

1.5. Сучасна авіоніка як об`єкт технічного діагностування
Під авионикой нижче буде матися на увазі комплекс бортового електронного обладнання повітряного судна, що здійснює
збір даних
про навколишнє середовище від датчиків сенсорної системи,
про стан систем, що вирішують цільові завдання польоту,
про стан конструкції планеру ПС, його вузлів і блоків,
обробку зібраної інформації бортовими комп'ютерами,
передачу інформації наземним службам, які супроводжують польот ПС,
а также
видачу результатів обробки екипажу для приняття рішення
та/або
передачу керуючого сигналу безпосередно на виконавчі пристрої (механічні, електромеханічні, гідравлічні та інші).
Технічний стан авіоніки залежить від її надійності й визначається в процесі технічного діагностування. У сучасній цивільній авіації авіоніка є одним з важливих факторів, що визначають безпеку польоту, ефективність і конурентность ПС.
Авіоніка сучасних ПС створюється на основі вісокоинтегрованих систем бортового радіоелектронного обладнання, бортових цифрових обчислювальних систем і систем інформаційного обміну. При цьому мова йде як про нові принципи побудови авіоніки і її основних функціональних елементів (системи керування двигунами, пілотажно-навігаційні комплекси, комплекси зв'язку, системи життєзабезпечення, системи забезпечення безпеки польоту), так і про засоби супроводу, включаючи засоби діагностування й експлуатаційно-технічну документацію, відповідно до якої проводяться регламентні роботи й здійснюються процедури сертифікації бортового обладнання ПС.
Функції авіоніки на борті повітряного судна багаточисельні й різноманітні:
наземний контроль бортових систем і літакового обладнання з видачею інтегрального сигналу про готовність літака до вильоту;
автоматизоване введення аеронавігаційної інформації із завантажника даних;
формування й видача сигналів у систему автоматичного керування й на індикацію для автоматичного й ручного керування літаком у різних режимах зльоту, навігації й посадки;
індикація по виклику оператора на екранах пультів поточних даних прийнятих від датчиків про стан літакових систем, у тому числі двигунів, механізації крила, паливної системи;
обчислення й видача на індикацію поточних значень навігаційної, пілотажної й командної інформації;
уведення із клавіатури пультів необхідної аеронавігаційний інформації й оперативна зміна програми польоту;
корекція місця розташування й курсу за даними радіотехнічних систем ближньої навігації, супутникової системи навігації;
визначення й видача споживачам на індикаторах і екранах пультів розрахункових параметрів посадки й зльоту;
обчислення й індикація часу прольоту контрольних точок запрограмованої траєкторії з урахуванням інформації про поточний стан атмосфери й прогнозу по маршруті й у районі аеродрому посадки;
обчислення й індикація перевитрати палива через відхилення від оптимального режиму польоту й очікуваної перевитрати палива за умови виконання польоту в поточному режимі, параметри якого відрізняються від оптимальних;
керування радіотехнічними системами навігації й посадки в режимі автоматичного (по програмі) функціонування з можливістю переходу на режими ручного й напівавтоматичного керування з індикацією поточних значень частот, частотно кодових каналів, заданих значень параметрів і режимів роботи радіотехнічних систем;
забезпечення в ручному режимі керування радіотехнічними коштами, можливості виклику на індикацію з банку даних необхідних параметрів настроювання радіотехнічних систем і можливості коректування частоти шляхом заміни двох останніх розрядів;
формування сигналів, що забезпечують тест-контроль датчиків радіотехнічних коштів, як в автоматичному, так і в ручному режимі керування;
автоматизований вбудований контроль працездатності самої авіоніки виявлення несправних каналів зв'язку, контроль вірогідності інформації від систем, що сполучають, і реєстрація результатів контролю для наступного технічного обслуговування;
формування інформації й видачу повідомлень на екрани про стан інформаційно-вимірювальних систем, відмова яких може привести до скорочення експлуатаційних можливостей системи і їхньої придатності;
формування сигналів-підказок про необхідні дії для виконання режимів і при зміні режимів у польоті для видачі їх на індикатори;
перерахування поясного часу в час по Гринвичу й видачу на індикацію й споживачем параметрів висоти, швидкості й дальності у двох системах мер;
імітація польоту з відображенням інформації на індикаторах і екранах пультів;
індикація на індикаторах радіолокаційного зображення радіолокаційної системи;
забезпечення отказоустойчивости системи при збоях апаратур, зовнішніх перешкодах і внутрішніх збурюваннях у системі, а також неправильних діях екіпажа.
