Схемы
Управление топливным насосом (рис. 76.4)
Автоматическое управление динамическим торможением АЭД (рис. 87.4)
Электропривод дистанционной отдачи якоря (рис. 100.4)
Контакторное управление электропривода грузового лифта (рис. 102. 4)
Электропривод шлюпочной лебедки (рис.103. 4)
Электропривод буксирной лебедки типа ЭЛБ – 1,5/12 (рис. 105. 4)
Дистанционное управление пуском ЭП насоса (рис 106)
Управление электропривода компрессора с реле давления РД - 13(рис. 107. 4)
Управление работой котла КОАВ – 200 (рис. 108. 4)
Управление электропривода шибера утилизационного котла КУВ – 100 ( рис. 109.4)
Электрооборудование станции питьевой воды «Озон – 4»
ЭП вентилятора 90ЦС – 24 насосного отделения танкера проекта № 1577 (рис. 121.4)
ЭП зачистного насоса танкера проекта 1577 (рис. 122.4)
Управление ГЭУ д/э типа «Россия» ( рис. 127.4)
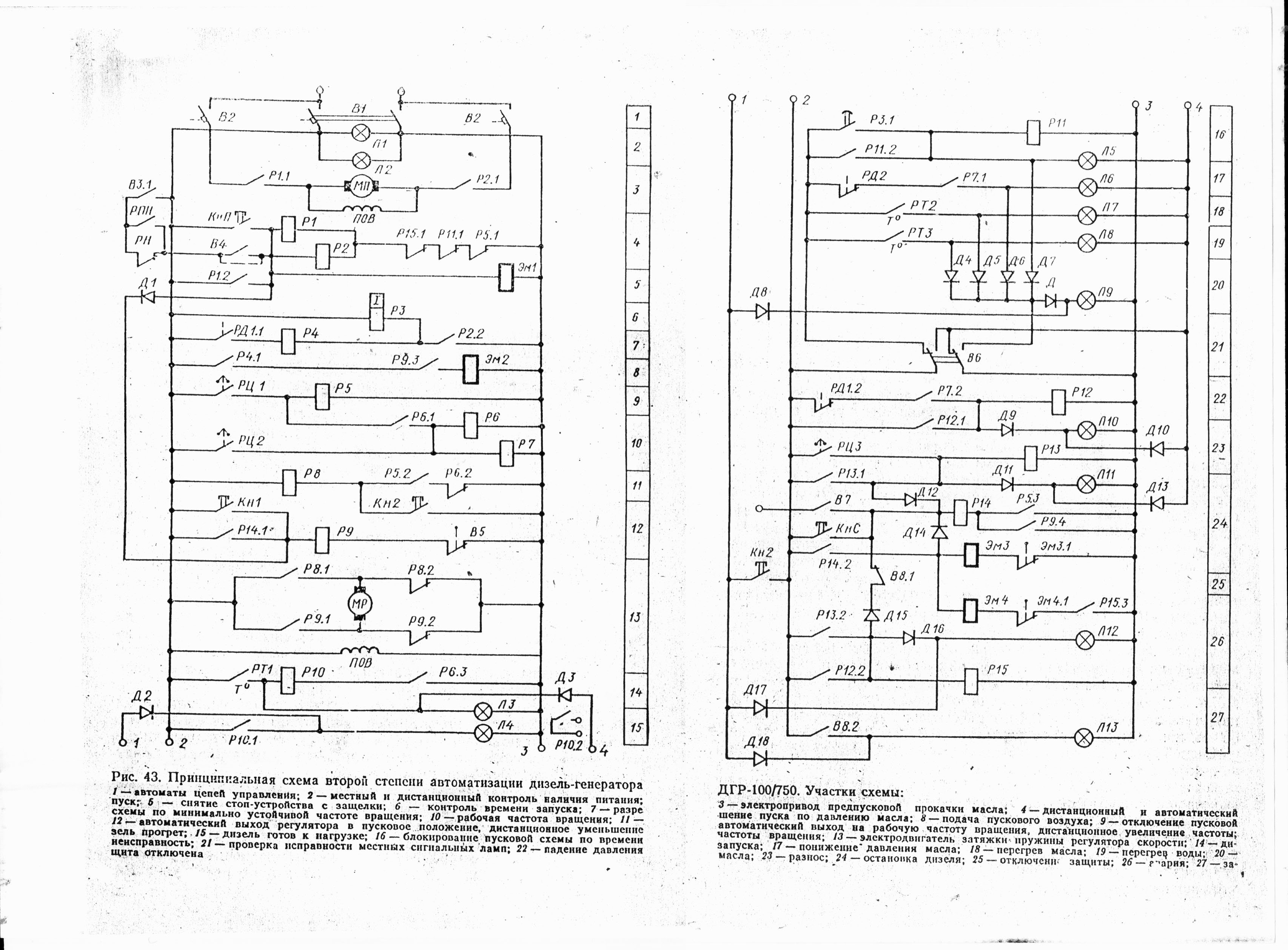
Система автозапуска ДГ ДГР 100/ 750 (рис. 43 4)
Схема коммутатора СОО (рис. 136.4)
Схема светоимпульсной отмашки СИО – 220 (рис. 137.4)
Схема зарядного устройства от судовой сети постоянного тока (рис. 30.4)
Принципиальная схема автоматического электростартерного пуска ДГ – 25 (рис. 42.4)
Схема динамического торможения асинхронного электродвигателя (рис. 90 С)
Схема системы Г – Д с двухобмоточным генератором ( рис. 42.4)
Схема управления электропривода насосов рулевой машиной (Головин стр. 262 рис. 164)
Следящая система рулевого электропривода с потенциометрическим управлением (рис. 100 с)
Схема электрогидравлического рулевого привода (рис. 102 С)
Схема управления электропривода подруливающего устройства теплохода проекта №588 (рис. С)
Схема контакторного управления электропривода грузовой лебедки на переменном токе (рис. 110 С)
Схема пуска пожарного насоса переключением со «звезды» на «треугольник» (рис. 112 С)
Схема автоматического управления электропривода санитарного насоса (рис. 111 С)
Схема автоматического управления компрессора (рис. 113. С)
Схема автоматического управления котла типа КОАВ (рис. 114 С)
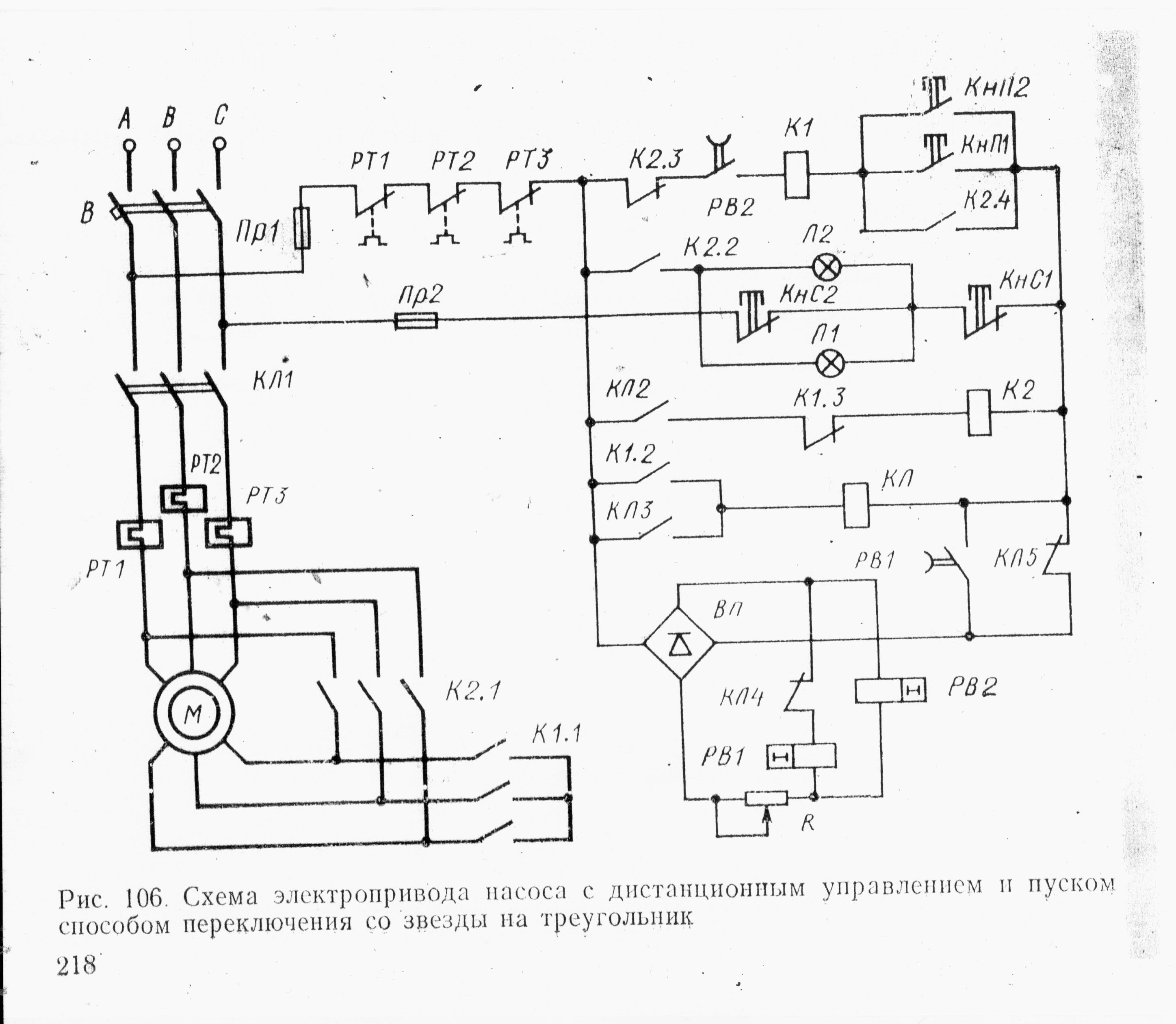
Работа схемы электропривода насоса с дистанционным управлением и пуском способом переключения со звезды на треугольник.
Схема обеспечивает пуск и остановку двигателя М с дистанционного поста (ходовой рубки) кнопками управления КнП2, КнС2 и с местного поста кнопками КнП1,КнС1. Для ограничения пускового тока используется переключение обмоток статора двигателя со звезды на треугольник. Во время эксплуатации судна автомат В постоянно включен, выпрямитель Вп находится под напряжением, следовательно катушка реле времени РВ1 и РВ2 тоже получают питание, а их контакты РВ1(в цепи выпрямителя) и РВ2(в цепи контактора «звезды» К1) замкнуты.
При нажатии КнП1(КнП2) замыкается цепь питания контактора К1(«звезда»), который замыкает цепь статора «звездой» (К1.1), контакт К1.2 замкнется в цепи линейного контактора КЛ и разомкнется контакт К1.3 в цепи катушки контактора К2 («треугольник»). КЛ сработав – подключит электродвигатель М к сети (работает на «звезде»), КЛ2 – готовят цепь питания К2 («треугольник»), КЛ3 – шунтирует контакт К1.2, КЛ4 – размыкает цепь питания катушки РВ1 и КЛ5 в цепи питания выпрямителя Вп. Реле РВ1 с выдержкой времени разомкнет контакт РВ1 в цепи контактора К1 («звезда»). Следовательно контакты К1.1 и К1.2 – разомкнутся, а контакт К1.3 замкнется. Контактор К2(«треугольник») получит питание. контакт К2.1 соединяет обмотки статора М «треугольником», К2.2 – подает питание на сигнальные лампы Л1 и Л2, К2.3 – разомкнет цепь питания К1(«звезда»). Пуск окончен. Электродвигатель М работает на «треугольнике».
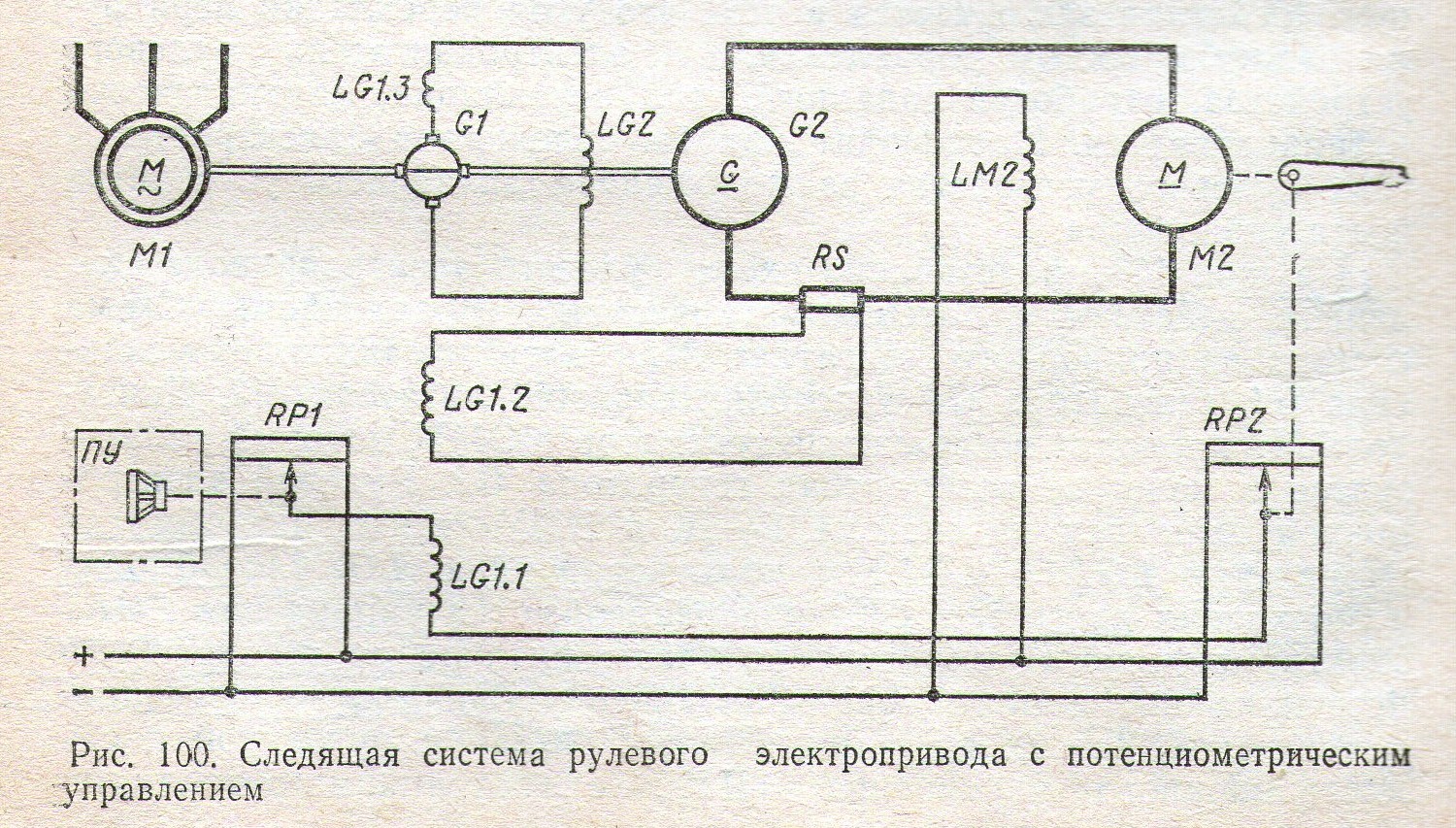
Работа следующей системы рулевого электропривода с потенциометрическим управлением.
Схема состоит из приводного двигателя(М1) электромашинного усилителя(G1), генератора (G2) и исполнительного двигателя(М2).
