

1.3 Характеристика окружающей среды
Самотлорское месторождение нефти расположено в центральной части Западно-Сибирской равнины, в бассеинах рек Вах и Ватинский Еган. Территория месторождения представляет собой плоскую сильно заболоченную аллювиальную равнину. Характерным элементом рельефа являются гривы, формы которых весьма различны.
На территории Самотлорского месторождения повсеместное распространение имеют четвертичные отложения. Они слагают все элементы современного рельефа, имеют значительную мощность, достигающую 80-100м.
Территория месторождения относится к району подзолистых, золисто-глеевых и болотных почв под зоны средней тайги.
Освоение месторождения неблагоприятно отразилось на состоянии почвенного покрова: значительно возросла площадь отчужденных земель, большие площади на месторождении загрязнены нефтью и пластовыми водами, газовые потоки, связанные с месторождением, меняют состав почвенного воздуха, обогащая его углеводородам, сероводородом, оксидами углерода, серы, азота; пластовые воды в местах их разлива привели к засолению почв.
Территория Самотлорского месторождения расположена в под зоне тайги. Растительный покров лесной зоны представлен в основном темнохвойными лесами, приуроченными к речным долинам и сфагновыми болотами, с незначительными распространением луговой растительности. Разновидность растительного покрова определяется повышенным гидроморфизом, обусловленным интесивно идущими повсеместно процессами заболачивания территории и торфонакоплением.
Экологическая защита гидрологической системы территории включает жесткие условия размещения площадных объектов среди затопляемых территорий, полное исключение технологических сливов подтоварной воды в водоемы, речки и грунтовые воды.
2. Расчетно – техническая часть
2.1 |
Расчет и выбор мощности и конструкции приводных двигателей |
Расчеты и выбор двигателя буду производить для насоса СТД-1250, исходные данные приведены в табл.1.1.
Мощность электродвигателя для насоса СТД-1250 определяется по формуле:
 (2.1)
(2.1)
Где
Q – производительность насоса м3/час;
Кз – коэффициент запаса (1.1÷1.4);
Y – плотность перекачиваемой жидкости (для холодной воды равен 9810);
Н – напор насоса м;
ηп - КПД передачи;
ηн – КПД насоса (0,3÷0,5);
3600 - коэффициент перевода производительности из м³/ч в м³/с.

По итогам расчета выбираю двигатель марки 4А160М2 У3, его технические данные приведены в таблице 2.1.
Таблица 2.1 – Технические данные двигателя
Марка двигателя |
Рном кВт |
ηном % |
cos φ |
Мп/Мн |
Ммах/Мн |
Iп/Iн |
Мmin/Мн |
4А160М2 У3 |
18,5 |
81 |
0,89 |
1,6 |
2,7 |
7,5 |
1,3 |
2.2 Конструкция и назначение электроприводов
Электропривод — это электромеханическая система, состоящая в общем случае из взаимодействующих преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Назначение элементов ЭП состоит в следующем:
электродвигатель — электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую (иногда для обратного преобразования);
электродвигатель — электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую (иногда для обратного преобразования);
преобразователь электроэнергии — электротехническое устройство, предназначенное для преобразования электрической энергии одних параметров или показателей в электроэнергию других параметров или показателей;
механическая передача — механический преобразователь, предназначенный для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласования вида и скоростей их движения;
управляющее устройство — устройство, предназначенное для формирования управляющих воздействий в ЭП. В его состав входят информационное устройство, предназначенное для получения, преобразования, хранения, распределения и выдачи информации о переменных ЭП технологического процесса и сопредельных систем, и устройство сопряжения — совокупность электрических и механических элементов, обеспечивающая взаимодействие ЭП с рабочей машиной и отдельных частей ЭП;
система управления ЭП — совокупность управляющих и информационных устройств и устройств сопряжения ЭП, предназначенная для управления электромеханическим преобразованием энергии с целью обеспечения заданного движения исполнительного органа рабочей машины;
рабочая машина — машина, осуществляющая изменение формы, свойств, состояния и положения предметов труда;
исполнительный орган рабочей машины — движущийся элемент рабочей машины, выполняющий технологическую операцию. Классификация ЭП выполняется по нескольким признакам.
1. По соотношению числа двигателей и НО РМ различают: групповой ЭП, обеспечивающий движение И О нескольких РМ или движение нескольких ИО одной РМ; индивидуальный Э П, обеспечивающий движение одного ИО одной РМ; взаимосвязанный ЭП, состоящий из двух или более двигателей или механически связанных между собой ЭП, при работе которых поддерживается заданное соотношение их скоростей и (или) нагрузок и (или) положения ИО РМ. При наличии механической связи между ЭП взаимосвязанный ЭП называется многодвигательным, при наличии электрической связи — электрическим валом.
2. По характеристике движения ИО РМ различают ЭП вращательного, поступательного и возвратно-поступательного движения; ЭП непрерывного и дискретного движения; реверсивные и нереверсивные ЭП.
3. По виду используемых двигателей различают ЭП постоянного и переменного тока, содержащие соответственно двигатели постоянного и переменного тока.
Различают две разновидности компоновки функциональных модулей в электроприводах: моноблочную, функционально-модульную.
Моноблочная компоновка — это такая компоновка, при которой все основные элементы электроприводов (трансформатор или реактор, силовая часть, коммутационная, сигнальная и защитная аппаратура, аппаратура регулирования) размещаются в одном шкафу или на одном щите, представляющем собой единое конструктивное целое.
Функционально-модульная компоновка — это компоновка, при которой все основные элементы электроприводов представляют собой функционально законченные модули, каждый из которых является отдельным конструктивным целым.
Элементы электроприводов (за исключением станочных) размещаются в шкафах. При постоянной высоте шкафов (оболочек) их размеры по глубине и фронту разнятся в зависимости от функционального назначения каждого шкафа и скомпонованной в нем аппаратуры, размещенной с учетом соблюдения электрических расстояний между частями, находящимися под различным потенциалом (и от них до заземленных частей), создания надлежащих тепловых н динамических условий для работы аппаратуры и электрооборудования, удобства монтажа и обслуживания.
2.3 |
Общая характеристика электродвигателей, пуск и их самозапуск |
Одной из основных проблем, возникающих при эксплуатации высоковольтных электродвигателей, являются их способы пуска. В зависимости от способа включения статора применяют следующие схемы пуска высоковольтных асинхронных двигателей, изображенных на рисунке 2.1: а) прямое включение (рисунок 2.1,а); б) включение через пусковые устройства: реакторные схемы - включение реактора перед двигателем или в нейтраль обмотки статора (рисунок 2.1, б,в); трансформаторные схемы – включение трансформатора перед двигателем или в нейтраль обмотки статора (рисунок 2.1, г,д); автотрансформаторная схема (рисунок 2.1, е); схема блока трансформатор-двигатель (рисунок 2.1,ж)
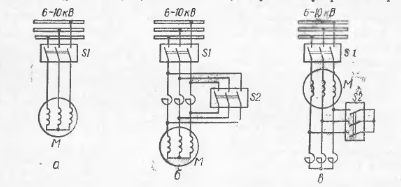


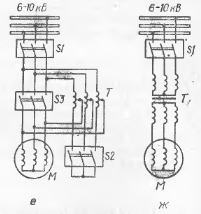
Рисунок 2.1-Схемы пуска двигателей высокого напряжения
В зависимости от способа включения обмотки возбуждения можно выделить следующие, схемы пуска синхронных электродвигателей изображенных на рисунке 2.2: с постоянно включенным возбудителем (рисунок 2.2,а) с переключением на время пуска обмотки возбуждения на гасительное сопротивление (рисунок. 2.2,б); с последовательным включением сопротивления в цепь обмотки возбуждения (рисунок 2.2, в); с питанием обмотки возбуждения от выпрямителя (рисунок 2.2, г).
