

3 Моделирование механической системы средствами пакета matlab
В соответствии с заданием на курсовую работу написана программы математического моделирования инерционного прибора, в которой рассчитываются параметры прибора и строятся графики переходного процесса при единичном входном воздействии. Программа написана средствами пакета MATLAB.
global T dzeta;
m=1e-3*input('Введите значение массы [г] m=');
d=1e-3*input('Введите диаметр проволоки [мм] d=');
ds=1e-3*input('Введите значение среднего радиуса витка [мм] r=');
ni=input('Введите количество витков пружины i=');
f=input('Введите значение коэффициента вязкого трения f=');
G=83670e6; % Модуль упругость второго рода [Па]
nw=ni+0.5; % Число рабочих витков пружины
k=G*d^4/(8*nw*ds^3); % Жесткость пружины
mu=30e-3; % Динамический коэффициент смазки
T=sqrt(m/k); % Период колебаний
dzeta=f/(2*k*T); % Коэффициент демпфирования
y0=[5 0]; % Начальные условия
t0=0.0; % Начальное время
tfin=100*T; % Конечное время
tspan=[t0 tfin]; % Временной интервал моделирования
[t,y]=ode23(@odefun, tspan, y0); % Решение дефференциального уравнения
figure(1)
plot(t,y(:,1)), grid % График переходного процесса
title('Переходной процесс при единичном входном воздействии','FontName','Courier')
xlabel('Время, с','FontName','Courier')
ylabel('Амплитуда колебаний, мм','FontName','Courier')
pause % Эту строку удалить
figure(2) % Открытие нового графического окна
plot(y(:,1),y(:,2)), grid % График фазовой траектории
title('Фазовая диаграмма системы','FontName','Courier')
xlabel('Перемещение, мм','FontName','Courier')
ylabel('Скорость, мм/с2','FontName','Courier')
res(1)=T;, res(2)=dzeta;, res(3)=f;
disp(' T dzeta f');
disp(res);
M- файл (odefun.m) функции пользователя, описывающей систему ОДУ
function ypr=odefan(t,y);
global T dzeta
% Система ОДУ
ypr=[y(2); ((1e-3/T^2)-(y(2).*(2*dzeta/T))-(y(1)./T^2))];
Результаты моделирования представлены ниже (см. рисунок 3-8 ).
T=0.0124 dzeta=0.0531 f=0.3000
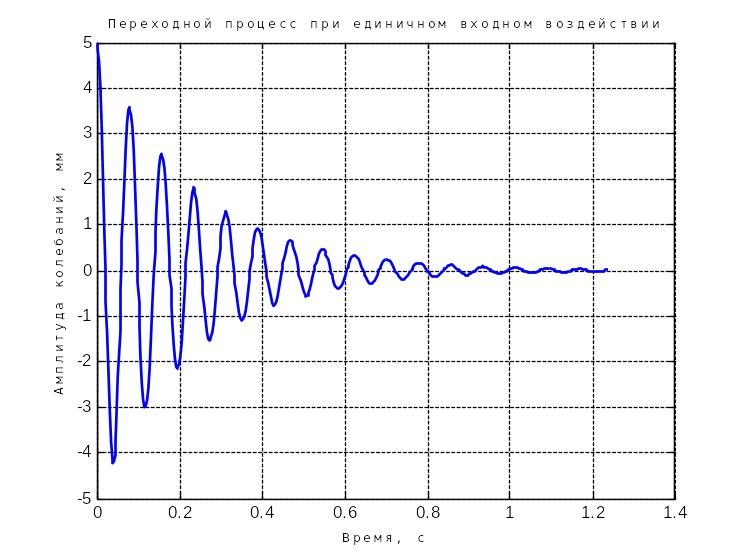
Рисунок 3 – Переходной процесс при начальных условиях
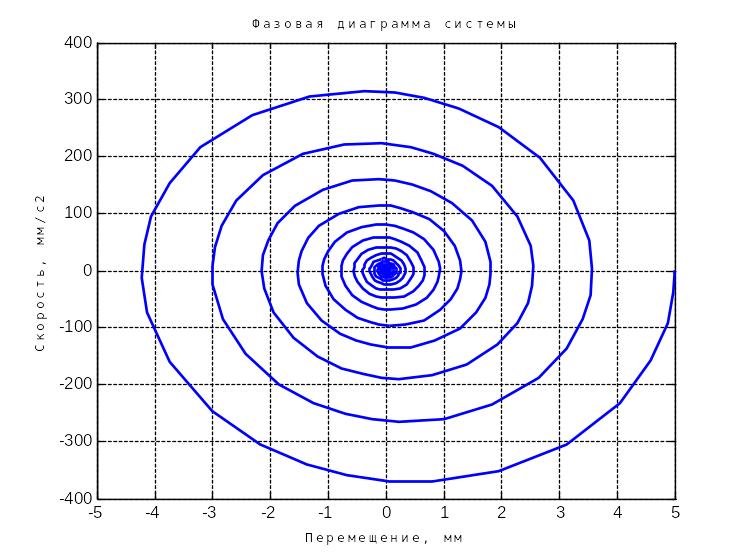
Рисунок 4 – Фазовая диаграмма при начальных условиях
T=0.0124 dzeta=0.2653 f=1.5000
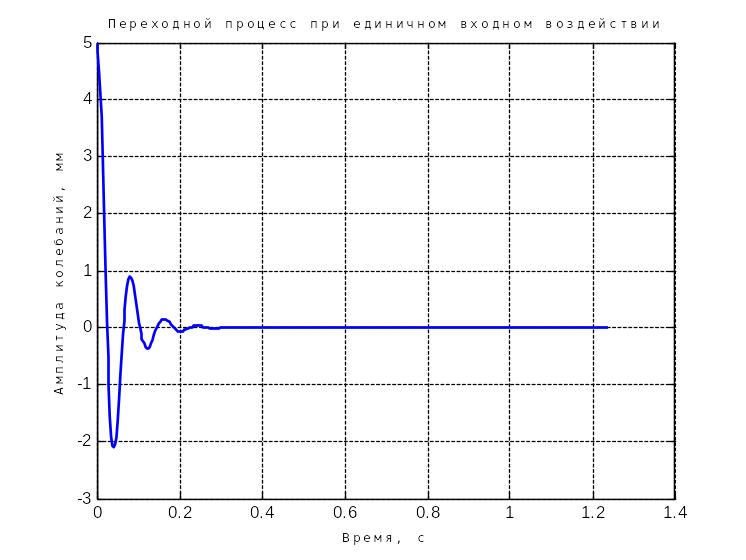
Рисунок 5 – Переходной процесс при >0
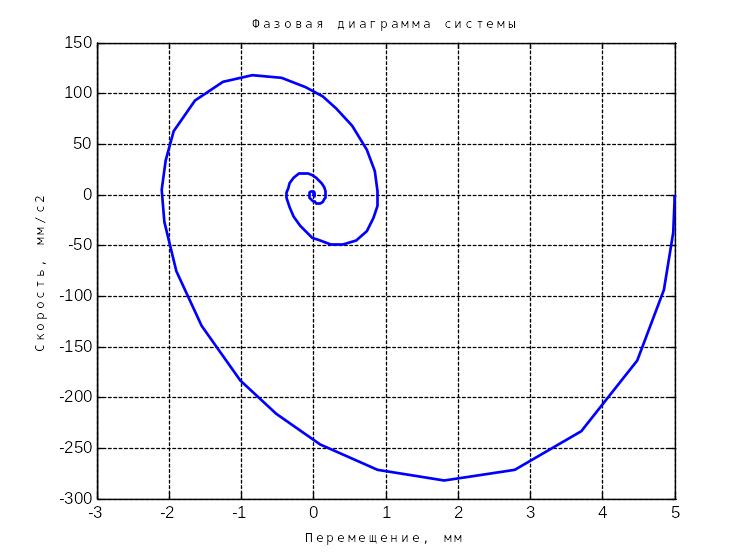
Рисунок 6 – Фазовая диаграмма при >0
T=0.0124 dzeta=0.0265 f=0.1500

Рисунок 7 – Переходной процесс при <0
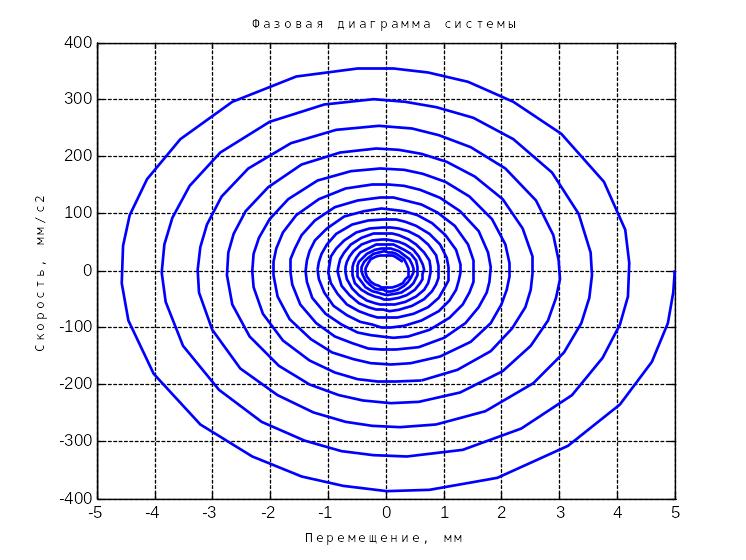
Рисунок 8 – Фазовая диаграмма при <0
Результаты моделирования позволяют сделать следующие выводы:
Рассматриваемая механическая система при начальных условиях представляет собой устойчивое колебательное звено второго порядка.
При увеличении коэффициента демпфирования колебания системы сокращаются, и колебания затухают быстрее.
Уменьшение значения коэффициента демпфирования (<0) способствует увеличению процесса затухания колебаний, то есть увеличению времени моделирования.
Список использованных источников
1. Спектор С.А. Электрические измерения физических величин: Методы измерений: Учеб. пособие для вузов. - Л.: Энергоатомиздат, 1987.
2. Зарубин В.С. Математическое моделирование в технике: Учеб. для вузов. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2001.
3. Попов Е.П. Теория линейных систем автоматического регулирования и управления. - М.: Наука, 1989.
4. Дьяконов В.П. MATLAB 6: Учебный курс. - СПб.: Питер, 2002.