2.6.1.3 Асинхронная машина с насыщением
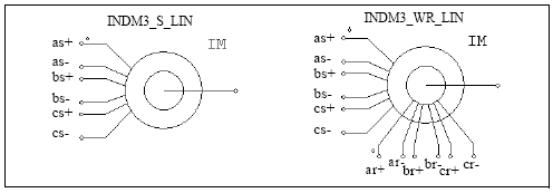
Представлены две модели асинхронных машин с насыщением:
- трехфазная асинхронная машина с короткозамкнутой обмоткой ротора (INDM3_S_NON);
- трехфазная асинхронная машина с фазным ротором (INDM3_WR_NON).
Рисунок:
Характеристики:
Параметры |
Описание |
(stator) |
Сопротивление обмотки статора, Ом |
(stator) |
Индуктивность рассеяния обмотки статора, Гн |
(rotor) |
Сопротивление обмотки ротора, Ом |
(rotor) |
Индуктивность рассеяния обмотки ротора, Гн |
Ns/Nr Turns Ratio |
Коэффициент трансформации статорной и роторной обмоток (только для машины с фазным ротором ) |
No. of Poles |
Количество полюсов P машины (четное целое число) |
Moment of Inertia |
Момент инерции J машины, |
Torque Flag |
Выходной флаг для электромагнитного момента ( ). Когда флаг установлен в 1, выводится ЭМ момент. |
Master/Slave Flag |
Флаг для ведущего/ведомого режимов (1: ведущий; 0: ведомый) |
Im v.s. Lm (Im1, Im1) |
Параметры намагничивающего тока в сравнении с индуктивностью намагничивания [(Im1, Im1) (Im2, Im2)…] |
Все параметры относятся к статору.
Работа 3-х фазной асинхронной машины с насыщением описывается следующими уравнениями:
![]()
![]()
где


В этом случае индуктивность Msr уже не постоянная величина, а функция намагничивающего тока Im.
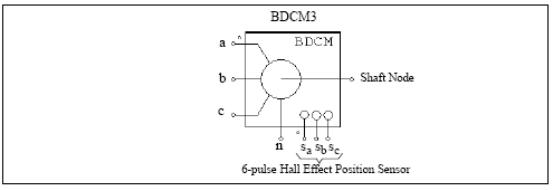
2.6.1.4 Бесщеточная машина постоянного тока
3-х фазная бесщеточная машина постоянного тока является видом синхронной машины с постоянным магнитом и противо ЭДС трапецеидальной формы. Она имеет трехфазную обмотку на статоре и постоянный магнит в роторе. Изображение и параметры 3-х фазной бесщеточной машины постоянного тока показаны далее.
Рисунок:
Характеристики:
Параметры |
Описание |
R (stator resistance) |
Сопротивление фазы статора R, Ом |
L (stator self.ind.) |
Самоиндукция фазы статора L, Гн |
M (stator mutual ind.) |
Взаимная индуктивность статора M, Ом Взаимная индуктивность M является отрицательной величиной. В зависимости от структуры обмотки, отношение между M и самоиндукции L обычно лежит в интервале между -1/3 и -1/2. Если M неизвестно, то по умолчанию используют значение равное -0.4∙L. |
Vpk / krpm |
Константа максимальной противо ЭДС, V / krpm (механическая скорость) |
Vrms / krpm |
Константа среднеквадратичного значения противо ЭДС, V / krpm (механическая скорость) Значения Vpk / krpm и Vrms / krpm доступны в списке технических данных машины. Если же они отсутствуют, то их можно получить экспериментальным путем, а именно запустив машину как генератор с частотой вращения 1000 об/мин, и измерив максимум и среднеквадратическое значение линейного междуфазного напряжения. |
No. of Poles |
Число полюсов P |
Moment of Inertia |
Момент инерции J машины, |
Mech. Time Constant |
Механическая постоянная времени
|
theta_0 (deg.) |
Начальный угол ротора
Начальный угол ротора – это угол при t=0. Нулевым положением является точка, в которой Фаза А противо ЭДС пересекает ноль (от отрицательного к положительному) при скорости вращения выше нуля. |
theta_advance (deg.) |
Угол опережения позиционного датчика
Угол опережения – это разница между углом 30° (угол включения Фазы А верхнего переключателя и углом 120° в режиме проводимости). Например, если Фаза включена при 30°, то угол опережения будет равен 5° (т.е. 30-25=5). |
Conduction Pulse Width |
Длительность импульса проводимости позиционного датчика, эл.гр. Положительный импульс проводимости может включить верхний переключатель, а отрицательный импульс – нижний переключатель в инверторе с полным мостом. Длительность импульса проводимости равна 120 эл.гр. (для режима проводимости). |
Torque Flag |
Флаг для развиваемого электромагнитного момента (1: вывод; 0: вывода нет) |
Master/Slave Flag |
Флаг для ведущего/ведомого режимов (1: ведущий; 0: ведомый) Флаг задает режим работы машины. Подробное объяснение см. в Разделе 2.6.1.1. |
Назначения узлов a, b, c, изображенных на рисунке состоит в том, что они являются зажимами обмотки статора для Фаз A, B, С. Обмотки статора соединены в Y, а узел n является нейтральной точкой. Вывод вала – это соединительный зажим для механического вала. Все эти узлы являются силовыми и должны подключаться к силовой цепи.
