

16. Регрессионные модели экспериментов и их статистический анализ.
Пусть
выходная переменная y
зависит
от контролируемых переменных
![]() . В результате выполнения n
имитационных
экспериментов будет получен вектор
. В результате выполнения n
имитационных
экспериментов будет получен вектор
![]() , который зависит от матрицы
, который зависит от матрицы
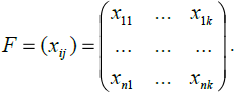
Здесь первый индекс i – номер эксперимента, j – номер переменной, так что
![]() -
значение j
–
й контролируемой переменной в i
–
м эксперименте.
-
значение j
–
й контролируемой переменной в i
–
м эксперименте.
В
теории планирования экспериментов
вектор
![]()
называется вектором результатов измерения, а матрица F называется
матрицей плана эксперимента.
При постановке экспериментов принимается априори (лат. a priori – из
предшествующего, до опыта) предположение, что зависимость между
выходной и управляемыми переменными имеет вид:
![]()
причем
функция
![]() считается
известной с точностью до конечного
считается
известной с точностью до конечного
числа
неизвестных параметров (коэффициентов)
![]() .
Другими
словами,
вид функции также задается исследователем
априори. Например,
эта
функция может быть задана в виде полинома,
тригонометрической
функции
и т.п.
.
Другими
словами,
вид функции также задается исследователем
априори. Например,
эта
функция может быть задана в виде полинома,
тригонометрической
функции
и т.п.
Из-за погрешностей эксперимента, влияния случайных факторов,
вектор
результатов измерений
![]() и матрица плана F
и матрица плана F
связаны не точной зависимостью, а стохастической зависимостью
![]()
где
![]() -
измеренная в i-м
эксперименте величина y
(выходной
сигнал),
-
измеренная в i-м
эксперименте величина y
(выходной
сигнал),
![]() - случайная ошибка «измерений» этой
величины в i-м
эксперименте,
- случайная ошибка «измерений» этой
величины в i-м
эксперименте,
![]() .
.
Следуя основам теории измерений, примем предположение о том, что
случайные ошибки распределены по нормальному закону, то есть плотность
вероятности
распределения случайной величины x
есть
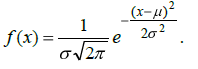
Это
предположение называют также основной
гипотезой теории
измерений. Принятие этого предположения
означает, что средние значения ошибок,
т. е. математическое ожидание случайной
ошибки измерений
![]() ,
равно нулю (
,
равно нулю (![]() ошибки
в разных опытах некоррелированы (
ошибки
в разных опытах некоррелированы (![]() и
дисперсия
и
дисперсия
![]() где
где
![]() - стандартное отклонение (разброс)
случайной величины.
- стандартное отклонение (разброс)
случайной величины.
Учитывая,
что
![]() выражение запишем в виде:
выражение запишем в виде:
![]()
В
теории планирования эксперимента
функция
![]()
называется поверхностью (имеется в виду еѐ графическое изображение)
отклика или функцией регрессии.
Задача регрессионного анализа заключается в том, чтобы оценить
значения
![]() по
выборке экспериментальных значений
по
выборке экспериментальных значений
![]() .
Наиболее изученным в теории планирования
.
Наиболее изученным в теории планирования
экспериментов
является случай, когда функция
![]() линейна по параметрам
линейна по параметрам
![]()
В
этом случае зависимость
![]() имеет
вид:
имеет
вид:
![]()
Здесь
функция
![]() рассматривается как заданная векторная
непрерывная функция своих аргументов.
рассматривается как заданная векторная
непрерывная функция своих аргументов.
Наконец, частным случаем зависимости является случай, когда
выходной сигнал y линейно зависит не только от коэффициентов
(параметров)
![]() но и контролируемые переменные также
но и контролируемые переменные также
линейно входят в правую часть. Тогда выражения преобразуется к
виду:
![]()
В матричной форме записи это уравнение имеет вид:
![]()
Здесь F - матрица размером n m (k- количество
параметров).
Теперь
рассмотрим линейные оценки значений
параметров![]() которые получаются на основе экспериментов
и имеют
которые получаются на основе экспериментов
и имеют
вид:
![]()
где T – матрица размера m n.
Оценка
![]() называется
наилучшей
линейной несмещенной оценкой,
называется
наилучшей
линейной несмещенной оценкой,
если
она имеет наименьшие дисперсии
![]() среди
всех оценок.
среди
всех оценок.