До складу інтегрованого комплексу бортового електронного обладнання входять:
сенсорна система, що служить для виміру параметрів навколишнього середовища, інших систем літального апарата, орієнтації літального апарата в просторі, спеціального устаткування, що вирішує цільові завдання польоту, і включающая аналогові (АД) і цифрові (ЦД) датчики;
аналого-цифрові перетворювачі (АЦП), службовці для підготовки аналогової інформації, що надходить із АД, до уведення в мікропроцесорну мережу;
мікропроцесори, що провадять обробку інформації з датчиків сенсорної системи по заздалегідь заданих алгоритмах, і об'єднані в бортову;
приладова панель, що містить систему електронних, електрооптичних, механічних, електромеханічних та ін. індикаторів і приладів, зосереджених на робочих місцях операторів і призначених для відображення інформації про стан контрольованих об'єктів;
засоби інтерактивного обміну оператора й авіоніки, що представляють собою пульти вводу-вивіду інформації з локальної обчислювальної мережі й призначені для відображення результатів обробки інформації й уведення рішень оператора для наступного впливу на літальний апарат і спецобладнання;
цифро-аналогові перетворювачі (ЦАП), призначені для перетворення результатів обробки в сигнали, що подаються на автоматичні виконавчі устрої;
автоматичні й ручні виконавчі устрої (АИУ й РИУ, відповідно), призначені для безпосередніх впливів на траєкторію польоту повітряного судна.
Всі вироби й системи авіоніки з погляду їх льотної й технічної експлуатації повинні володіти однією загальною властивістю – пристосованістю до діагностування.
Пристосованість об'єкта до діагностування (контролепридатність) - властивість об'єкта, що характеризує його придатність до проведення діагностування заданими засобами. |
Багатофункціональність авіоніки припускає, що всі системи авионики, обладнання й окремі устрої на борті ПС будуються по модульному (блоковому) принципі й у процесі експлуатації є відновлюваними системами.
Під модулем розуміється функціонально й конструктивно закінчений пристрій, що реалізує певну функцію або набір функцій, який демонтується у випадку виявлення в ньому несправності й заміняється на свідомо працездатний при технічному обслуговуванні ПС на стояночной лінійці. |
Таким чином, модуль є Типовим Елементом Заміни в комплексі авіоніки.
Типові Елементи Заміни в бортових системах ПС виконуються у вигляді швидкозмінних модулів (ШЗМ) радіоелектронних, обчислювальних і електричних систем, а також у вигляді агрегатів, яки легко демонтуються (ЛДА), у складі електромеханічних, механічних і гідравлічних систем. |
Одним з головних структурних нововведень в авіоніці стає повна інтеграція цифрових систем бортового обладнання в цілому (включаючи керування літаком і двигунами, керування літаковими системами, системами розваги й оповіщення пасажирів, діагностики стану й бортового технічного обслуговування всіх систем і агрегатів літака й ін.) і об'єднання їх у єдиний комплекс, проектований за загальною технологією з поширенням модульного принципу на всі цифрові системи й блоки.
Модули системи авіоніки установлюються в крейты2; зовнішній вид такого крейта показаний на рис. 1.6
Р ис.
1.6.
Крейт модульної авіоніки
ис.
1.6.
Крейт модульної авіоніки
Модулі встановлюються в крейт через особову частину й можуть бути замінені в умовах експ-луатації. Передні панелі ШЗМ закріплюються на каркасі крейта за допомогою гвинтів, що не випадають. Розсіює тепло від електронних компонентів приділяється за рахунок конвекції, для чого верхня й нижня поверхні каркаса крейта є перфорованими. Для кращого відводу тепла від електронних компонентів плати ШЗМ розташовані вертикально.
Будь-яка функціональна система авионики включає декілька крейтов, їхня кількість визначається складністю функцій і вимогами компонування [3]. Звичайно крейтов у системі два, що дозволяє не тільки розподіляти між ними завдання, але й забезпечити резервування на випадок відмов (рис. 1.7) .
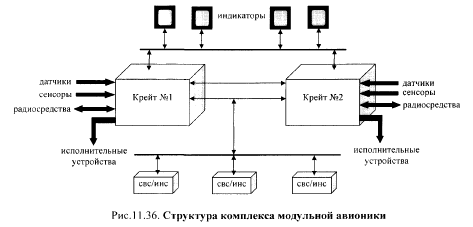
Рис. 1.7. Структура комплексу модульної авіоніки
Вхідною інформацією для комплексу є сигнали від датчиків ПС і його сенсорів - радіолокатора, інфрачервоної оглядової системи й ін. Вихідна інформація передається пілотам на індикатори, а від функцій автоматичного керування - на виконавчі пристрої. Наприклад, функція автопілоту управляє приводами елеронів, рулей напряму та висоти.
Конструкція крейта забезпечує механічний монтаж у ньому групи ШЗМ, містить засобів для його закріплення в технічному відсіку літального апарата, а також підключення ШЗМ до іншого обладнання авіоніки. Основою несучою конструкцією крейту є каркас, у якому розміщені:
напрямні, що забезпечують механічну фіксацію положення ШЗМ у каркасі й належне механічне зчленування з'єднувачів;
з'єднувачі для електричного підключення схеми боксу до фідера об'єкта;
пристрій комутації, що містить оптоелектроні й напівпровідни-кові компоненти для організації передачі інформації з резервованих системних шин усередині боксу й між боксами, а також розподілу електроживлення.
Крейт має наступні типові габаритні розміри: висота – 270 мм, глибина – 250 мм, ширина визначається кількістю встановлених ШЗМ, її максимальне значення – 450 мм, максимальна маса – 20 кг. Можлива побудова багатоповерхових об'ємних конструкцій крейта.
Усередині крейта прокладені лінії електроживлення й внутрішня мережа передачі даних, а зовнішні сигнали надходять безпосередньо на рознімання модуля, що їх використає. Переваги такого підходу укладаються в наступному:
зміна уведення/висновку впливають тільки на цей модуль, а не передаються по ланцюжку на системну плату й заднє рознімання, як при звичайному компонуванні;
захист від електромагнітних перешкод і розряду блискавки може бути більше ефективної, тому що схема захисту може бути розміщена безпосередньо на модулі, близько до вступника сигналу;
технічне обслуговування проведення полегшене завдяки розміщенню рознімань у більше доступних місцях.
Умовно крейты розділяються на функціональні крейты й концентратори. Апаратури функціонального крейта підтримує одну із цільових функцій системи авіоніки. Концентратор є компонентом авіоніки, що забезпечує кілька спеціальних функцій інтегрованого комплексу бортового обладнання.
Для виконання своїх функцій крейты комплектуються модулями різних типів. Звичайно є наступний набір модулів:
обчислювальний модуль;
модуль запам'ятовувального пристрою бази даних;
модуль мережного контролера;
модуль графічної обробки;
модуль концентрації сигналів;
модуль електроживлення;
модуль підтримки нормальних умов.
Обчислювальний модуль являє собою повноцінний компактний комп'ютер (рис. 1.8). Кожний із установлюваних у крейт обчислю-вальних модулів, а їх може бути декілька, здатний виконувати в режимі поділу часу кілька додатків, причому додатки можуть ставитися до різних рівнів критичності.

Програмне забезпечення (ПО) для обчислювальних модулів має дві верств. Один з верств являють собою виконувані додатки, інша верства ізолює додатка від застосовуваної обчислювальної платформи, забезпечуючи їхню незалежність.
Програми-додатки виконуються не на реальної БЦОМ, а на віртуальній машині. Це дозволяє змінювати й удосконалювати апаратуру й програмне забезпечення незалежно друг від друга, а також застосовувати без усяких змін раніше розроблені програми.
Модуль запам'ятовувального пристрою бази даних виконує функцію електронної бібліотеки, до якої при необхідності звертаються пілоти, а також інші модулі комплексу, або може використатися для запису в польоті інформації для наземного технічного обслуговування.
Модуль мережного контролера служить для зв'язку крейта з локальною мережею комплексу. Якщо в мережі використається топологія «зірка», то даний модуль служить перемикачем, забезпечуючи полнодуплексную зв'язок компонентів мережі.
Модуль графічної обробки збирає інформацію для відображення, готовить і передає в індикатори підготовлене зображення. Він також може одержувати відеосигнал від сенсорів ПС, наприклад, від інфрачервоної оглядової системи або радіолокатора. Отримане відеозображення масштабується, на нього накладається символьна інформація й підготовлена для індикації картинка передається в індикатор.
Модуль концентрації сигналів служить для прийому тієї інформації від літакових систем і датчиків BC, що надходить у комплекс із бортових інтерфейсів різних видів, наприклад, від систем, що видають інформацію послідовним кодом по ARING 429. Модуль перетворить цю інформацію, упаковує її й передає в мережу комплексу для використання іншими модулями. Наявність модуля концентрації сигналів дозволяє зосередити апаратури, необхідну для прийому унікальних видів інтерфейсів, в одному місці, всім іншим модулям комплексу досить мати тільки кошти для доступу до загальної мережі, у яку модуль концентрації сигналів транслює все, що одержує. При необхідності модуль концентрації сигналів може приймати й перетворювати в цифрову форму аналогові й дискретні сигнали різного типу. З метою зменшення довжини й маси проведення концентратор сигналів може розташовуватися й поза основним крейта - ближче до датчиків сигналів, тоді конструктивно він виконується у вигляді окремого блоку.
Модуль електроживлення перетворить первинна напруга бортсети (~115 В або =27 В) у номінали напруги, необхідні для харчування інших модулів крейта. Він може бути двохканальним. Наприклад, у комплексі „Prо Line 21“ [5] модуль електроживлення складається із двох незалежних джерел живлення, тому відмова одного не впливає на роботу іншого. Кожний із цих джерел здатний забезпечувати електроживленням весь крейт, але в нормальному режимі, коли обидва джерела справні, навантаження розподіляється між ними нарівно, тому джерела працюють у полегшеному режимі.
Модуль підтримки нормальних умов забезпечує примусове охолодження крейта, а при дуже низькій температурі навколишнього середовища - підігрів.
Як бачимо, апаратури комплексу авіоніки складається з обмеженого набору функціональних модулів, по своїх розмірах вони менше звичних електронних блоків.
Швидкозмінні модулі можуть складатися з однієї або декількох несучих плат (НП) із установленими елементами (мікросхемами, резисторами, конденсаторами, кріпильними елементами, радіаторами, розніманнями й т.п.). Зокрема, функціональна плата бортового комп'-ютера містить процесор, оперативні й постійне запам'ятовувальні пристрої, контролери вводу-вивіду, таймери, контролер переривань і т.п. У якості ДЗУ у всіх модулях використається енергонезалежна пам'ять. При необхідності, на несучі плати монтуються конструктивні елементи й рознімання для установки додаткових функціональних плат розширення – - мезонінів3 , що дозволяють збільшити обчислювальні потужності БСМ, розширити їхні функціональні можливості й т.п.
