

Значение ресурса
Режим работы |
Легкий |
Средний |
Тяжелый |
Очень тяжелый |
, ч. |
5000 |
2000 |
1000 |
500 |
Расчетный
ресурс
должен быть не меньше допустимого
ресурса
![]() для заданного (принятого) режима работы,
т. е.
для заданного (принятого) режима работы,
т. е.
![]() .
.
Для универсальных и широкоуниверсальных станков, работающих в условиях повышенных нагрузок и вибраций (деформационного упрочнения, наростообразования), принимается тяжелый режим работы, для которого установлена долговечность 1000 ч.
Если критерии долговечности не выполняется, то есть Tо <Tp, необходимо внести коррективы в параметры передачи.
1.Увеличить
длину ремня Lp,
приняв ближайшее большее значение в
стандартном ряду. При
этом уменьшается число пробегов ремня
![]() и, соответственно, пропорционально
увеличивается долговечность Tо.
Увеличение Lp
потребует перерасчета межосевого
расстояния а.
Остальные параметры передачи не
изменяться.
и, соответственно, пропорционально
увеличивается долговечность Tо.
Увеличение Lp
потребует перерасчета межосевого
расстояния а.
Остальные параметры передачи не
изменяться.
2.Увеличить диаметр шкивов: взять ближайшее большее dp1 из стандартного ряда и пересчитать для него новое значение dp2. В этом случае автоматически возрастает длина ремня Lp (и, как следствие, растет а), что положительно влияет на число пробегов ν, уменьшая его. Однако, одновременно с ростом dp1 и dp2 повысится скорость ремня что негативно сказывается на ν, увеличивая его значение. Но в целом, рост Lp будет более существенным, чем прирост V, поэтому результирующие значение ν будет уменьшаться.
Одновременно с этим , увеличение dp1 вызовет снижение напряжения изгиба в ремне:
,
а значит и σmax. Этот фактор гораздо в большей степени благоприятно скажется на долговечности, так как Tо и σmax связаны степенной зависимостью. Так, уменьшение σmax на 10% вызовет рост Tо примерно на 70% (при прочих равных условиях). Поэтому способ корректировки 2) является более эффективным для повышения долговечности клиновых ремней по сравнению с 1), но сопровождается более существенным увеличением габаритов передачи.
Спроектированная передача считается работоспособной, если выполняются оба расчетных критерия:
σmax [ σp];
Tо
![]() Tp.
Tp.
Сила давления на валы