Рисунок 2.2-Схемы включения обмоток возбуждения синхронных электродвигателей.
Выбор способа пуска электроприводов определяется следующей совокупностью факторов: допустимой потерей напряжении в питающей сети; значением момента сопротивления рабочего механизма; перегрузкой сетевых трансформаторов пусковыми токами; моментом инерции системы привода; допустимой длительностью пуска; максимально допустимым ускорением рабочего механизма; свойствами самого двигателя, в особенности, его механической и тепловой прочностью; экономичностью пусковых устройств и их эксплуатацией.
Самозапуском называется процесс восстановления нормально работы электропривода без вмешательства персонала после кратковременного перерыва электроснабжения или глубокого снижения напряжения.
Самозапуск считается обеспеченным, если после восстановления напряжения агрегат разогнался до нормальной угловой скорости и продолжает длительно работать с нормальной производительностью приводимого механизма и нагрузкой электродвигателя.
Самозапуск электродвигателей позволяет наиболее полно использовать средства автоматизации систем электроснабжения. Если повреждение, вызвавшее прекращение питания или глубокое снижение напряжения, быстро ликвидировано действием релейной защиты и устройств автоматики, то при обеспеченном самозапуске, это не является аварией или браком в работе системы электроснабжения и ущерба практически не возникает. Если же самозапуск не обеспечен, двигатели останавливаются, и хотя устройства автоматики сработали, ущерб может быть значительным, особенно при нарушении сложного технологического цикла (например, в химической промышленности).
Самозапуск может происходить после кратковременного глубокого снижения напряжения, вследствие близкого короткого замыкания (КЗ), отключаемого релейной защитой. При этом в самозапуске будут одновременно участвовать те двигатели, у которых напряжение снизилось до значения, вызвавшего снижение угловой скорости. Двигатели все время остаются подключенными к источникам питания.
В процессе самозапуска происходят изменения токов, напряжения и частоты вращения двигателей. На рисунке 2.3 показаны диаграммы изменения напряжения, тока, частоты вращения двигателей при их переводе на резервное питание. После отключения рабочего источника питания в момент времени t1, напряжение на выводах двигателей становится равным нулю, и начинается торможение. В момент времени t2 включается резервный источник питания. На выводах двигателей вновь появляется напряжение, и они начинают разгоняться.
Таким образом, весь процесс самозапуска можно разделить на четыре этапа.
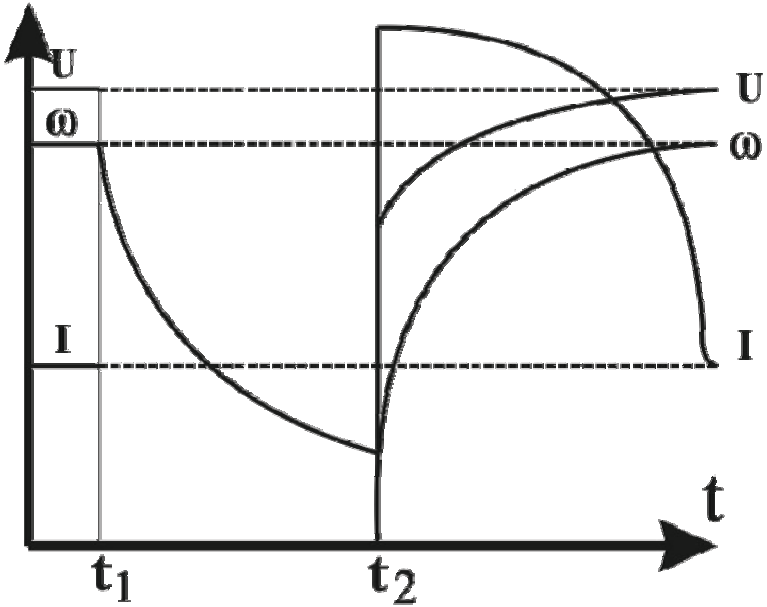
Рисунок 2.3 – Диаграмма токов, напряжения и частоты вращения двигателя при действии АВР