Як слідує зі схеми, структура всієї бортової електроніки є модульної, ієрархічної, що дозволяє максимально уніфікувати вимоги до електронних блоків по конструктивних розмірах, електроживленню й стикуванню з іншими блоками. Конструктивна схема електронного обладнання крейта представлена на рис. 1.9.

Рис. 1.9. Конструктивна схема електронного обладнання крейта
В авіоніке широко використаються наступні типи мезонінів:
мезонін, який забезпечує інформаційні зв`язки по ARINC 429 і реалізує 8 входних и 4 виходних канала М- ARINC 429;
мезонін, по MIL1553B 2 резервованих канала М-МIL;
мезонін, по STANAG3910 2 канала М- STANAG 3910;
мезонін, по ARINC 629 2 канала М- ARINC 629.
мезонін, який реалізує розширення пам'яті несучої плати М-FLASH.
При необхідності, для комплексів, у складі яких з якої-небудь причини відсутні концентратори, можливе створення мезонінів - перетворювачів інформації, що надходить у нетиповій формі, (наприклад, підсилювачі аналогових сигналів, аналого-цифрові перетворювачі й т.п.).
Всі быстросъемные модулі й модулі, замінні на стоянках, включаються в крейт через интерфейсный роз'їм і сполучаються через інтерфейс, комунікації для якого прокладені на задній стінці крейту, тому всі модулі мають устрій сполучення із цим інтерфейсом. Це дозволяє конструктивно уніфікувати всі однойменні модулі (тобто виконати їх конструктивно однаковими).
Розробка уніфікованого ряду конструктивів модулів забезпечує їхня взаємозамінність і дозволяє використати їх у будь-якому крейте, на будь-якому літальному апарату, незалежно від його специфіки.
Хоча в комплексі авіоніки кожний модуль пристосований для виконання певних функцій (обчислення, зберігання даних, електроживлення й т.п), ці функції модуль виконує не в інтересах якоїсь окремої системи, а в інтересах всіх завдань, розв'язуваних у комплексі.
Комплекс авіоніки не має чітко виділених систем. Він організований у вигляді єдиного апаратного середовища, системи перетворилися у функції, які реалізовані програмно в цьому середовищі.
Окремі БЦОМ і обчислювачі в каналах аналогової авіоніки замінені загальними процесорними ресурсами, які розподіляють між собою й виконують всі прикладні програми. Така організація дозволяє оптимально використати обчислювальні ресурси.
Як приклади приведемо дані по інтегральному цифровому складі на борті Ан-148 (рис. 1.10) и А-380.

Рис. 1.10. Ілюстрація до доповіді Генерального Конструктора „АНТК“
Д.С. Киви на науково-технічної конференції в НАУ, квітень 2007 р.
Kомплекс авіоніки А-380 містить 1200 мікропроцесорів, які обробляють 4 мільйони різних програм.
Прикладне ПО не залежить від типів застосовуваних процесорів, їхня взаємодія будується через проміжні стандартні інтерфейси. Це дозволяє вдосконалювати апаратне середовище без необхідності переробляти програмне забезпечення.
Структура комплексу є гнучкою й масштабованої, це дозволяє легко адаптувати його під вимоги різних застосувань і для різних типів ПС, а також полегшує розширення можливостей і поліпшення характеристик комплексу в майбутньому. Ця гнучкість досягається,
по-перше, за рахунок модульної побудови комплексу й,
по-друге, за рахунок з'єднання модулів у мережу.
Функціональний модуль може бути розміщений у будь-якім місці ПС і за рахунок швидкодіючої мережі передачі даних він пов'язаний з іншими модулями так само тісно, як якби вони перебували в одному електронному модулі.