Двигатель(М1) приводит во вращение генератор и электромашинный усилитель (ЭМУ) - G1, который используется как возбудитель генератора (G2). Рулевой электропривод выполнен по схеме Г-Д, а ЭМУ имеет две обмотки управления LG1.1 и LG1.2 и компенсационную LG1.3. Обмотка возбуждения двигателя LM2 и первая обмотка управления LG1.1 ЭМУ получают питание от независимого источника постоянного тока. Задающее устройство - потенциометрический датчик RP1 механически связан с рукояткой поста управления(ПУ), а потенциометр-приемник RP2 имеет механическую связь с баллером руля. Обмотка управления LG1.1 включается в диагональ моста образованного этими потенциометрами. Вторая обмотка управления LG1.2 включается в силовую цепь М2 через шунт RS. Она выполняет функцию обратной связи по току нагрузки.
При одинаковом положении ползунков обеих потенциометров (RP1 и RP2) по обмотке управления LG1.1 ток не проходит (Iy=0). При переходе рукоятки управления ПУ в другое положение произойдет перемещение ползунка потенциометра RP1. Потенциал его изменится в зависимости от перемещении ползуна (в большую или меньшую сторону).
В обмотке управления LG1 появится ток => на зажимах ЭМУ появится напряжение и по обмотке возбуждения генератора G2 и двигателя М2 появится напряжение. Исполнительный двигатель М2 начнет вращаться в заданном направлении перекладывая в заданном направлении руля. Одновременно с поворотом баллера руля может перемещаться и ползунок потенциометра RP2, приближая потенциал своей контактной щетк к потенциалу потенциометра PR1. Когда эти потенциалы (PR2 и PR1) уравняются, прекратится ток в обмотке управления LG1.1. В результате напряжение на ЭМУ=>0, напряжение G2, а следовательно и М2=>0. Двигатель М2-остановится, выполнив заданную перекладку руля.
Для обеспечения стоянки двигателя под током и предотвращения больших перегрузок обмотка управления LG1.2 включена встречно с обмоткой (задающей) LG1.1. Такое включение позволяет ограничить ток в силовой цепи до допустимых значений.
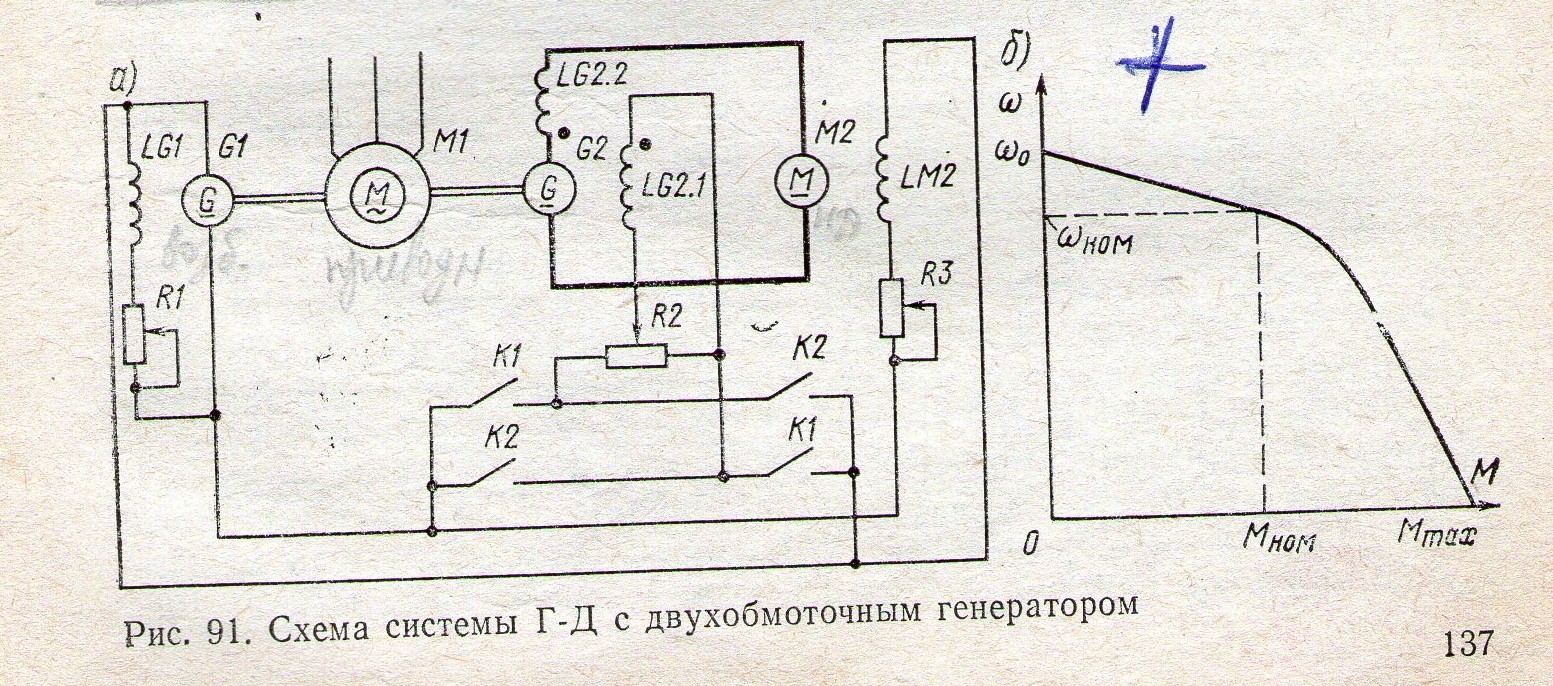
