

9. Работа мп Intel 8086 в минимальном режиме. Временные диаграммы.
В минимальном режиме функционирование микропроцессора иллюстрируется временными диаграммами, приведенными на рис. 2.10. Цикл начинается с формирования в такте Т1 сигнала M/IO, определяющего тип устройства (ЗУ или ВУ), к которому производится обращение для пересылки данных. Длительность сигнала М/IO равна длительности цикла шины, и он используется для селекции адреса устройства. В такте Т1 и в начале такта Т2 микропроцессор выставляет адрес ЗУ на линии А19-А16 и AD15-AD0 либо адрес ВУ на линии AD15-AD0, а также вырабатывает сигнал ВНЕ, который вместе с АО определяет передачу слова или одного из байтов. Одновременно с этим МП выдает строб адреса ALE, по спаду которого адрес фиксируется во внешних регистрах-защелках. На выходах этих регистров адрес сохраняется в течение всего цикла шины (до записи нового значения).
В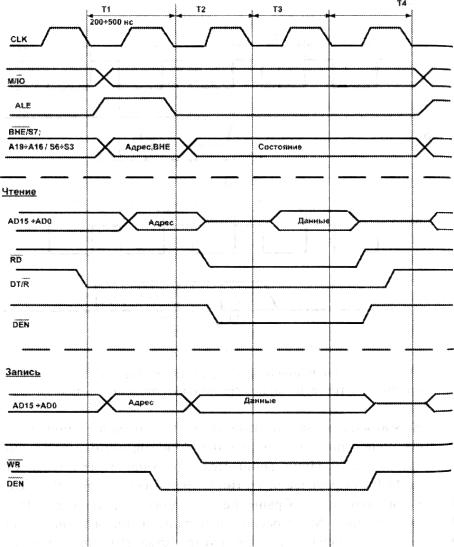 такте Т2 происходит переключение шин:
на линии A19/S6-A16/S3
поступают сигналы состояния S6-S3,
которые сохраняются
до
конца такта Т4. В дальнейшем значения
этих сигналов
зависят от вида выполняемого действия
(чтение или запись).
такте Т2 происходит переключение шин:
на линии A19/S6-A16/S3
поступают сигналы состояния S6-S3,
которые сохраняются
до
конца такта Т4. В дальнейшем значения
этих сигналов
зависят от вида выполняемого действия
(чтение или запись).
В цикле чтения в такте Т2 линии AD15-AD0 переводятся в третье состояние до появления данных от адресованного устройства. В тактах Т2-Т4 вырабатывается сигнал чтения RD = О, который указывает этому устройству на необходимость выдачи данных. Для управления буферами данных, которые обычно подключаются к линиям AD 15-AD0, в тактах Т2-Т4 формируется сигнал DE, разрешающий передачу данных. Направление передачи данных при чтении определяет сигнал DT/R = 0, действующий в течение всего цикла. После выполнения чтения и установления сигнала RD = 1 микропроцессор заканчивает такт Т4 следующим образом: линии AD15-AD0 находятся в высокоом- ном состоянии, сигналы М/Ю, DE, DT/R, S7-S3 неактивны, буферы данных отключены от канала.
В цикле записи в такте Т2 адрес на линиях AD15-AD0 заменяется данными, предназначенными для записи в адресуемое устройство. Данные остаются действительными до середины такта Т4 и сопровождаются сигналом WR = 0, который используется в качестве строба для записи данных в устройство. Сигнал DE = О появляется уже в такте Т1 и используется для подготовки буферов к передаче данных. Сигнал DT/R= 1, переключающий буферы на передачу данных в направлении к МП, удерживается на протяжении всего цикла записи. После установления WR = 1 такт Т4 заканчивается так же, как и при выполнении цикла чтения.
Таким образом, циклы чтения и записи различаются не только активными значениями сигналов RD или WR и состоянием сигнала DT/R, но и тем, что в цикле записи сигналы DE и WR становятся активными раньше и имеют большую длительность, чем в цикле чтения. Соответственно данные при записи присутствуют на шине в течение большего промежутка времени, чем при чтении.
10. Работа микропроцессора Intel 8086 в максимальном режиме. Временные диаграммы.
В максимальном режиме работа шины адреса/данных микропроцессора эквивалентна работе в минимальном режиме.
Как уже отмечалось, в максимальном режиме изменяется значение восьми управляющих сигналов, в частности МП вырабатывает сигналы состояния S2-S0, на основе которых системный контроллер формирует необходимые системные управляющие сигналы. Таким образом, МП в этом режиме работает обязательно совместно с системным контроллером (рис. 2.11).
К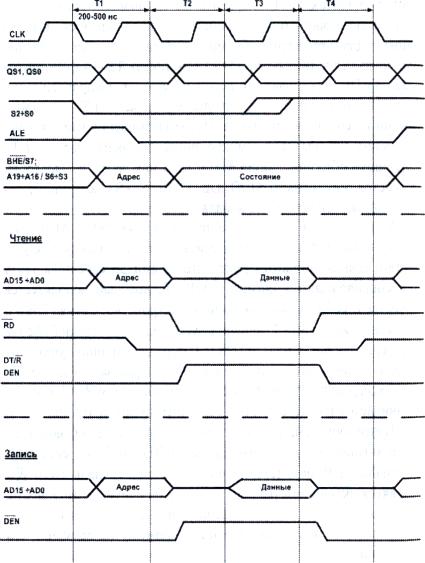 од
состояния S2-S0
выдается по срезу синхроимпульса в
последнем
такте предшествующего цикла, которым
может быть такт Т4 или Т1. В такте Т1
контроллер формирует строб ALE
и
устанавливает необходимый уровень
сигнала на выходе DT/R.
В такте Т2 начинается формирование
сигнала разрешения данных
DE,
который, в отличие от минимального
режима, имеет активный
высокий уровень, а также соответствующих
сигналов для управления операциями
чтения из памяти или внешних устройств.
Для цикла записи в такте ТЗ начинается
выработка сигналов записи
в
ОЗУ или ВУ. В такте Т4 цикл шины
заканчивается: линии AD15-AD0
переводятся в третье состояние,
устанавливаются сигналы S2
= SI
= SO
= 1, и прекращается активное состояние
управляющих сигналов.
од
состояния S2-S0
выдается по срезу синхроимпульса в
последнем
такте предшествующего цикла, которым
может быть такт Т4 или Т1. В такте Т1
контроллер формирует строб ALE
и
устанавливает необходимый уровень
сигнала на выходе DT/R.
В такте Т2 начинается формирование
сигнала разрешения данных
DE,
который, в отличие от минимального
режима, имеет активный
высокий уровень, а также соответствующих
сигналов для управления операциями
чтения из памяти или внешних устройств.
Для цикла записи в такте ТЗ начинается
выработка сигналов записи
в
ОЗУ или ВУ. В такте Т4 цикл шины
заканчивается: линии AD15-AD0
переводятся в третье состояние,
устанавливаются сигналы S2
= SI
= SO
= 1, и прекращается активное состояние
управляющих сигналов.