

5. Содержание отчета
Отчет по лабораторной работе должен содержать:
1. Название и цель лабораторной работы.
2. Основные сведения из теоретической части в том количестве, что необходимы для защиты лабораторной работы.
3. Схема лабораторной установки.
4. Результаты измерений: таблицы, графики, значения шумовых составляющих, витковая погрешность.
5. Выводы по проделанной работе.
6. Контрольные вопросы
1. Поясните принцип действия потенциометрического преобразователя линейных перемещений.
2. Поясните принцип действия потенциометрического преобразователя угловых перемещений.
3. Приведите и поясните схему включения потенциометрического преобразователя.
4. Поясните основные характеристики потенциометрического преобразователя.
5. Опишите основные конструкции потенциометрических преобразователей.
6. Поясните причины шумовой составляющей в выходном сигнале потенциометрического преобразователя линейных перемещений.
7. Рассчитайте максимально допустимое напряжение питания потенциометрического преобразователя.
8. Поясните причины витковой погрешности проволочного преобразователя угловых перемещений.
7. библиографический список
1. Элементы приборных устройств. Курсовое проектирование. В 2-х частях. Ч. 1. Расчеты. Под ред. д.т.н., проф. О.Ф. Тищенко. -М.: Высшая школа, 1978г. 328.
2. Левшина Е.С., Новицкий А.В. Электрические измерения физических величин : Измерительные преобразователи. Учебное пособие для вузов. – Л.: Энергоатомиздат, 1983. – 320 с.
Лабораторная работа №5.
Металлический терморезистор
1. Цель работы
Цель лабораторной работы – изучение физически основ функционирования металлического терморезистора и определение его основных характеристик.
2. Краткие теоретические сведения
Терморезистор – резистивный преобразователь, изменяющий свое электрическое активное сопротивление в зависимости от температуры окружающей среды.
Рассмотрим
терморезистор с металлическим
чувствительным элементом. Как известно
из курса физики активное электрическое
сопротивление металлического стержня
равно:
![]() [Ом], где
[Ом], где
![]() - удельное сопротивление металла, из
которого изготовлен стержень [Ом/м], L
– длина стержня [м], S
– площадь поперечного сечения стержня
[м2].
- удельное сопротивление металла, из
которого изготовлен стержень [Ом/м], L
– длина стержня [м], S
– площадь поперечного сечения стержня
[м2].
В соответствии с данным выражением видно, что изменить активное электрическое сопротивление можно двумя путями:
- изменением L и/или S (отношение L/S), т.е. деформируя стержень;
- изменением удельного сопротивления .
По первому принципу стояться тензорезисторы – т.е. преобразователи деформации, а по первому терморезисторы. Физическая основа работы терморезистора в зависимости удельного сопротивления металлов от температуры. В первом приближении данная зависимость может быть представлена в виде линейного закона:
![]() ,
,
где
![]() - удельное сопротивление материала
терморезистора при температуре окружающей
среды 200С,
- удельное сопротивление материала
терморезистора при температуре окружающей
среды 200С,
![]() - удельное сопротивление материала при
измеряемой температуре, Т – измеряемая
температура,
- удельное сопротивление материала при
измеряемой температуре, Т – измеряемая
температура,
![]() - температурный коэффициент сопротивления
[К-1]
– справочный коэффициент, присущий
всем металлам (для большинства металлов
- температурный коэффициент сопротивления
[К-1]
– справочный коэффициент, присущий
всем металлам (для большинства металлов
![]() ,
т.е. при изменении температуры на 10
удельное сопротивление меняется на
(0,01…1)%).
,
т.е. при изменении температуры на 10
удельное сопротивление меняется на
(0,01…1)%).
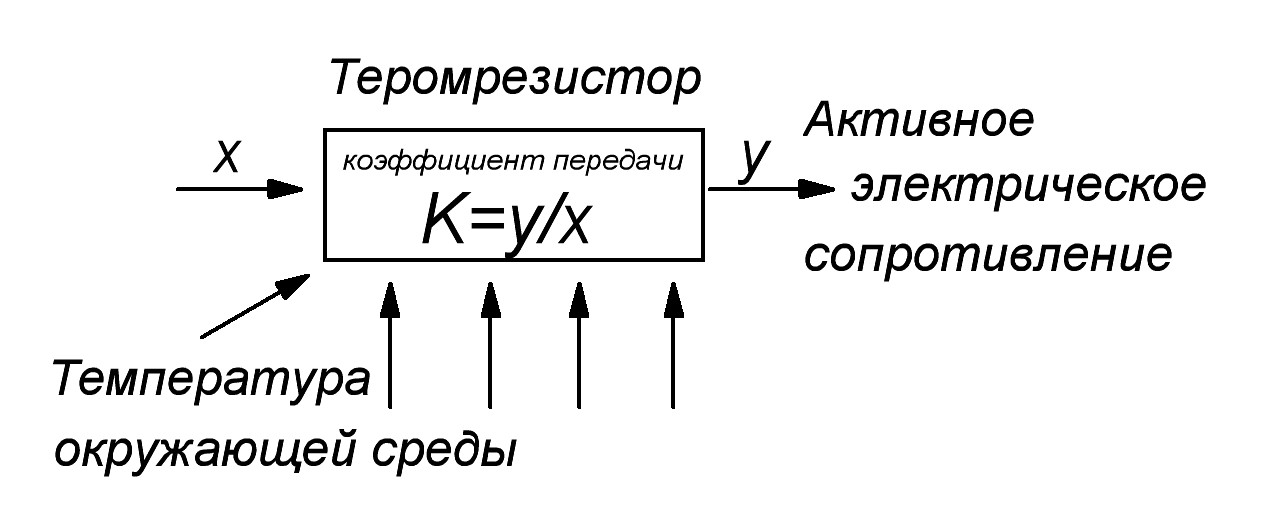
Терморезисторы часто применяются в системах измерения и контроля температуры. Коэффициент передачи равен отношению выходного сигнала «у» к входному «х» (рисунок 1). Определение коэффициента передачи терморезистора необходимо для пересчета его выходного сигнала (фактически электрического сопротивления) в температуру (измеряемую, например в 0С). Данный коэффициент используется в системах обработки сигнала терморезистора.
|
Рисунок 1 – К пояснению понятия коэффициента передачи терморезистора
|
Решение задачи определения динамических характеристик различных элементов по экспериментальным данным можно найти в специализированной литературе, посвященной теории автоматического управления (теории автоматического регулирования). В данной теории предлагаются следующие методы: метод частотных характеристик, метод импульсных переходных функций, метод регрессивного анализа и др. Более подробно смотри, например, [Топчеев Ю.И., Цыпляков А.П. Задачник по теории автоматического регулирования].
Ниже рассматривается метод, являющийся упрощенной вариацией метода импульсных переходных функций и использующий графический способ определения постоянной времени.
Используя простейший графический метод (рисунок 2) постоянная времени определяется, как промежуток времени между началом переходного процесса и моментом, когда выходная величина достигает значения 63% от установившегося в конце переходного процесса значения.
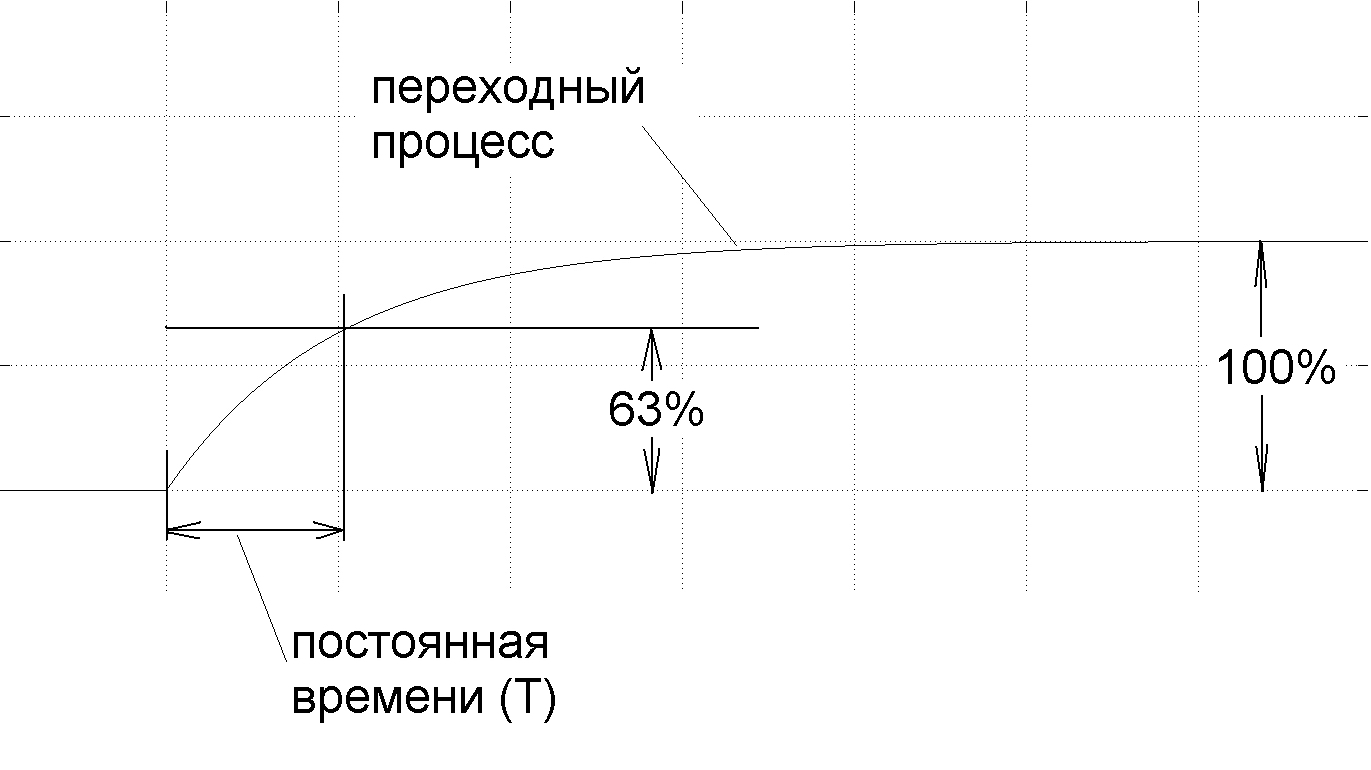
Рисунок 2 – Вид переходного процесса и графический способ определения постоянной времени