

9.3.2. Електродинамічний лічильник
Електродинамічний лічильник (рис. 9.7) теж має коло струму (послідовна гілка) і коло напруги (паралельна).
Перше коло струму утворюють дві нерухомі котушки 1, струм в яких дорівнює постійному струмові / контрольованої установки. Цей струм збуджує головне магнітне поле лічильника і, відповідно, основний магнітний потік рухомого елементу лічильника
![]()
де кф — постійний коефіцієнт.
На осі рухомої частини приладу закріплені три котушки 2 — якоря лічильника, їх кінці приєднані до закріплених на осі та
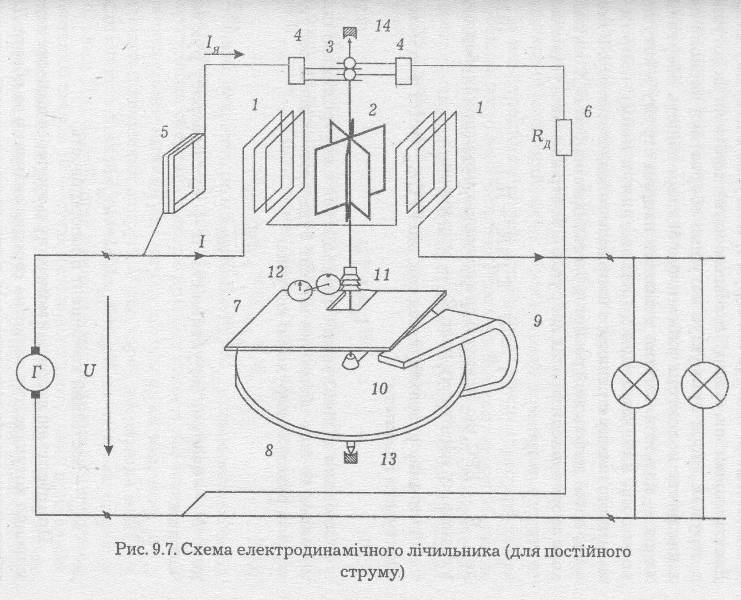
ізольованих одних від одного пластин колектора 3. По колектору ковзають щітки 4, через які струм І^ поступає в котушку якоря. Електродинамічна сила дії головного магнітного поля на котушки з струмом якоря примушує котушки обертатися навколо осі, а наявність колектора забезпечує безперервність обертання якоря — колектор і щітки змінюють напрям струму в котушці, коли вона наближається до положення, в якому напрям її магнітного потоку співпадає з напрямом головного потоку. У коло включений додатковий резистор 6 з великим опором Rд, і оскільки коло якоря знаходиться під напругою U контрольованої установки, то струм в якорі:
![]()
де Ея — ЕРС, що індукується в котушках якоря при їх обертанні в головному магнітному полі; Rя — опір якоря.
Лічильник розраховується так, що ЕРС Ея « U і нею можна знехтувати і вважати:
![]()
Оскільки в лічильнику знаходиться електродинамічний механізм, то його обертовий момент буде пропорційний добутку струмів рухомої і нерухомої котушок

де М – взаємна індуктивність ; α – кут повороту рухомої частини;
або
![]()
де коб — постійний коефіцієнт пропорційності.
При обертанні якоря цей момент пульсує через відносне переміщення котушок (тут записане середнє значення за оберт). Для отримання гальмівного моменту в лічильнику використано магніто індукційне гальмування: поле постійного магніту 9 діє на гальмівний алюмінієвий диск S. Котушки захищені від постійного магніту екраном 7. Відповідно в лічильнику створюється гальмівний момент прямо пропорційний частоті обертання п якоря. Таким чином, у лічильнику виконані обидві умови, які забезпечують пряму пропорційність між частотою обертання осі лічильника і кількістю енергії. На чутливість і точність лічильника може помітно впливати тертя в лічильному механізмі (11 і 12), щіток об колектор і в підшипниках 13 і 14. Особливе зниження чутливості, що викликається тертям при малому навантаженні (лічильник може не обертатися). Щоб запобігти цьому недоліку, всі лічильники постачаються компенсаторами тертя (які створюють додатковий магнітний потік, або обертовий момент).
В електродинамічному лічильнику компенсатором тертя є невелика котушка 5, включена послідовно в коло якоря. Магнітне поле котушки діє на струм якоря Iя котушок 2 і створює обертовий момент, пропорційний добутку струмів котушки і якоря. Оскільки це один і той самий струм Ія = ku · U, то допоміжний обертовий момент
![]()
Цей момент лічильника не залелжить від струму навантаження. Він повинен зрівноважувати момент сил тертя Мтр, тобто бажано, щоб Mдоп = Мтр. Таким чином, повне рівняння моментів лічильника
![]()
Однак, наявність постійного моменту Мдоп, що не залежить від навантаження, створює небезпеку самоходу лічильника (тобто беззупинкове обертання якоря при відсутності навантаження). Самохід може виникнути через збільшення моменту М внаслідок підвищення напруги U або через зменшення моменту Мтр, наприклад внаслідок вібрації стіни, на якій закріплений лічильник. Для запобігання самоходу лічильник забезпечується гальмівним гачком 10 — куском стального дроту, який припаяний до осі лічильника або до диску і притягуючим гальмівним магнітом 9. Електродинамічний лічильник у принципі може працювати в колах постійного і змінного струмів. Але для змінного струму краще застосовувати більш простий, дешевший і витриваліший До перевантажень індукційний лічильник.
Момент сил тертя в індукційному лічильнику суттєво менший, ніж в електродинамічному, оскільки pухoмa частина індукційного лічильника легша. Але в обох лічильниках тертя в лічильному механізмі значне, тому компенсація тертя необхідна і в індукційному механізмі. У всіх конструкціях індукційних лічильників для створення допоміжного моменту використовується один і той же загальний принцип—порушення симетрії в магнітному колі потоку Ф2 (пропорційного напрузі U). Таким чином здійснюється умова для створення обертового моменту індукційним шляхом. На сердечнику електромагніту закріплюється коротко замкнутий виток мідного дроту ωк, який охоплює частину поверхні поперечного перерізу сердечника біля диску. Магнітне поле витка, додаючись до основного поля, створює під витком невеликий магнітний потік (додатковий), що скріплений з диском і разом з основним потоком цей потік створює допоміжний момент, який компенсує момент тертя.
Для обліку енергії в трифазних системах використовують лічильники трифазного струму, в яких два або три рухомих елементи індукційних лічильників діють на загальну вісь лічильника і через неї на лічильний механізм. Схеми цих лічильників відповідають схемам вимірювання потужності методами двох або трьох ватметрів або деяким спеціальним способам вимірювань (див. далі).