Узлы sa, sb и sc – выходы встроенного 6-импульсного датчика Холла, соответствующие Фазам A, B, С. Выходной датчик – это биполярный коммутационный импульс (1, 0, -1). Все выводы выходного датчика являются управляющими и должны быть подключены к управляющей цепи.
Уравнения для бесщеточной машины:
![]()
![]()
![]()
где
![]() ,
,
![]() и
и
![]() -
фазные напряжения;
-
фазные напряжения;
![]() ,
,![]() ,
,![]() -
фазные токи; R,
L,
M
- сопротивление, самоиндукция и взаимная
индуктивность фазного статора,
-
фазные токи; R,
L,
M
- сопротивление, самоиндукция и взаимная
индуктивность фазного статора,
![]() ,
,![]() ,
,![]() -
обратные ЭДС для Фаз A,
B
и
С.
-
обратные ЭДС для Фаз A,
B
и
С.
Противо ЭДС является
функциями механической скорости
![]() и электрического угла
и электрического угла
![]() ротора,
то есть:
ротора,
то есть:
![]()
![]()
![]()
Коэффициенты
![]() ,
,
![]() ,
,![]() зависят
от угла
.
В данном случае предполагается идеальный
трапецеидальный сигнал, как показано
ниже для Фазы A.
Указан и ток
Фазы A.
зависят
от угла
.
В данном случае предполагается идеальный
трапецеидальный сигнал, как показано
ниже для Фазы A.
Указан и ток
Фазы A.
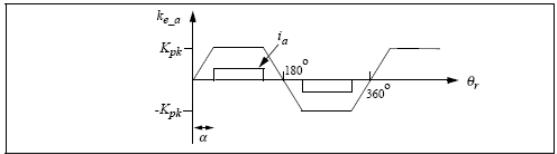
где
![]() -
максимальное значение трапецеидального
сигнала, выраженное в V/(рад/сек),
и определяется по формуле:
-
максимальное значение трапецеидального
сигнала, выраженное в V/(рад/сек),
и определяется по формуле:
![]() .
Если значения Vpk
/ krpm
Vrms
/ krpm,
то угол α определяется автоматически.
.
Если значения Vpk
/ krpm
Vrms
/ krpm,
то угол α определяется автоматически.
Развиваемый вращающий момент машины:
![]()
Уравнения механики:
![]()
![]()
где B
– коэффициент,
![]() -
момент нагрузки, P
- количество полюсов. Коэффициент B
рассчитывается из момента инерции J
и механической постоянной времени
τmech,
как показано ниже:
-
момент нагрузки, P
- количество полюсов. Коэффициент B
рассчитывается из момента инерции J
и механической постоянной времени
τmech,
как показано ниже:
![]()
Дополнительные пояснения по работе датчика Холла:
Позиционный датчик Холла состоит из набора переключателей и триггерных магнитов.
Переключатель на эффекте Холла – это полупроводниковый переключатель (например, MOSFET или БПТ), который открывается или закрывается, когда магнитное поле выше или ниже определенного порогового значения. Принцип работы основывается на эффекте Холла, при котором генерируется ЭДС, пропорциональная плотности потока, при прохождении через переключатель тока от внешнего источника. ЭДС можно обнаружить, используя схему формирования сигнала, встроенную в переключатель на эффекте Холла или смонтированную близко к нему. Это обеспечит импульс, совместимый с TTL-схемами. Импульс имеет четкие границы, а также высокую помехозащищенность при соединении с контроллером посредством экранированного кабеля. Для трехфазного вентильного двигателя имеются три переключателя, расположенные относительно друг друга под углом в 120° и смонтированные на корпусе статора.
Набор триггерных магнитов может состоять из отдельных магнитов, или с использованием роторных магнитов вентильного двигателя. Если используются отдельные триггерные магниты, то они должны иметь соответствующие межполюсные интервалы (с учетом роторных магнитов) и располагаться на валу в непосредственной близости от переключателя. Если же используются роторные магниты, то переключатели должны монтироваться достаточно близко к магнитам, где они будут возбуждаться потоком рассеяния при соответствующих положениях ротора.
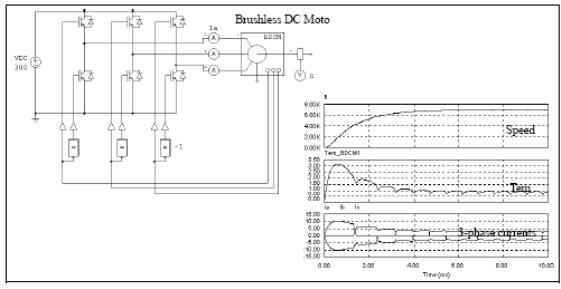
Пример: Запуск вентильного двигателя в разомкнутой системе
Рисунок, приведенный ниже, показывает систему вентильного двигателя без обратной связи. Электродвигатель подпитывается от 3-фазного инверторного источника напряжения. Выводы датчиков Холла служат в качестве управляющих сигналов для инвертора, выдавая в результате 6 импульсов.
Моделирование показывает переходной процесс при запуске: механическую скорость (об/мин), развиваемый момент Tem и 3-фазный входной ток.