2.6.4 Механическо-электрический блок сопряжения
Этот блок позволяет пользователям иметь доступ к внутренней эквивалентной схеме механической системы.
Рисунок:

Характеристика:
Параметр |
Описание |
Master/Slave Flag |
Флаг для ведущего/ведомого режимов (1: ведущий; 0: ведомый) |
Подобно электрическим машинам, механическо-электрический блок сопряжения может быть использован для определения опорного направления механической системы с помощью флага для ведущего/ведомого режимов. Когда блок сопряжения устанавливается в ведущий режим, опорное направление проходит вдоль механического вала, по направлению к остальным механическим элементам. В механической системе только одна машина/блок сопряжения должна быть установлена в ведущий режим. Обратитесь к Разделу 2.6.1.1 для подробного объяснения принципа работы флага для ведущего/ведомого режимов.
Предположим, что система привода состоит из двигателя (с развиваемым вращающим моментом и моментом инерции J1) и механической нагрузки (с моментом нагрузки Tload и моментом инерции J2). Тогда уравнение, описывающее механическую систему примет вид:
![]()
где - механическая скорость вала. В PSIM это уравнение моделируется эквивалентной схемой, изображенной ниже:
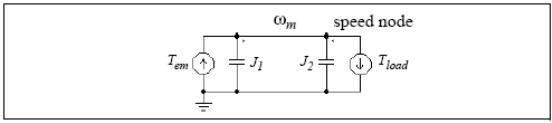
На этой схеме
присутствуют два источника тока,
принимающие значения
и Tload,
и конденсаторы со значениями J1
и J2.
Узловое напряжение относительно земли
представляет механическую скорость
.
Это аналогично выражению
![]() для конденсатора, где
для конденсатора, где
![]() ,
,
![]() ,
а
,
а
![]() .
.
В PSIM в механических эквивалентных схемах для двигателей и механических нагрузок используется модель на основе конденсатора. Механическо-электрический блок сопряжения обеспечивает доступ к внутренней механической эквивалентной схеме. Если механическая сторона блока сопряжения (обозначается “MECH”) соединяется с механическим валом, то электрическая сторона (обозначается “ELEC”) будет узлом скорости механической эквивалентной схемы. Таким образом, к такому узлу можно подключить любые электрические схемы.
С таким элементом пользователь может соединить встроенные двигатели или механические нагрузки с моделями нагрузки или двигателя, которые определяет сам.
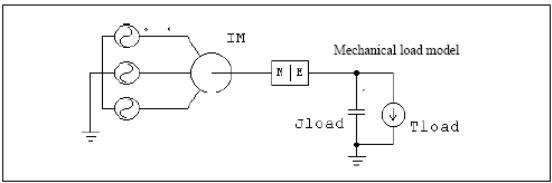
Пример: Асинхронная машина с пользовательской моделью механической нагрузки
На ниже представленной схеме показана асинхронная машина, соединенная через механическо-электрический блок сопряжения с моделью механической нагрузки, определяемой пользователем. Как объяснялось выше, напряжение на электрической стороне представляет механическую нагрузку, а конденсатор, подключенный к этому узлу – момент инерции нагрузки.
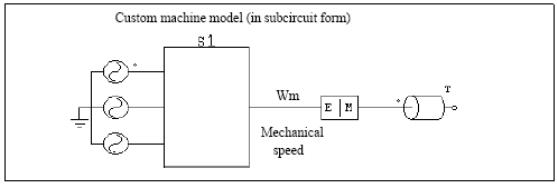
Пример: Модель собранной машины с постоянным вращающим моментом
Подобным образом в PSIM можно построить модель машины и соединить ее с механической нагрузкой. Такая схема изображена на рисунке. Модель собранной машины должна быть аналогична конденсаторной модели, чтобы моделировать уравнение механики. Узел, представляющий механическую скорость, затем становится доступным и подключается к электрической стороне механическо-электрического блока сопряжения.