

1.. Типовые статич-е нагрузки эп-да. Мех-е переходные процессы при акт-м и реак-ном х-ре нагрузки.
Кроме электромагнитного м-нта на мех-скую часть ЭП-да действуют статические нагрузки, которые делятся на силы и моменты механических потерь и силы и моменты полезных нагрузок исполнительных механизмов:
 где
1ая составл-щая суммы явл-ся суммарными
потерями в двигателе и в исполнит-м
механизме, а 2ая – суммарным приведённым
м-нтом полезной нагрузки. По хар-ру
взаимод-я с ЭП-дом разл-ся активные и
реактивные силы и моменты.
где
1ая составл-щая суммы явл-ся суммарными
потерями в двигателе и в исполнит-м
механизме, а 2ая – суммарным приведённым
м-нтом полезной нагрузки. По хар-ру
взаимод-я с ЭП-дом разл-ся активные и
реактивные силы и моменты.
1. Вентилят-я нагрузка. Все эл-нты движутся с одинак-й скор-ю. На раб/колесе возникает сопр-е дв-ю, завис-щее от скорости. Общее сопр-е механизма:

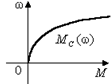
Где
 - номин-й момент вентилятора,
- номин-й момент вентилятора,
 - номин-я скорость вентилятора.
- номин-я скорость вентилятора.
2. механизмы с постоянной нагрузкой. Рассмотрим ЭП шпинделя токарного станка.
Взаимод-е
резца и заготовки возник-т сила резания:
 .
В процессе обработки заготовки остается
постоянный момент и не зависит от
скорости. Момент зависит от радиуса
заготовки.
.
В процессе обработки заготовки остается
постоянный момент и не зависит от
скорости. Момент зависит от радиуса
заготовки.
3. механич-я х-ка, расп-я в правой части систем координат 1 и 4 квадранты. Причем М = const. Двигатель вращает барабан, который перемещает груз. Нагрузкой является сила тяжести груза. Особен-сть этой нагрузки – она всегда направлена в сторону спуска и не зависит от его перемещения.
А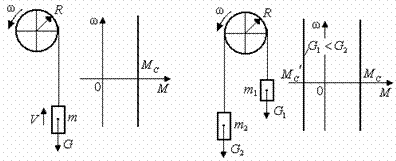 ктивными
силами и м-ми наз-ся силы и моменты,
величина и направление которых не
зависит от движения электропривода;
например, силы и моменты, создаваемые
перемещаемым по вертикали грузом.
Механич-я хар-ка такого вида статической
активной нагрузки изображена на рис.
ктивными
силами и м-ми наз-ся силы и моменты,
величина и направление которых не
зависит от движения электропривода;
например, силы и моменты, создаваемые
перемещаемым по вертикали грузом.
Механич-я хар-ка такого вида статической
активной нагрузки изображена на рис.
a)
![]()
б)
![]()
Рис.Акт-е нагрузки ЭП-да неуравновеш-го (а) и уравновеш-го (б) подъемных механизмов.
В зав-сти от соотношения масс m1 и m2 двигатель работает в тормозном ( m1m2) или двигательном (m1m2) режимах.
С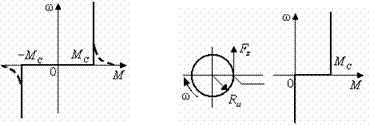 илы
и моменты, возникающие как реакции на
движение электропривода, называются
реактивными. Направление их всегда
противоположно направлению движению
электропривода. По характеру зависимости
от скорости реактивных сил и моментов
различают нагрузки типов сухого трения
(рис. 2.6):
илы
и моменты, возникающие как реакции на
движение электропривода, называются
реактивными. Направление их всегда
противоположно направлению движению
электропривода. По характеру зависимости
от скорости реактивных сил и моментов
различают нагрузки типов сухого трения
(рис. 2.6):
a)

б)
Рис.2.6. Реакт-е нагрузки: сухое трение (а) и момент резания (б).
В момент трогания силы сухого трения могут превышать свои значения при движении (рис. 2.6а).
Силы и моменты вязкого трения зависят от скорости линейно
(рис. 2.7):

![]()
Рис. 2.7. Момент нагрузки типа вязкого трения.
Момент внутреннего вязкого трения:
![]()
где w1 и w2 – скорости на вх и вых деформируемого элемента.
По хар-ру влияния на механические колебания все силы и моменты делятся на консервативные и диссипативные.
При действии консервативных сил и моментов не происходит поглощение колебаний. Например, сила тяжести является консервативной силой, т. к. работа, осуществляемая этой силой за период колебаний, всегда равна нулю. При действии диссипативных сил происходит поглощение энергии колебаний.
2.. Расчетные схемы мех-й части эп-да. Приведение м-нта сопротивления, м-нта инерции, жесткости к валу дв-ля.
Приведение момента сопротивл-я
Т.к.
мощ-сть расчетной схемы и реал-й д.б.
одинаковая, то условие равенства
мощностей:

Где
 – передаточное соотношение.
– передаточное соотношение.


Если движение поступательное механич-й части:

 ,
,
где
 разность
привед-я. Если необх. учесть потери на
трение, то
разность
привед-я. Если необх. учесть потери на
трение, то

Приведение моментов инерции. Приведение происходит исходя из сохранения кинет-й энергии мех/сист. при переносе момента инерции на вал двигателя.
Для
поступ-го:
 /
При привед-и мом-тов инерции потери
учитывать не следует, т.к. кинет-я энергия
с потерями не связана. Общий м-нт инерции
при жесткой связи дв-ля и механизма:
/
При привед-и мом-тов инерции потери
учитывать не следует, т.к. кинет-я энергия
с потерями не связана. Общий м-нт инерции
при жесткой связи дв-ля и механизма:

Приведение жесткости. Усл-е приведения: рав-ство потенц-х энергий реал-х и привд-х схем.
Для
поступательного движения:
3. МЕХ-Я ЧАСТЬ ЭП-ДА КАК ОУ (НА ПРИМЕРЕ ДВУХМАС-ОЙ МОДЕЛИ).
Мат/модель и составленная на ее основе схемой является основой для анализа объекта. На основании схемы можно получить след-е ур-ние:
2)
3)

Из
3) получим:
 ,
где
,
где
 ,
,

Получ-я сист – матем-я модель ДМС. На основании системы можно составить структ-ю схему:
Перепишем систему ур-ний в операторной форме:
Опр-м Ww1w2(p) замкнутого контура:
Опр-м
C
ОС:

Закон изменения скорости нагрузки:
4.. МЕХ-Е ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ЛИН-Х ЗАВ-СТЯХ M(w) ДВИГАТЕЛЯ И MC(w)
Изменение управляющего или возмущающего воздействия вызывают в динамич-кой системе переходные процессы. В этом случае момент вращения становится не равен моменту сопротивления, возникает динам-й момент:
Из
постановки вытекает, что
 также линейно зависит от скорости w.
Опишем х-ки ур-ми. Введем понятие жесткости
мех-ской хар-ки:
также линейно зависит от скорости w.
Опишем х-ки ур-ми. Введем понятие жесткости
мех-ской хар-ки:

 (1)
(1)
M
– Mc = J (2)
(2)
J



 начальных
условий при t
= 0
начальных
условий при t
= 0
А
=


Закон изменения момента двигателя во времени:

Учитывая значение жесткости.


Время переходного процесса – время, за которое изменяется скорость от начальной до конечной (момента).