Схема системы Г-Д с двух обмоточном генератором исполнительный двигатель М2 получает питание непосредственно от генератора G2. Приводной двигатель М1 переменного тока приводит во вращение якорь генератора G2 и якорь возбудителя G1, предназначенного для питания независимых обмоток возбуждения генератора (G2) и двигателя(М2). Генератор кроме независимой обмотки возбуждения LG2.1 имеет последовательную размагничивающую обмотку LG2.2. Она создает магнитный поток, который зависит от тока нагрузки и направлен встречно с магнитным потоком от LG2.1. Такое включение обмоток генератора (G2) обеспечивает возможность ограничения момента, тока нагрузки и тока короткого замыкания. исполнительного двигателя до допустимых значений.
Пуск системы Г-Д начинается с пуска приводного двигателя М1. Возбуждается возбудитель G1, воздействуя на его регулятор R1, который включен в цепь обмотки возбуждения возбудителя LG1. Регулятор возбуждения генератора (G2)R2, включенный в цепь его обмотки возбуждения LG2.1 должен быть полностью введен.
Постепенно выводя регулятор возбуждения R2 увеличивают ток в обмотке возбуждения LG2.1, а следовательно и напряжение на зажимах генератора G2, а следовательно и исполнительного двигателя М2, который постепенно будет разгоняться до номинальной угловой скорости. Увеличение на валу (М2) вызовет увеличение тока нагрузки. который будет протекать по якорным обмоткам (М2) и (G2). При больших токах перегрузки будет сильно сказываться влияние размагничивающей обмотки LG2.2. Результирующий магнитный поток, а следовательно и напряжение на зажимах генератора уменьшится. В соответствии с законом Ома по якорным обмоткам пойдет меньший ток. В режиме кратковременной стоянки двигателя под током системы допускает ток 2-2,5 Iном.
Широкое регулирование угловой скорости исполнительного двигателя осуществляется изменением токи в обмотке возбуждения (G2) LG2.1 регулятором R2 изменение напряжения на зажимах генератора, а следовательно и двигателя (М2). Этот способ позволяет регулировать скорость вниз от номинальной. Регулирование скорости двигателя М2вверх от номинальной осуществляется с помощью изменения тока возбуждения в обмотке LM2 с помощью реостата R3 уменьшая Фдв скорость М2 возрастает.
Реверсирование двигателя (М2) достигается изменением направления тока в обмотке возбуждения генератора (G2). Для этого в схеме предусмотренный мостик из контакторов К1 и К2 (одни контакты замыкаются, а другие размыкаются)
Остановка исполнительного двигателя производится снятием напряжения - отключением обмотки возбуждения генератора G2-LG2.1 от возбудителя - контакты К1 и К2 размыкаются.