

Настройка регуляторов, выполненных на основе микропроцессорных
контроллеров
В современных системах управления технологическими процессами электротехнической, энергетической, химической, металлургической, пищевой и других отраслях промышленности широко применяются регуляторы на основе микропроцессорных контроллеров. Отличительной особенностью таких регуляторов является переменная структура, устанавливаемая программно. Процесс программирования сводится к извлечению из памяти нужных алгоритмов, которые объединяются в систему заданной конфигурации и в них устанавливаются требуемые параметры настройки. Оптимальные параметры настройки можно определять из вышеприведенных способов и устанавливать их вручную. Возможности микропроцессорных контроллеров позволяют этот процесс автоматизировать. Рассмотрим процесс автоматической настройки регулятора на примере регулятора "Ремиконт-130".
Настройка основана на анализе автоколебаний в контуре регулирования. Для установки автоколебаний алгоритм РАМ переводится в режим настройки. Возникшие колебания не должны достигать порогов ограничения. Настройка выполняется для ПИ-закона регулирования, при этом определяются два параметра настройки - коэффициент пропорциональности Кр и постоянная времени интегрирования Ти. Если предполагается использовать ПИД-закон, то после определения Кр и Ти в алгоритме РАН устанавливается Kд = Tд/Ти = 0,1÷0,3, при этом значение Кр может быть увеличено на 20÷40 %.
Настройка выполняется итеративным способом: анализируются параметры колебаний для несущих параметров настройки, по ним определяются новые параметры. Эти параметры устанавливаются в алгоритме РАН, после чего определяются новые параметры настройки, и так до тех пор, пока новые значения параметров Кр и Ти будут близкими к текущим значениям. Обычно требуется 3-5 циклов итерации.
При настройке можно использовать одну из трех методик:
ручную оценку колебаний;
автоматический анализ колебаний;
автоматический расчет настроек.
При ручной оценке колебаний параметры колебаний оцениваются по выходу "Уе" алгоритма РАН с помощью пульта настройки ПН-1 и секундомера. Предварительно в этих алгоритмах устанавливаются настроечный коэффициент К1 и параметры Кр и Ти. Эти величины зависят от свойств объекта, заданной степени затухания и определяются по специальным графикам. (Рис. 37 для объекта 1- го порядка с запаздыванием рис. 38 для объекта 2-го порядка с запаздыванием). По замеренным значениям амплитуды Уе и периода колебаний Тк определяются новые значения параметров настройки.
|
(113) |
Для автоматического анализа колебаний используется алгоритм АНР. В этом режиме, после завершения анализа, значения амплитуды и периода колебаний считываются с соответствующих выходов. Полученные величины подставляются в (113), определяются новые значения Кр, Ти. Эти значения устанавливаются на входе алгоритма РАН и процедура повторяется командой "пуск".
Для автоматического расчета настройки на входе алгоритма АНР задаются настроечные параметры К2 и К3, определяемые из графиков (рис. 37, 38). На этих графиках используются следующие обозначения:
τ/Т – отношение запаздывания к постоянной времени объекта, полученные из передаточной функции;
τр/Тр - те же величины, полученные из кривой разгона.
Здесь предполагается, что для объекта первого порядка передаточная функция имеет вид
|
(114) |
а для объекта второго порядка
|
(115) |
Зависимость коэффициентов K1, К2, К3 от степени затухания
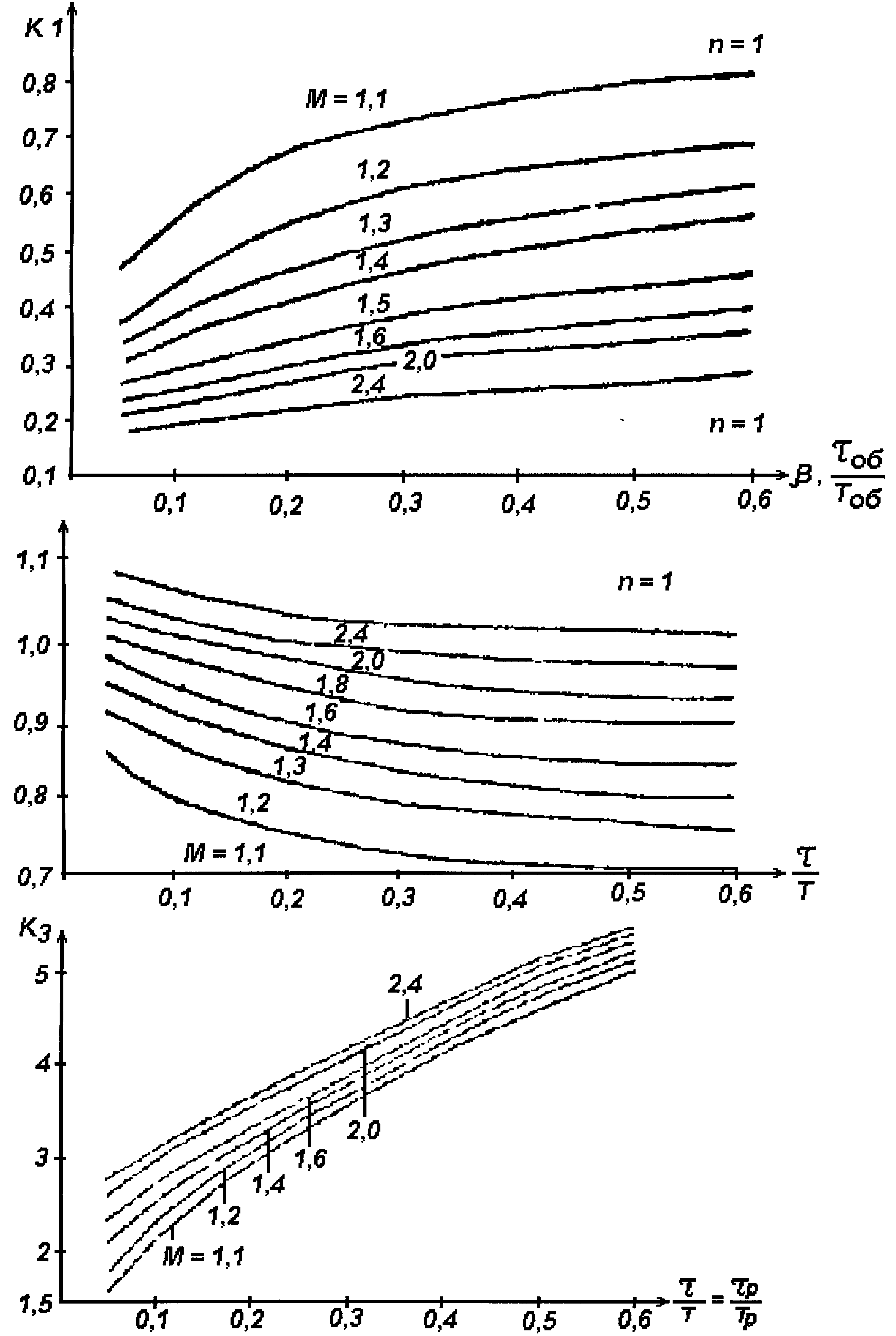
Рис. 37
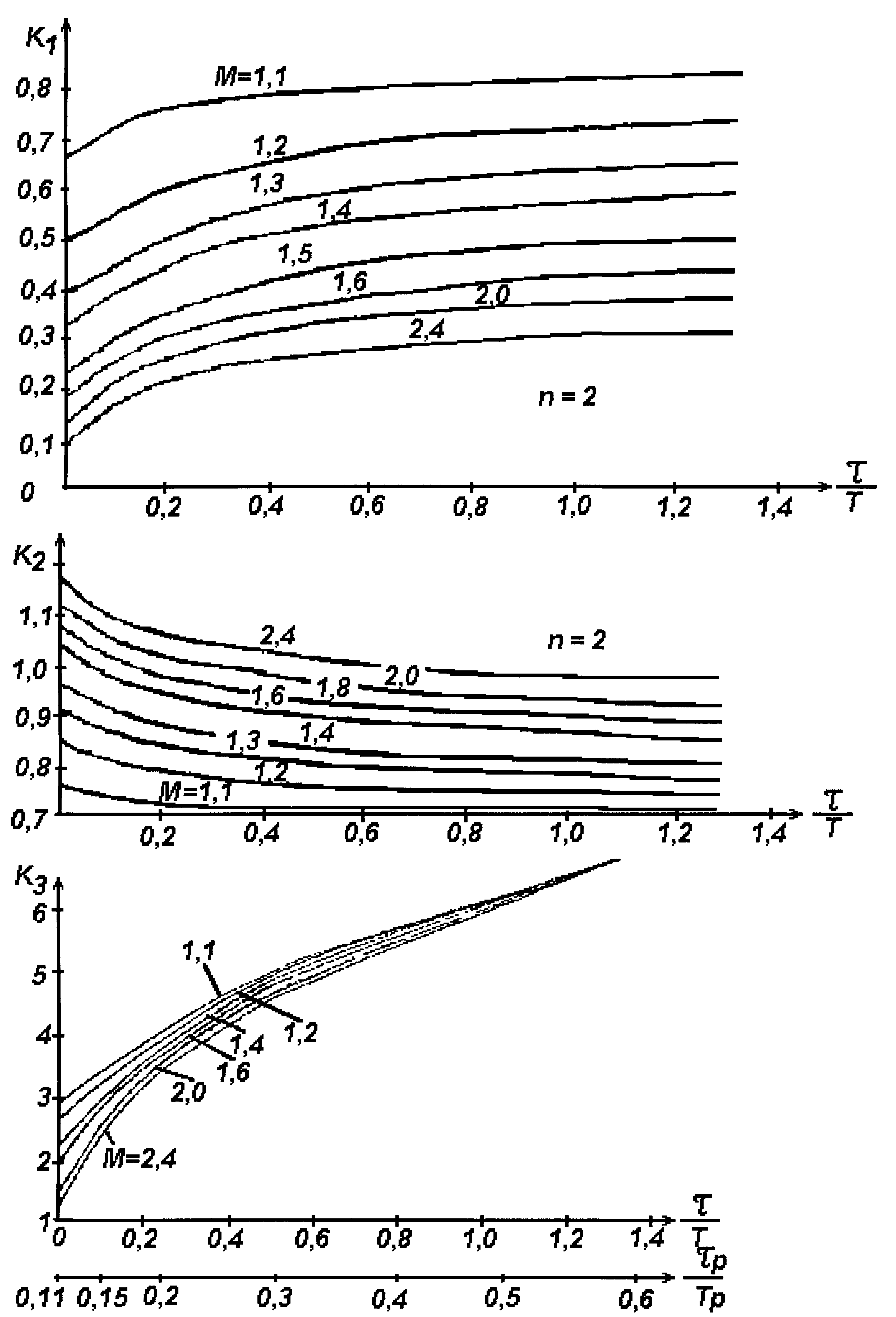
Рис. 38.
Если исходные данные об объекте отсутствуют, можно работать с начальными значениями К2 = 0.92 и К3 = 3.7, имеющимися в алгоритме АНР при его первом включении.
После пуска алгоритм АНР анализирует амплитуду и период колебаний и, используя эти параметры, рассчитывает новые значения параметров настройки, которые формируются на выходах алгоритма Кр.р и Ти.р. Эти параметры устанавливаются в алгоритме РАН, после чего в алгоритме АНР подается новая команда "пуск" и весь процесс повторяется. Новые значения действительны, когда на выходе Окон устанавливается сигнал Dкон=1.
Если новые значения Кр.р и Ти.р будут мало отличаться от предыдущих значений, на выходе алгоритма Оопт устанавливается сигнал Dопт=1, что свидетельствует о достижении оптимальной настройки. В противном случае Dопт=0.