

Порядок виконання роботи
1. Побудувати моделі комбінаційних схем за допомогою програмного комплексу ПРОГМОЛС 2.0.
2. Переконатися в правильності функціонування моделей.
Контрольні питання
1. Охарактеризувати особливість мінімізації частково визначених функцій.
2. Охарактеризувати етапи мінімізації частково визначених функцій різними методами мінімізації.
3. Охарактеризувати основні особливості спільної мінімізації систем частково визначених перемикальних функцій.
4. Як одержати операторні форми подання перемикальних функцій для певного елементного базису?
5. Чим пояснюється можливість виникнення збоїв комбінаційних схем?
6.Як оцінити апаратурні витрати (складність) і швидкодію комбінаційних схем?
Лабораторна робота 5
Проектування та дослідження автоматів на тригерах
Мета роботи: оволодіння методами синтезу керуючих автоматів з
пам’яттю у заданому елементному базисі. Одержання
навичок в їх експериментальному дослідженні.
Теоретичні відомості
Синтез цифрових автоматів складається з етапів абстрактного та структурного синтезу.
Результатом
абстрактного синтезу автомата є його
формальний опис сукупністю п’яти
об’єктів
![]() ,
де
,
де
![]() ,
,
![]() − вхідний алфавіт автомата;
− вхідний алфавіт автомата;
![]() ,
,
![]() − вихідний алфавіт автомата;
− вихідний алфавіт автомата;
![]() ,
,
![]() − алфавіт станів автомата;
− функція переходів автомата
,
яка задає відображення множин
− алфавіт станів автомата;
− функція переходів автомата
,
яка задає відображення множин
![]() ,
тобто яка ставить у відповідність
будь-якій парі елементів декартового
добутку множин
,
тобто яка ставить у відповідність
будь-якій парі елементів декартового
добутку множин
![]() елемент
елемент
![]() ;
;
![]() − функція виходів автомата, яка задає
відображення
− функція виходів автомата, яка задає
відображення
![]() ,
або
,
або
![]() .
Отже, функція
переходів
визначає спосіб переходу автомата із
одного стану в інший, а функція
виходів
– формування вихідних сигналів.
.
Отже, функція
переходів
визначає спосіб переходу автомата із
одного стану в інший, а функція
виходів
– формування вихідних сигналів.
Структурний синтез дозволяє одержати логічну схему автомата в заданому елементному базисі.
Абстрактний синтез складається з таких етапів:
- формування вхідного та вихідного алфавітів;
- складання алгоритму функціонування автомата;
- формування алфавіту внутрішніх станів автомата;
- визначення функцій переходів і виходів за допомогою графа або відповідних таблиць.
Вхідний
алфавіт формується на основі вивчення
зовнішніх для автомата сигналів, які
можуть розглядати як логічні умови, що
змінюють режим функціонування автомата.
Різні комбінації вхідних сигналів
розглядаються як букви
![]() вхідного алфавіту.
вхідного алфавіту.
Автомат,
як правило, забезпечує управління деяким
операційним пристроєм, що перетворює
цифрову інформацію шляхом виконання
певних операторів. Кожному
оператору відповідає
певний
набір
управляючих
сигналів,
який
на абстрактному рівні
розглядається
як певна
буква
![]() вихідного
алфавіту
управляючого
автомата.
вихідного
алфавіту
управляючого
автомата.
Для опису алгоритмів функціонування цифрового автомата зручно використовувати графічні схеми алгоритмів (ГСА).
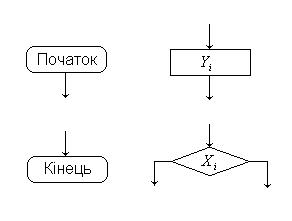
Граф схемою алгоритму називається орієнтований зв’язаний граф, який має одну початкову вершину („Початок“), одну кінцеву вершину („Кінець“) і довільну кінцеву множину умовних і операторних вершин.
ГСА складається з вершин чотирьох типів (рис. 5. 1). Алгоритм починається з вершини „Початок“ і закінчується вершиною „Кінець“. Букви вихідного алфавіту (вихідні сигнали, оператори) записують в операторні вершини, а букви вхідного алфавіту (вхідні сигнали, логічні умови) розміщують у логічні (умовні) вершини.
 Після
створення ГСА процес побудови графа
автомата і визначення алфавіту внутрішніх
станів можна формалізувати. У зв’язку
з цим ГСА, як і граф, можна вважати
формальним описом абстрактного автомата.
Після
створення ГСА процес побудови графа
автомата і визначення алфавіту внутрішніх
станів можна формалізувати. У зв’язку
з цим ГСА, як і граф, можна вважати
формальним описом абстрактного автомата.
Для побудови графа автомата виконується розмітка станів автомата на ГСА. Способи розмітки автоматів Мура і Мілі відрізняються.
Рис. 5. 1. Умовні позначення вершин у ГСА
Розмітка станів автомата Мілі здійснюється таким чином:
− символом
![]() позначається вхід наступної за початковою
вершини (логічної або операторної), а
також вхід кінцевої вершини (якщо автомат
реалізує циклічний процес);
позначається вхід наступної за початковою
вершини (логічної або операторної), а
також вхід кінцевої вершини (якщо автомат
реалізує циклічний процес);
− входи
всіх вершин, наступних за операторними,
позначаються символами
![]() .
.
Розмітка станів автомата Мура здійснюється за такими правилами:
− символом позначаються початкова і кінцева вершини;
− всі операторні вершини позначаються різними символами .
У результаті розмітки ГСА визначається алфавіт внутрішніх станів.
Побудова графа автомата виконується на основі розміченої ГСА. Число вершин графа дорівнює числу станів автомата. Кожному переходу автомата з одного стану в інший відповідає дуга графа. Дузі приписується умова, за якої здійснюється перехід автомата з одного стану в інший. Для автомата Мілі вихідні сигнали приписують дугам, а для автомата Мура – розміщують у вершинах графа.
Структурний синтез автомата методом композиції тригерів
Результати абстрактного синтезу автомата можуть розглядатися як вихідні дані для структурного синтезу. Якщо абстрактний автомат є математичною моделлю пристрою, що проектується, то структурний автомат визначає логічну організацію пристрою з урахуванням заданого елементного базису та подання вхідних і вихідних сигналів.
Слід
зауважити, що під час проектування
реальних систем на етапах структурного
синтезу може виникнути необхідність
корегування результатів абстрактного
синтезу (наприклад, ГСА та графа автомата).
Це може зумовлюватися необхідністю
усунення ризиків збою, врахуванням
тривалості структурних сигналів,
елементної бази тощо. Таке корегування
може привести до введення нових вершин
і дуг в граф автомата. Таким чином,
множина станів абстрактного автомата
![]() може відрізнятися від множини станів
структурного автомата
може відрізнятися від множини станів
структурного автомата
![]() .
.
Один з підходів теорії цифрових автоматів до побудови структурних автоматів полягає в представленні будь-якого автомата у вигляді композиції елементарних автоматів Мура, що належать до скінченого числа типів таких автоматів і мають назву тригерів.
Існують
чотири основні функціональні типи
тригерів:
![]() -тригери,
-тригери,
![]() -тригери,
-тригери,
![]() -тригери
і
-тригери.
Умовні графічні позначення синхронних
тригерів і системи під графів переходів,
що пояснюють спосіб зміни стану тригерів,
зображені на рис.1. 4. Тригери мають тільки
два стани: нульовий стан – за
-тригери
і
-тригери.
Умовні графічні позначення синхронних
тригерів і системи під графів переходів,
що пояснюють спосіб зміни стану тригерів,
зображені на рис.1. 4. Тригери мають тільки
два стани: нульовий стан – за
![]() і
і
![]() ,
та одиничний стан – за
,
та одиничний стан – за
![]() і
і
![]() .
Перехід тригерів з одного стану в інший
визначається інформаційними сигналами,
а момент переходу – перепадом синхросигналу
(в даному випадку перепад з 1 в 0). Асинхронні
входи тригерів
.
Перехід тригерів з одного стану в інший
визначається інформаційними сигналами,
а момент переходу – перепадом синхросигналу
(в даному випадку перепад з 1 в 0). Асинхронні
входи тригерів
![]() і
дозволяють встановлювати початковий
стан тригерів. Внутрішня організація
тригерів докладніше розглядається в
розділі…
і
дозволяють встановлювати початковий
стан тригерів. Внутрішня організація
тригерів докладніше розглядається в
розділі…
Узагальнена структура автомата, побудованого за методом композиції елементарних автоматів (тригерів), показана на рис. 1. 5.
Автомат
містить комбінаційну схему (КС) і пам’ять
(П), що складається з тригерів
![]() .
Входами КС є виходи
.
Входами КС є виходи
![]() тригерів і вхідні структурні сигнали
(логічні умови)
тригерів і вхідні структурні сигнали
(логічні умови)
![]() ,
що формуються в операційному пристрої.
КС виробляє структурні управляючі
сигнали
,
що формуються в операційному пристрої.
КС виробляє структурні управляючі
сигнали
![]() для операційного пристрою і функції
збудження тригерів
для операційного пристрою і функції
збудження тригерів
![]() ,
що визначають перехід автомата з одного
стану в інший. Кожному з множини станів
,
що визначають перехід автомата з одного
стану в інший. Кожному з множини станів
![]() відповідає визначений набір значень
відповідає визначений набір значень
![]() .
В синхронних автоматах перехід від
одного стану до іншого відбувається
під дією синхросигналів
,
що виробляє генератор
.
В синхронних автоматах перехід від
одного стану до іншого відбувається
під дією синхросигналів
,
що виробляє генератор
![]() .
.
Синтез синхронного автомата включає такі етапи:
1) складання списку структурних вихідних сигналів, що відповідають кожній букві вихідного алфавіту абстрактного автомата;
2) визначення тривалості кожного вихідного структурного сигналу (в числі тактів) і періоду тактуючих сигналів автомата;
3) одержання закодованої ГСА структурного автомата, тобто корегування ГСА абстрактного автомата, якщо сигнали мають різну тривалість;
4) розмітка ГСА структурного автомата;
5) складання графа структурного автомата;
6) кодування станів структурного автомата;
7) складання структурної таблиці автомата;
8) одержання МДНФ функцій збудження тригерів і керуючих сигналів;
9) представлення функцій збудження тригерів і керуючих сигналів в операторній формі;
10) побудова схеми керуючого автомата.
Якщо всі вихідні сигнали структурованого автомата мають однакову тривалість, то після п. 1 на графі абстрактного автомата замінюють абстрактні терміни структурними та переходять до виконання п. 6.
Розглянемо
приклад
синтезу автомата Мілі.
Будемо вважати, що управляючий автомат
(УА) керує операційним автоматом (ОА)
(рис. 6), який реалізує певну систему
операцій. Кожній операції відповідає
послідовність операторів (мікрооперацій),
а кожному оператору відповідає сукупність
структурних сигналів автомата із множини
![]() .
.
Нехай на етапі абстрактного синтезу одержана ГСА в абстрактних термінах (рис. 7).
Відповідність абстрактних та структурних сигналів визначається особливостями керування операційним пристроєм. Нехай за рахунок аналізу пристрою одержана відповідність зазначених сигналів (табл. 4).
На практиці необхідна тривалість керуючих сигналів визначається з урахуванням затримок в елементах операційного пристрою. Виходячи з цього обирається період тактуючих сигналів. При цьому величина має бути не менше часу переключення автомата з одного стану в інший.
Як видно
з табл. 4, керуючі сигнали
і
![]() повинні мати тривалість
повинні мати тривалість
![]() ,
а інші −
.
Подвійна тривалість сигналів може бути
забезпечена, наприклад, введенням у ГСА
додаткових операторних вершин з керуючими
сигналами, тривалість яких перевищує
.
,
а інші −
.
Подвійна тривалість сигналів може бути
забезпечена, наприклад, введенням у ГСА
додаткових операторних вершин з керуючими
сигналами, тривалість яких перевищує
.
Для одержання ГСА автомата в структурних термінах (структурної ГСА) складаємо таблицю позначень логічних умов (табл. 5) і замінюємо абстрактні терміни в ГСА (рис. 7) на структурні. Оскільки управляючі сигнали та мають тривалість , то на структурній ГСА Рис. 8) вводимо додаткову операторну вершину 4, що відповідає цим управляючим сигналам.
На рис.
8 ГСА відзначена чотирма різними станами
(![]() ).
Таку саму кількість вершин має граф
автомата Мілі, зображений на рис.9.
).
Таку саму кількість вершин має граф
автомата Мілі, зображений на рис.9.
Кожному переходу автомата з одного стану в інший відповідає дуга графа. Дузі приписується логічна умова, за якої здійснюється перехід автомата з одного стану в інший, а також набір управляючих сигналів, що відповідають даному переходові. Якщо перехід безумовний, то замість умови проставляють „−“.
Кількість
тригерів, необхідних для організації
пам’яті автомата, визначається із
співвідношення
![]() ,
де
,
де
![]() − число станів автомата. Кожному станові
− число станів автомата. Кожному станові
![]() має відповідати одна визначена комбінація
значень
.
має відповідати одна визначена комбінація
значень
.
Для прикладу, що розглядається, вибираємо коди станів відповідно до табл. 6.
Для організації пам’яті використовуємо -тригери, а для побудови комбінаційних схем – елементи булевого базису.
Відзначимо, що спосіб кодування станів впливає на правильність формування управляючих сигналів і складність автомата. (це питання докладніше розглядатиметься в розділі 1. 4).
Структурна
таблиця автомата складається за його
графом. Кожен рядок (табл. 7) відповідає
визначеному переходові автомата з
одного стану в інший. У рядку записують
вихідний стан, стан переходу, коди цих
станів, значення логічних умов, що
забезпечують перехід, необхідні значення
управляючих сигналів і функцій збудження
тригерів. Значення функції збудження
тригерів визначають згідно з таблицею
переходів тригера відповідного типу.
В кожному рядку для
-го
тригера розглядаються переходи
![]() .
Довільні значення управляючих сигналів
(0 або 1) позначаються в структурній
таблиці символом „−“. Довільні значення
управляючих сигналів визначаються
особливостями операційного пристрою.
В даному випадку як приклад такі значення
прийняті для сигналів
.
Довільні значення управляючих сигналів
(0 або 1) позначаються в структурній
таблиці символом „−“. Довільні значення
управляючих сигналів визначаються
особливостями операційного пристрою.
В даному випадку як приклад такі значення
прийняті для сигналів
![]() .
.
На
підставі структурної таблиці автомата
визначаємо МДНФ функцій збудження
тригерів і функцій управляючих сигналів.
Аргументами функцій
![]() та
є значення
та
є значення
![]() та
та
![]() у початковому стані.
у початковому стані.
Для отримання МДНФ функцій використовуємо діаграми Вейча (рис.10).
Після мінімізації одержимо функції:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Функціональна схема автомата зображена на рис. 11, де УПС − установлення початкового стану (активний рівень сигналу низький), − тактуючі сигнали.
Розглянемо приклад синтезу автомата Мура на - тригерах та елементах булевого базису.
Будемо вважати, що одержано таку саму ГСА структурного автомата, як у попередньому прикладі (рис. 7). Після розмітки станів за правилами автомата Мура структурна ГСА приймає вигляд, наведений на рис. 12, а граф автомата мура – як на рис. 13.
Кодування станів автомата Мура виконаємо аналогічно до розглянутого у прикладі автомата Мілі (табл. 7).
На основі графа складаємо структурну таблицю автомата Мура (табл. 8).
Вихідні
сигнали в автоматі Мура залежать тільки
від початкового стану
![]() і
і
![]() .
Функції збудження тригерів, як і для
автомата Мілі, залежать від початкового
стану і вхідних сигналів.
.
Функції збудження тригерів, як і для
автомата Мілі, залежать від початкового
стану і вхідних сигналів.
На підставі структурної таблиці автомата визначаємо МДНФ функцій збудження тригерів і функцій управляючих сигналів, для чого використовуємо діаграми Вейча (рис. 14).
Після мінімізації одержимо функції:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.