

3.1.1 Пропорциональный регулятор
Выходной сигнал пропорционального (P) регулятора равен входному сигналу, умноженному на коэффициент усиления.
Рисунок:

Характеристика:
Параметр |
Описание |
Gain |
Коэффициент усиления k передаточной функции |
3.1.2 Интегратор
Передаточная функция интегратора:
![]()
Имеются два типа интегратора: постоянный интегратор (I) и интегратор со сбросом (RESETI).
Рисунок:

Характеристики:
Параметры |
Описание |
Time Constant |
Постоянная времени T интегратора, сек. |
Initial Output Value |
Начальное значение выходного сигнала |
Reset Flag |
Флаг сброса (0: сброс по фронту ; 1: сброс по уровню) (только для RESETI) |
Выходной сигнал интегратора со сбросом может быть задан внешним управляющим сигналом (в основании блока). Для сброса по фронту (флаг сброса = 0) выходной сигнал интегратора устанавливается, равным 0 по фронту управляющего сигнала. Для сброса по уровню (флаг сброса = 1) выходной сигнал интегратора устанавливается, равным 0, пока управляющий сигнал высокий, то есть равен 1.
Чтобы избежать перенасыщения, на выходе интегратора необходимо поместить ограничитель.
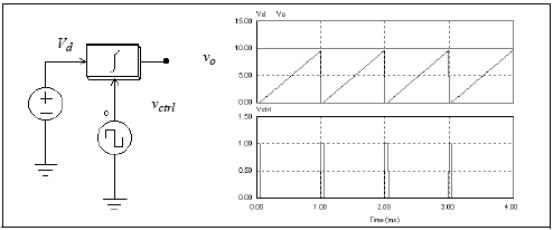
Пример:
Следующая цепь показывает использование интегратора со сбросом. Входной сигнал интегратора является величиной постоянного тока. Управляющий входной сигнал интегратора – это форма импульса, которая восстанавливает выходной сигнал в конце каждого цикла. Флаг сброса установлен на 0.
3.1.3 Дифференциатор
Передаточная функция дифференциатора:
![]()
Дифференциатор описывается уравнением:
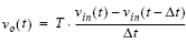
где
- такт моделирования,
![]() и
и
![]() - входные значения в данном и предыдущем
такте.
- входные значения в данном и предыдущем
такте.
Рисунок:

Характеристика:
Параметр |
Описание |
Time Constant |
Постоянная времени T дифференциатора, сек. |
Так как резкие изменения на входе приведут к появлению пика на выходе, то рекомендуется на входе дифференциатора поместить низкочастотный фильтр.
3.1.4 Пропорционально-интегральный регулятор
Передаточная функция пропорционально-интегрального (PI) регулятора определяется следующим образом:
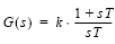
Рисунок:

Характеристики:
Параметры |
Описание |
Gain |
Коэффициент усиления k PI - регулятора |
Time Constant |
Постоянная времени T PI - регулятора, сек. |
Чтобы избежать перенасыщения, на выходе пропорционально-интегрального регулятора необходимо поместить ограничитель.
3.1.5 Встроенные фильтровые блоки
В PSIM существует четыре фильтра второго порядка в качестве встроенных модулей. Передаточные функции этих фильтров перечислены ниже.
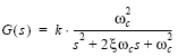
Для низкочастотного фильтра LP2 второго порядка:
Для высокочастотного фильтра HP2 второго порядка:
Для полосового фильтра BP2 второго порядка:
Для полосового режекторного BS2 фильтра второго порядка:
Рисунок:

Характеристики:
Параметры |
Описание |
Gain |
Коэффициент усиления k |
Damping Ratio |
Коэффициент затухания ξ |
Cut-off Frequency |
Частота среза
|
Center Frequency |
Средняя частота несущей
|
Passing Band (полоса пропускания); Stopping Band (полоса заграждения) |
Ширина полосы пропускания/заграждения
частот
|