Расчетная схема к определению силы F давления на вал, где расположен ведущий (малый в данном случае) шкив, представлена на рис. 6.1.4.
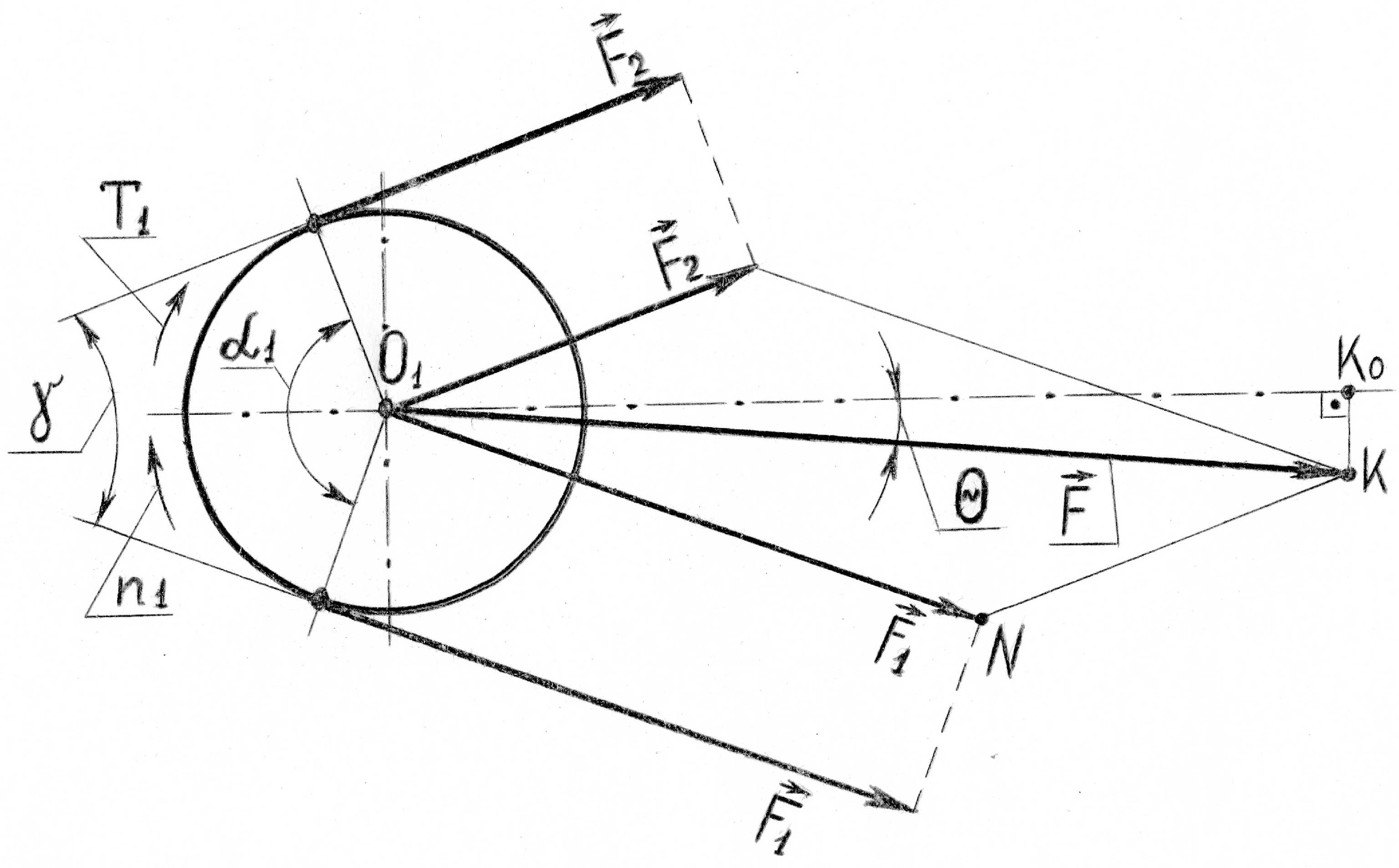
Рис. 6.1.4. Схема сил, действующих на вал
Силы
в ведущей (F1)
и ведомой (F2)
ветвях ремня приведены к оси шкива,
точке О1.
Результирующий вектор силы
![]() получен геометрическим суммированием
векторов сил
получен геометрическим суммированием
векторов сил
![]() и
и
![]() :
:
![]()
Численное значение силы F находится из треугольника ΔO1NK по теореме косинусов:
![]()
Угол отклонения Ө силы F от линии центров передачи (для рекомендуемых передаточных чисел u 6…7) достаточно мал, поэтому в инженерных расчетах им можно пренебречь. В этом случае сила F направляется по линии центров передачи, что упрощает расчет реакций в опорах.
В уточненных расчетах, где требуется учесть угол Ө, его можно определить, используя приведенную расчетную схему из ΔO1K Kо:

Здесь: F1- F2= Ft – соотношение, вытекающее из уравнения равновесия моментов от сил F1, F2, Ft, приведенных к оси шкива – точке О1;
F1+ F2=2 Fо – формула Ж.В.Понселе, связывающая силы в ведущей и ведомой ветвях с силой предварительного натяжения ремня F0:
![]() ;
;
![]() -
коэффициент
тяги, который характеризует уровень
нагруженности ременной передачи.
-
коэффициент
тяги, который характеризует уровень
нагруженности ременной передачи.
Для клиноременных передач, работающих с нагрузкой, близкой к номинальной: Ψ≈0,45…0,55.
Расчеты показывают, что для этих значений Ψ и предельно рекомендуемых передаточных чисел u≈5…7, угол Ө не превышает 6о.
Выбор оптимального варианта
При проектировании клиноременных передач в оболочке WinMachine, модуль APM Trans, конструктор получает большие возможности анализа, так как результаты расчетов представляют собой целый комплекс многовариантных решений (при одних и тех же исходных данных). В принципе, совокупность этих конструкторских решений можно свести к задаче многопараметрической оптимизации по одному или нескольким критериям. Теоретические основы и методика такой оптимизации хорошо разработаны, например, [1, 44], но это выходит за рамки тематики настоящего учебника. Поэтому ограничимся, общим анализом результатов машинного расчета, который лишь условно будем называть оптимизацией.
В качестве варьируемых параметров клиноременной передачи можно считать: