

8.1.3 Интерфейс между силовой схемой и схемой управления
Силовые схемы в PSIM представлены в виде отдельных цепей, а схемы управления – в функциональных блок-схемах. В цепи управления не допускаются компоненты силовой цепи, такие как RLC-цепи, переключатели, трансформаторы, вариометры с регулировкой взаимной индуктивности, источники тока, источники напряжения холостого хода и все типы регулируемых источников. Подобным образом в силовых цепях не допускаются такие элементы как логические элементы, пропорционально-интегральные контроллеры, справочные таблицы и другие функциональные блоки.
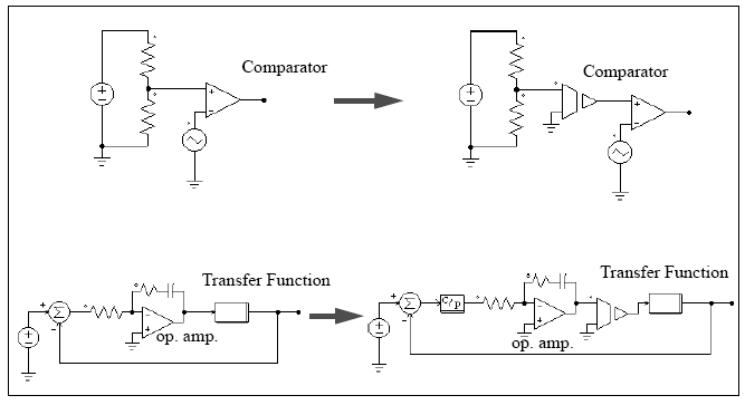
Если есть прямое соединение между силовой цепью и входом элемента цепи управления, программа автоматически вставит датчик напряжения. Таким же образом, при прямом соединении выхода элемента цепи управления с силовой цепью, автоматически добавляется блок управления сопряжением (CTOP).
Все это проиллюстрировано на примере ниже.
Следует заметить, что в PSIM силовая цепь и цепь управления решаются раздельно. Между решениями этих цепей имеется временная задержка в один шаг.
8.1.4 Бпф анализ
При использовании БПФ для гармонического анализа, необходимо убедиться, что выполнены следующие требования:
- Сигналы достигли установившегося состояния;
- отрезок данных, выбранных для БПФ должен быть кратным целому числу основного периода.
Например, для колебания 60 Гц, отрезок данных должен быть ограничен до 16.67 мс. (или кратным 16.67 мс.). В противном случае, результаты БПФ будут неверными. Данные вводятся нажатием на X-Axis в SIMVIEW, отключением Auto-scale в подзаголовке Range, определением начального и конечного времени. Анализ БПФ проводится только для данных, которые выведены на экран.
Следует заметить, что результаты БПФ определяются временным интервалом между двумя соседними расчетными точками Δt и отрезком данных Tlength. Интервал между расчетными точками Δt равен шагу моделированию, умноженному на шаг печати. В результатах БПФ шаг приращения частоты будет равен 1/ Tlength, а максимальная частота будет равна 1/(2* Δt).
Например, если взять прямоугольный сигнал в 1 Гц с отрезком данных 1 мс и интервалом между расчетными точками 10 мкс, т.е. Tlength = 1 мс, Δt = 10 мкс, то шаг приращения частоты будет: Δf = 1/ Tlength = 1 кГц. Максимальная частота будет: fmax =1/(2* Δt) = 50 кГц.
8.2 Сообщения об ошибке/предупреждения
Перечислим сообщения об ошибке/предупреждения.
E -1 Ошибочный формат ввода, возникающий при моделировании.
Такое может произойти по следующим причинам:
- неправильные/неполные технические характеристики
- ошибочный ввод целых чисел и последовательности символов
Убедитесь, что библиотека PSIM не изменена и моделирующая программа PSIM отредактирована.
В файле цепи последовательность символов должна быть заключена в апострофы (как например ‘test’). Также убедитесь, что целое число определено для целочисленной переменной. Так, определение действительного вещественного числа (как например 3. вместо 3) для целого числа повлечет сообщение об ошибке.
E - 2 Сообщение об ошибке: Узел элемента не подключен.
Это может произойти из-за плохого соединения в PSIM. Когда рисуете провод между двумя узлами, убедитесь, что он подсоединен к входу элемента.
E - 3 Сообщение об ошибке: слишком большое количество элементов.
Такая ошибка возникает, когда общее количество отдельных элементов превышает максимально допустимое количество, установленное программой. Эту проблему можно решить перекомпиляцией моделирующей программы PSIM с увеличением количества элементов. За помощью обратитесь в Powersim Technologies Inc.
W - 1 Предупреждение!!! Программа не срабатывает после 10 попыток определения позиций переключателей. Вычисление будет продолжено со следующими позициями переключателей: … …
Это предупреждение появляется, когда программа не может прийти к решению при определении позиций переключателя. Так как расчет продолжится на основании положения переключателей в конце 10-й попытки, то результаты могут быть неточными. Поэтому будьте осторожны при анализе результатов.
Существует много факторов, создающих такую проблему. Для удаления и решения проблемы можно предпринять следующее:
- Проверить цепь и убедиться в ее правильности.
- Проверить управляющие сигналы переключения.
- Подсоединить маленькие резисторы/индукторы последовательно к переключателям и источникам питания.
W - 1 Предупреждение!!! Программа не достигла стабильного состояния после 60 циклов.
Причиной этого может служить то, что система «тормозит» на определенной частоте или амплитуда сигнала слишком мала.
Можно предпринять следующее:
- Запустить моделирование во временной области с источником возбуждения на этой частоте и проверить, колеблется ли сигнал во временной области.
- Увеличить амплитуду напряжения возбуждения для получения большего уровня сигнала или
- Сократить шаг для большей точности и разрешения.