНИЕ* PC-ROSET - имитатор робота персонального компьютера, совместимый с AS системой.
4.0 AS программы
4.1 Типы AS программ
4.2 Создание и редактирование программ
4.3 Выполнение программ
4.4 Процесс выполнения программы
4.5 Движение робота
4.1 Типы as программ
Программа это последовательность программных инструкций, описывающих движение робота, функционирование внешних, внутренних сигналов, различные вычисления. Программа должна быть логически верной, отражать правильный технологический процесс, включать в себя программные элементы, обеспечивающие меры безопасности.
Программное имя содержит не более 15 символов, начинается с алфавитной буквы, продолжается буквами, цифрами, периодами. Вы можете создать столько программ, сколько позволяет память контроллера. Обычно программы создаются, используя AS системный режим редактирования, но Вы можете также использовать отдельный компьютер, с загруженным KRterm или KCwin32 программным обеспечением или PC-ROSET и более поздней загрузкой, созданных программ в память робота.