

Содержание
1. Введение |
5 |
|
|
2. Объекты регулирования и их характеристики |
6 |
2.1. Классификация объектов регулирования |
6 |
2.2. Свойства объектов |
7 |
|
|
3. Методы определения свойств объекта |
9 |
3.1. Аналитическое описание объекта |
9 |
3.2. Определение передаточных функций по кривой разгона |
15 |
3.2.1. Снятие кривой разгона |
15 |
3.2.2. Определение передаточной функции одноемкостных объектов |
16 |
3.2.3. Определение передаточной функции двухемкостного объекта |
17 |
3.2.4. Определение передаточной функции методом последовательного логарифмирования |
18 |
3.2.5. Определение передаточной функции объекта методом площадей |
20 |
|
|
4. Выбор регулятора |
22 |
4.1. Выбор типа регулирования |
22 |
4.2. Выбор закона регулирования |
23 |
4.3. Реализация законов регулирования |
24 |
|
|
5. Оптимальная настройка регуляторов |
26 |
5.1. Критерии оптимальной настройки регулятора |
26 |
5.2. Расчет запаса устойчивости методом расширенных амплитудно – частотных характеристик |
28 |
5.2.1. П, И, ПИ - законы регулирования |
28 |
5.2.2. ПИД - закон регулирования |
29 |
5.2.3. Расчет оптимальной настройки |
29 |
5.3. Расчет запаса устойчивости по величине максимума АЧХ замкнутой системы |
32 |
5.3.1. АФХ системы с П - регулятором |
34 |
5.3.2. АФХ системы с И - регулятором |
34 |
5.3.3. АФХ системы с ПИ - регулятором |
35 |
5.3.4. АФХ системы с ПИД-регулятором |
35 |
5.3.5. Пример расчета настройки ПИ - регулятора |
36 |
5.3.6. Расчет настройки реальных ПИД - регуляторов |
38 |
5.4. Расчет настройки регуляторов в режиме диалога |
39 |
5.5. Экспериментальный метод определения настроек регулятора |
43 |
5.6. Расчет параметров настройки микропроцессорных систем автоматического регулирования |
45 |
|
|
6. Настройка регуляторов, выполненных на основе микропроцессорных контроллеров |
48 |
|
|
7. Влияние запаздывания в системе на качество регулирования |
52 |
7.1. Устойчивость систем с запаздыванием |
52 |
7.2. Компенсация чистого запаздывания |
54 |
|
|
8. Микропроцессорные контроллеры для систем автоматизации |
59 |
8.1. Ремиконты |
59 |
8.2. Ломиконты |
68 |
8.3. Димиконты |
72 |
8.4. Приборы, регулирующие программируемые микропроцессорные ПРОТАР |
73 |
8.5. Программируемый контроллер ПК-И |
76 |
|
|
Литература |
78 |
Введение
Современные системы автоматического регулирования (САР) обычно используют серийно выпускаемые промышленностью регуляторы. Структурная схема такой системы изображена на рис 1.
