

2.6.1.5 Синхронная машина с внешним возбуждением
Структуру традиционной синхронной машины составляют три обмотки статора, одна обмотка возбуждения на роторе и дополнительные демпферная обмотка на роторе.
В зависимости от способа, с помощью которого внутренняя модель согласуется с внешней схемой статора, различают два типа взаимодействия: 1) взаимодействие по напряжению (SYNM3), 2) взаимодействие по току (SYNM3_I). Первая модель состоит из регулируемого источника напряжения со стороны статора, также такая модель подходит в том случае, когда машина работает как генератор и/или когда внешняя цепь статора последовательно соединена с индуктивными отводами. А другая модель включает регулируемый источник тока со стороны статора и данная модель подходит в случае, когда машина работает как электродвигатель и/или когда внешняя цепь статора соединена параллельно с емкостными элементами.
Изображение и параметры машины показаны ниже.
Рисунок:

Составляюшие:
Параметры |
Описание |
(stator) |
Сопротивление обмотки статора, Ом |
(stator) |
Индуктивность рассеяния статора, Гн |
|
Индуктивность намагничивания по d-оси, Гн |
|
Индуктивность намагничивания по q-оси, Гн |
|
Сопротивление обмотки возбуждения, Гн |
|
Индуктивность рассеяния обмотки возбуждения, Гн |
|
Сопротивление ротора по оси d, Ом |
|
Индуктивность рассеяния ротора по оси d, Гн |
|
Сопротивление ротора по оси q, Ом |
|
Индуктивность рассеяния ротора по оси q, Гн |
Ns/Nf (эффективное) |
Коэффициент эффективности трансформации статорной обмотки возбуждения (только для машины с фазным ротором) |
Number of Poles P |
Количество полюсов P |
Moment of Inertia |
Момент инерции J машины, |
Torque Flag |
Флаг для электромагнитного момента |
Master/Slave Flag |
Флаг для ведущего/ведомого режимов (1: ведущий; 0: ведомый) |
Все параметры относятся к статору.
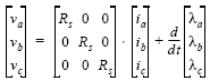
Уравнения синхронной машины могут быть выражены следующим образом:
![]()
где
а
![]() .
Матрица индуктивности определяется
как:
.
Матрица индуктивности определяется
как:
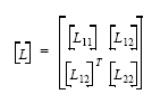
и
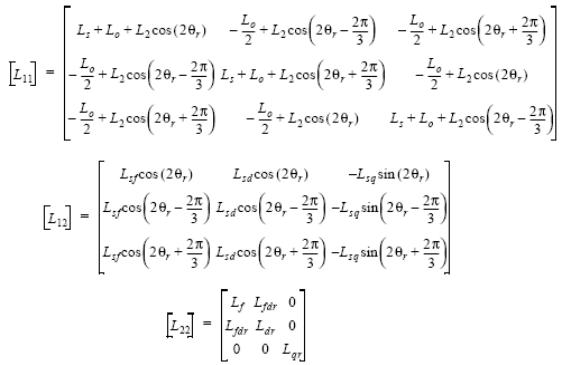
где – угол поворота ротора.
Развиваемый вращающий момент выражен как:
![]()
Уравнения механики:
![]()
![]()
2.6.1.6. Синхронная машина с постоянным магнитом
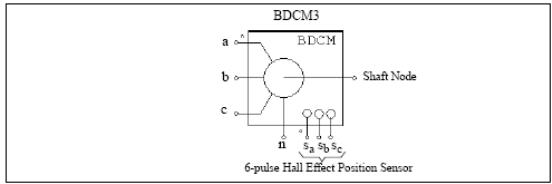
У трехфазной магнитоэлектрической машины имеются трехфазные обмотки на статоре и постоянный магнит на роторе. Отличие между этой машиной и бесщеточной машиной постоянного тока состоит в том, что противоэдс является синусоидальной.
Изображение и параметры машины показаны ниже.
Рисунок:
Характеристики:
Параметры |
Описание |
|
Сопротивление обмотки статора, Ом |
|
Индуктивность статора по d-оси, Гн |
|
Индуктивность статора по q-оси, Гн Координаты d-q определяются тем, что d-ось проходит через центр магнита, а q-ось проходит посередине между двух магнитов. Таким образом, q-ось опережает d-ось. |
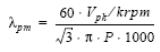
Vpk / krpm |
Константа максимальной обратной ЭДС, V / krpm (механическая скорость) Значение Vpk / krpm доступны в списке технических данных машины. Если же они отсутствуют, то их можно получить экспериментальным путем, а именно запустив машину как генератор с частотой вращения 1000 об/мин, и измерив максимум линейного междуфазного напряжения. |
No. of Poles |
Количество полюсов P |
Moment of Inertia |
Момент инерции J машины, |
Torque Flag |
Флаг для электромагнитного момента . Когда флаг установлен на 1, требуется вывод ЭМ момента. |
Master/Slave Flag |
Флаг для ведущего/ведомого режимов (1: ведущий; 0: ведомый) |
Выводы a, b, c, являются зажимами обмотки статора для фаз a, b, c. Обмотки статора соединены в Y, а вывод n является нейтральной точкой. Вывод вала – это соединительный зажим для механического вала. Все эти узлы являются силовыми и должны подключаться к силовой цепи.
Уравнения для магнитоэлектрической машины:
где
,
,
-
фазные напряжения;
,
,
-
фазные токи;
![]() ,
,![]() ,
,![]() -
потокосцепление статора; а Rs
- сопротивление фазного статора.
Потокосцепление далее определяется
следующим образом:
-
потокосцепление статора; а Rs
- сопротивление фазного статора.
Потокосцепление далее определяется
следующим образом:

где
-
электрический угол поворота ротора,
![]() -
который определяется как:
-
который определяется как:
где P – количество полюсов.
Самоиндукция и взаимная индуктивность статора зависят от положения ротора и определяются как:
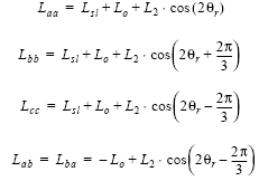
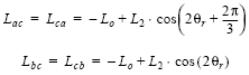
где Lsl – индуктивность рассеяния. Индуктивности по d-оси и q-оси связаны с выше представленными индуктивностями следующим образом:
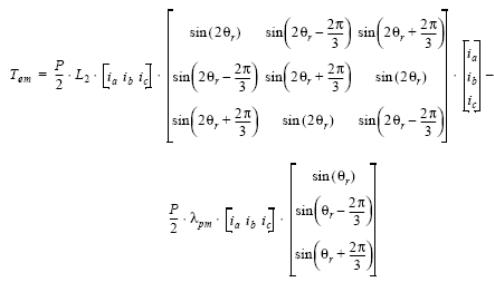
Развиваемый вращающий момент может быть выражен как:
Уравнения механики:
где B – коэффициент, - момент нагрузки, P - количество полюсов. Коэффициент B рассчитывается из момента инерции J и механической постоянной времени τmech, как показано ниже: