

11.Использование принципа суперпозиции для линейных многомерных систем .
Для линейных многомерных систем
 1.38
1.38
справедлив принцип суперпозиции: эффект (изменение состояния системы), вызванный воздействием на систему нескольких внешних воздействий равен сумме эффектов от каждого из таких воздействий в отдельности. В силу линейности уравнения выходов этот же принцип справедлив и для выходного сигнала.
Закон изменения вектора состояний системы представляют в виде суммы свободного и вынужденного движения системы:
![]()
Точно также выходной сигнал представляют суммой сигналов, соответствующих свободному и вынужденному движениям системы:
![]()
Под свободным движением подразумевается движение системы при ненулевых начальных условиях и отсутствующем (нулевом) входном воздействии
![]()
При
нулевых начальных условиях свободное
движение отсутствует:
![]()
Под
вынужденным
движением системы
и соответствующим выходным сигналом
подразумевается реакция системы на
ненулевое
внешнее
воздействие при нулевых начальных
условиях:
![]()
Таким образом, свободное и вынужденное движение системы определяется решением однородных уравнений состояния при ненулевых начальных условиях и неоднородных уравнений состояния при нулевых начальных условиях.
Для нестационарных многомерных линейных систем, которые описываются уравнениями (1.38), законы изменения во времени вектора состояний и вектора выходного сигнала определяются следующими формулами:
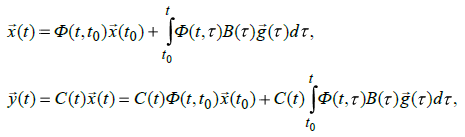
где Ф- переходная матрица, которую называют также матрицей Коши. В решении (1.43) первые слагаемые соответствуют свободному движению системы, вторые – вынужденному.
12. Алгоритм решения задачи анализа выходных процессов в многомерных системах
Алгоритм решения задачи анализа выходных процессов рассмотрим на примере стационарной системы управления
![]()
с начальными условиями
![]()
и алгебраическими уравнениями выходов
![]()
Для анализа выходных процессов необходимо осуществить два шага:
1) найти переходную матрицу. Для этого можно использовать метод (назовем его первым способом решения), основанный на определении фундаментальной матрицы, метод, основанный на применении теоремы разложения Сильвестра, и метод, основанный применении теоремы Кэли-Гамильтона.
2) По известной переходной матрице и приведенным ранее формулам найти законы изменения состояния выходного сигнала.
Рассмотрим
алгоритм поиска переходной матрицы
![]()
основанный
на предварительном определении
фундаментальной матрицы
![]() .
.
Этот алгоритм включает следующие действия.
Необходимо найти корни характеристического уравнения
![]()
где Е — единичная матрица.
Для каждой компоненты вектора состояний записывают общее решение однородной системы в виде:
![]()
На этом этапе произвольные постоянные для каждой компоненты вектора
состояний считаются различными. При этом используются известные
правила записи общего решения в зависимости от вида корней
характеристического уравнения, которые мы уже обсуждали.
2) Полученные выражения подставляются в однородные уравнения системы. Для каждой компоненты вектора состояний x(t) записать общее решение.
3) Неизвестные коэффициенты при одинаковых функциях независимой переменной t приравниваются между собой.
Последующее решение полученной системы уравнений позволяет выразить часть неизвестных постоянных через другие, так что неизвестными остаются только n констант. При этом зачастую оказывается достаточно рассмотреть первые n-1 уравнение.
4)
Записывается общее
решение, зависящее от этих n постоянных,
что позволяет выписать фундаментальную
матрицу
![]() ,
а затем и переходную
,
а затем и переходную
![]() .
.