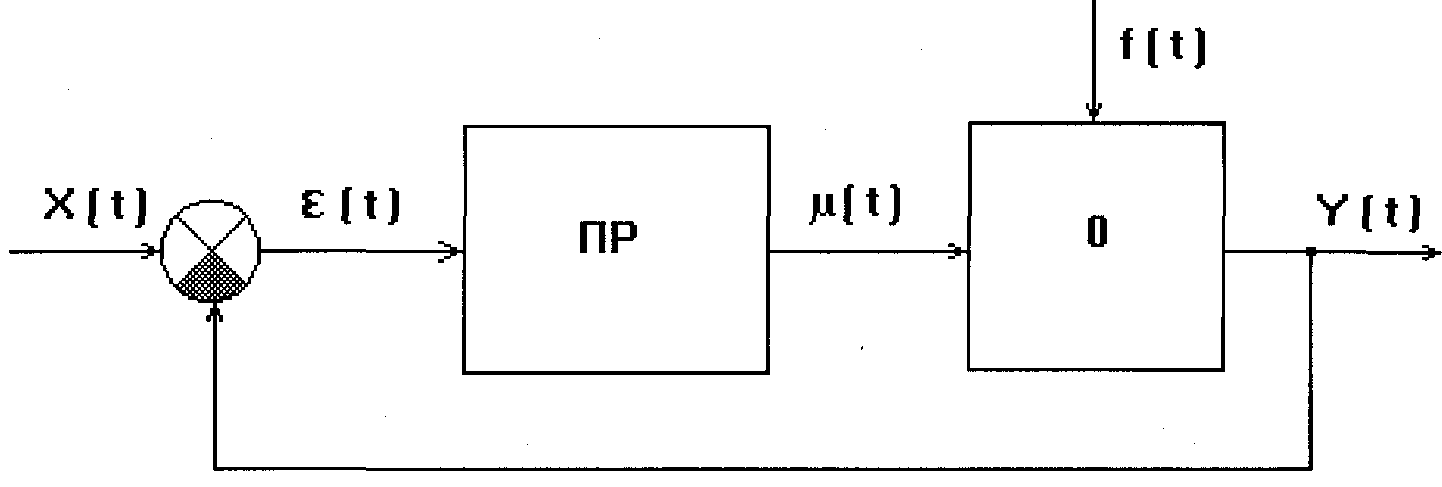
Рис.1
Здесь О – объект управления;
ПР – промышленный регулятор;
X(t) – управляющее воздействие;
Y(t) – процесс на выходе объекта;
f(t) – возмущающее воздействие;
E(t) = X(t) - У(t) – отклонение регулируемого процесса от заданного (ошибка регулирования);
μ (t) – регулирующее воздействие на объект.
Промышленные регуляторы - это универсальные устройства, предназначенные для регулирования самых разнообразных величин и объектов. Их конструкция такова, что к ним могут подключаться различные измерительные преобразователи и исполнительные механизмы. Они состоят из отдельных блоков, выполняющих конкретные операции (усиление, сложение, интегрирование и т.п.). Из этих блоков можно собрать схемы, реализующие практически любые законы регулирования. Современные промышленные регуляторы выполняются на основе микроконтроллеров.
Динамические свойства САР зависят от характеристик объекта и регулятора. Все параметры САР можно разделить на три группы:
заданные параметры, которые нельзя изменить (например, статические и динамические параметры объекта);
параметры, которые могут быть выбраны конструктором при разработке регулятора, но не могут быть изменены при настройке;
параметры, которые можно изменить при настройке (настроечные).
При разработке САР на основе промышленного регулятора возникает задача определения и установки настроечных параметров регулятора по заданным параметрам объекта. Решение этой задачи производится в следующем порядке:
- на основании сведений о регулируемом объекте, характере возмущений, управляющих воздействий и т.п. выбирается достаточно простой типовой закон регулирования;
производится расчет оптимальной настройки регулятора;
производится повторный анализ качества работы системы;
если система не удовлетворяет поставленной задаче, выбирают более сложный закон регулирования;
если и эта мера не даст удовлетворительные результаты, усложняют структуру САР (вводят дополнительные контуры регулирования, уточняют характер воздействия возмущений и т.д.).
Объекты регулирования и их характеристики
2.1. Классификация объектов регулирования
В зависимости от количества выходных величин и, соответственно, количества дифференциальных уравнений, которыми описываются процессы в объекте, различают объекты одномерные и многомерные. Например, резервуар для жидкости, (рис.2).
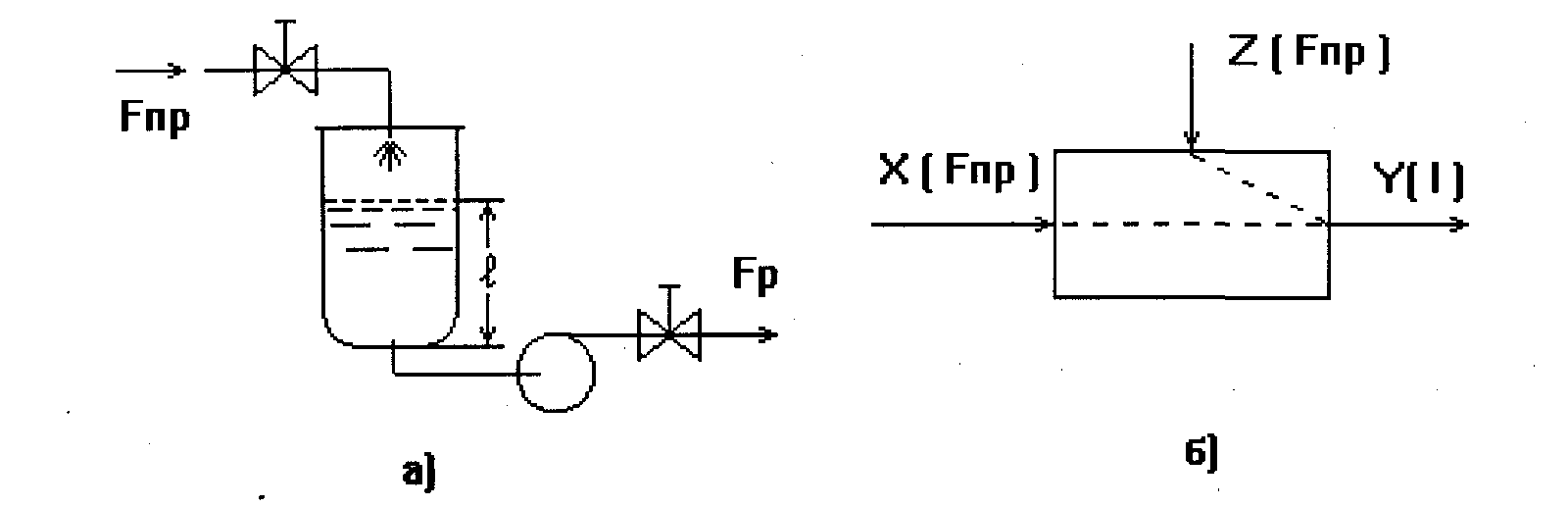
Рис.2
Входными величинами являются приход Fпp и расход Fp жидкости, а выходной величиной - уровень. Это одномерный объект. Он описывается одним уравнением статики L = f(Fпp, Fp) и одним уравнением динамики L = f(Fпp, Fp, t).
Другой пример - аппарат для выпаривания однокомпонентной жидкости при непрерывном отборе паровой фазы (рис.3)
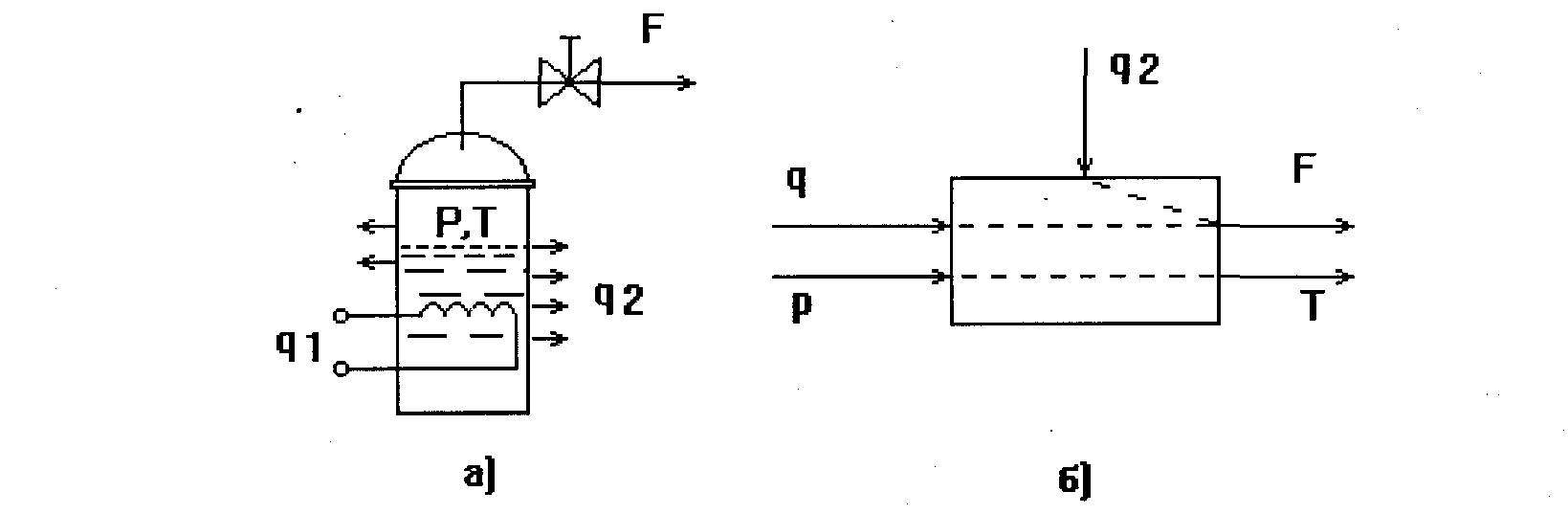
Рис.3
Тепловой поток аппарата равен разности притока тепла q1 и потерь q2. Он определяет расход пара F, т.е. изменение скорости нагрева изменяет лишь скорость образования пара. Давление же в системе Р определяется температурой процесса испарения Т. Этот объект описывается двумя уравнениями статики F = f(q1, q2), Т = f(P) и двумя уравнениями динамики F = f(q1, q2, t), Т = f(P, t).
Взаимосвязь переменных в объекте показывается на схемах динамических каналов (например, рис. 4, б).
В общем случае в многомерных объектах может проявляться взаимозависимость выходных величин. Изменения в таких объектах входных величин приводит к одновременному изменению нескольких выходных. Например, экзотермический реактор идеального перемешивания (рис.4). Реактор имеет пять входных величин - концентрация Qн и температура Тн реагентов на входе в реактор, расход реагентов F, тепло, отдаваемое из реактора системой охлаждения и определяемое расходом хладагента Fc и его температурой Тс. Выходными величинами являются концентрация продуктов реакции и температура в реакторе Т.
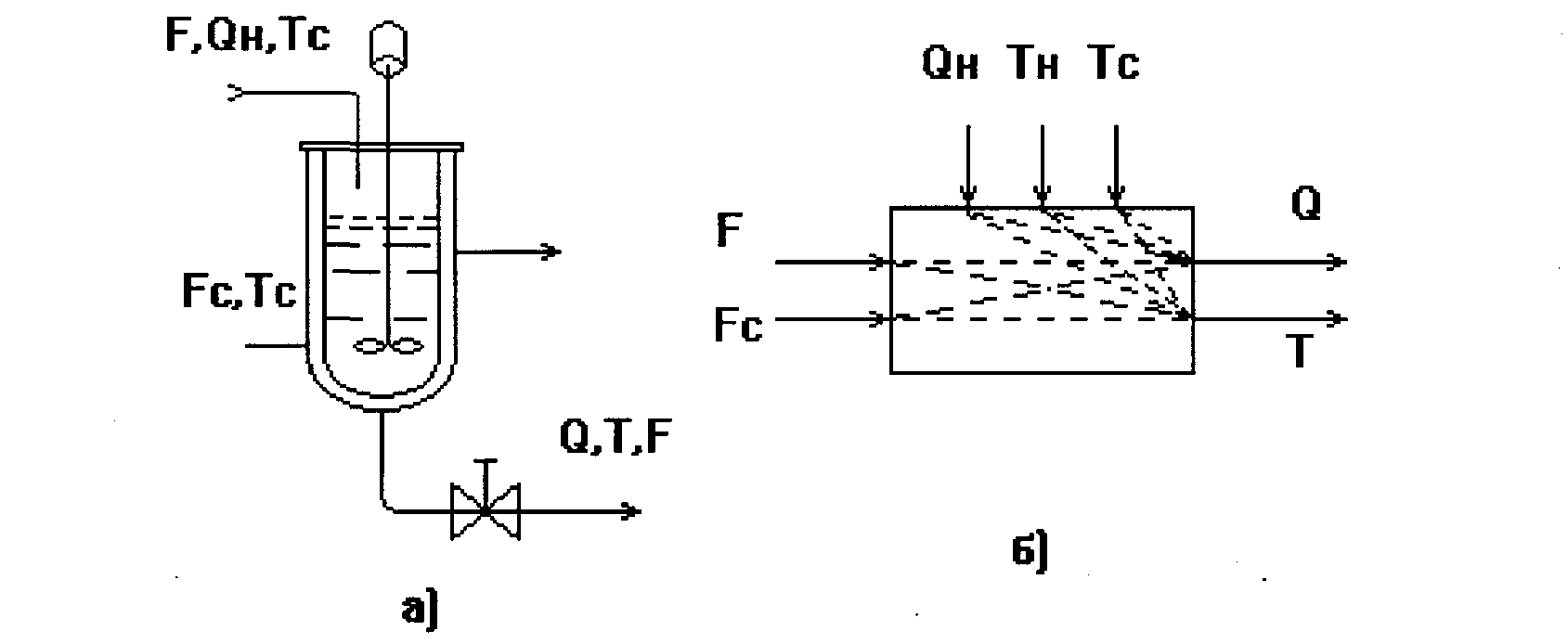
Рис.4
Для стабилизации температуры Т в реакторе изменяется расход хладагента Fc, а для обеспечения постоянства продуктов реакции Q - расход F реагентов. При этом изменение расхода Fc вызывает также изменение состава продуктов реакции Q, а колебание расхода исходных реагентов F приводит к изменению температуры в реакторе. Кроме этого, выходные величины (Q, T) зависят от концентрации Qн и Тн входного продукта, а также температуры хладагента Тс. Выходные величины такого реактора находят из уравнений динамики Q = f1(F, Fc, Qн, Tн, Tc, t), Т = f2(Fс, F, Qн, Тн, t).
2.2. Свойства объектов
Поведение САР, ее качественные характеристики во многом определяются динамическими свойствами объекта. О внутренних динамических свойствах объекта можно судить по закону изменения выходной при заданном изменении входной величины. Наиболее распространенной формой изменения входной величины при подобных исследованиях является скачкообразная форма. График изменения выходной величины объекта в результате скачкообразного входного воздействия называется переходной характеристикой. По виду характеристики различают объекты с самовыравниванием (рис.5, а) и без самовыравнивания (рис. 5, б).
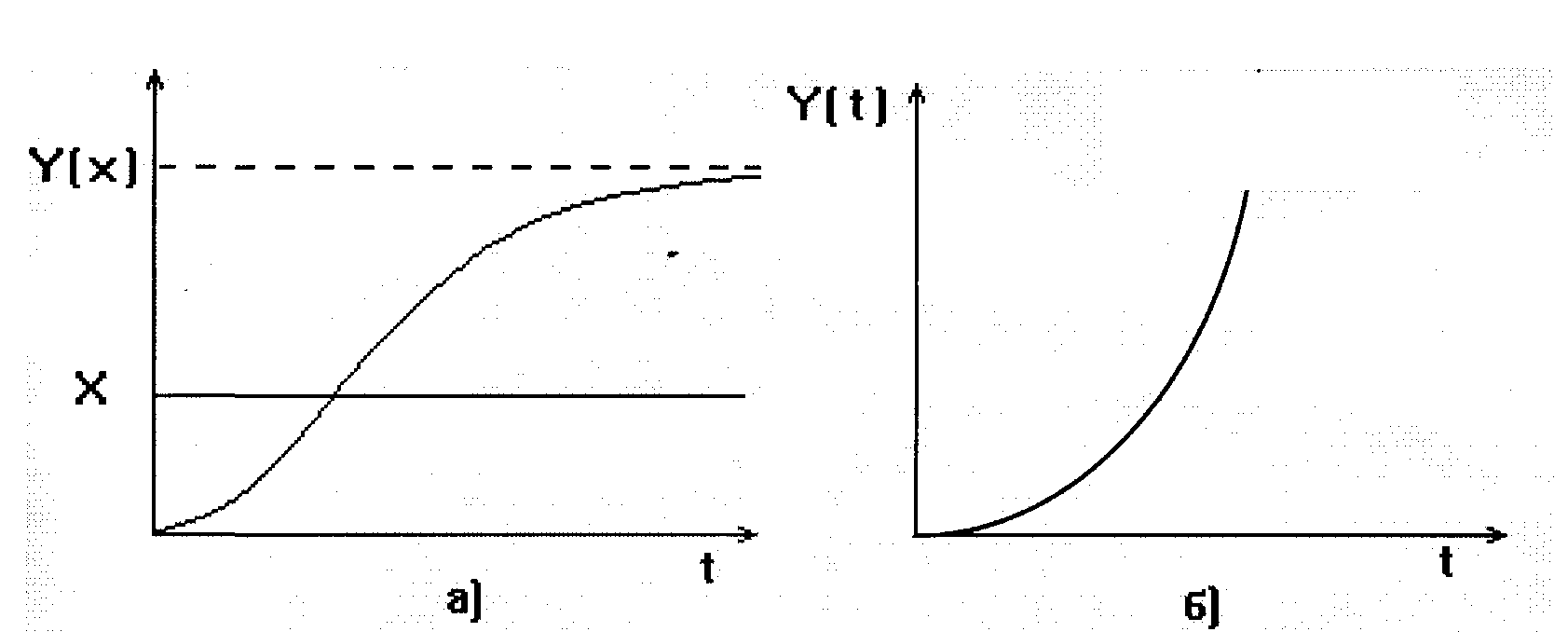
Рис.5
Самовыравнивание объекта характеризует его устойчивость. Самовыравнивание - свойство объекта самостоятельно устанавливаться в равновесное состояние после изменения входного воздействия. Количественно эта характеристика определяется степенью самовыравнивания ρ, под которым понимается отношение изменения входной величины X и изменения выходной величины по достижении объектом равновесного состояния Y.
|
(1) |
Чем больше ρ, тем меньше отклонение выходной величины от первоначального значения.
Объекты автоматического регулирования способны накапливать энергию или вещество. Количество энергии или материи, которое надо подвести к объекту или отвести от него, чтобы изменить величину регулируемого параметра на единицу измерения, называется коэффициентом емкости.
|
(2) |
Объекты регулирования могут быть одноемкостными и многоемкостными. Примеры одноемкостных объектов: резервуары и аппараты с регулируемым уровнем жидкости, аппараты с регулируемой температурой путем смешения двух жидкостей или пара и жидкости, участки трубопроводов с регулируемым давлением или расходом и т.п.
К многоемкостным относятся нагревательные печи, различные теплообменные аппараты и т.п.
Коэффициент емкости С объекта тесно связан с постоянной времени Т. Чем больше С, тем больше Т.
Все физические объекты имеют массу, а, значит, инерцию. Поэтому изменение выходного параметра начинается не одновременно с приложением воздействия, а спустя некоторое время. Это время характеризует запаздывание процесса в объекте. Запаздывание - важное свойство объектов, значительно влияющее на их динамические характеристики.