

Система електровимірювальних приладів
4.1. Магнітоелектрична система
Умовне
позначення —
![]()
Принцип дії магнітоелектричного вимірювального механізму базується на силовій взаємодії постійного магнітного поля і провідника з постійним струмом. Існує два основних типи приладів магнітоелектричної системи: прилади з рухомою котушкою (рухомою рамкою) і прилади з рухомим магнітом, причому перший застосовується частіше.
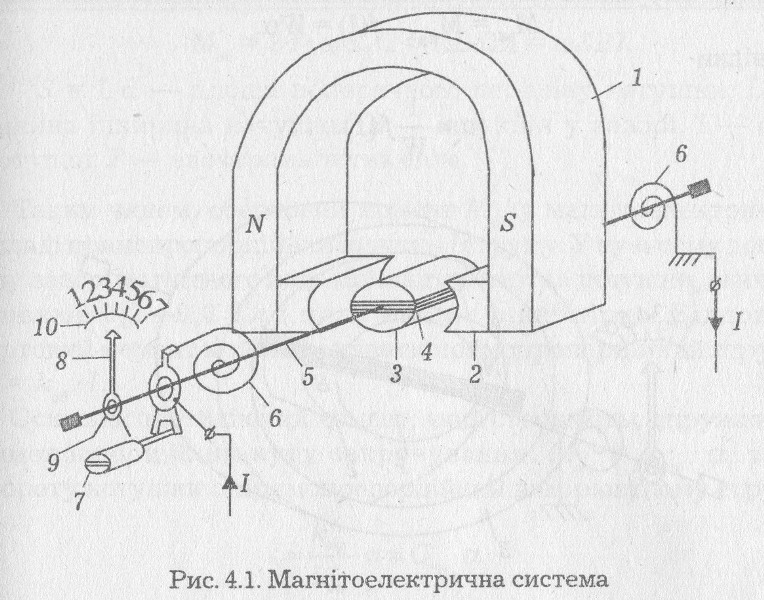
Розглянемо будову приладів з рухомою котушкою (рис. 4.1).
На кінцях постійного магніту 1 закріплені полюсні наконечники 2, між якими поміщений нерухомий циліндр 3. Полюсні наконечники і нерухомий циліндр виконані із магніто-м'якого матеріалу (сталь). Така конструкція магнітної системи дозволяє отримати у зазорі між полюсними наконечниками 2 і циліндром З рівномірне радіальне постійне магнітне поле. Зазор — 1,5—2,0 мм. В цьому полі (зазорі) знаходиться рухома котушка 4, яка намотується на алюмінієвий каркас, що одночасно виконує роль електромагнітного заспокоювача рухомої частини системи. Застосовують і без каркасні рамки. Рухома котушка 4 кріпиться на півосях 5 або розтяжках. Рамка (котушка) може повертатись у зазорі на півосях, Вимірювальний постійний струм І поступає у котушку 4 через спіральні пружини 6, які у створюють протидіючий момент. Крім того, допоміжними елементами конструкції магнітоелектричного вимірювального приладу є: 7 — пристрій встановлення нульового положення стрілки 8; 9 — балансир; 10 — шкала.
Проходячи через провідники рамки (котушки), струм І взаємодіє з магнітним потоком постійного магніту, що викликає появу механічних сил Р, які створюють обертовий момент Мо6. Обертовий момент намагається повернути рамку, при правильному виборі напряму струму, за годинниковою стрілкою (на кут α):
Моб = f(I) (4.1)
Відхилення рамки (котушки) буде продовжуватися до тих пір, доки обертовий момент Моб не зрівноважиться з протидіючим моментом Мпр , який створюється пружинами 6'. При закручуванні пружинки створюють протидіючий момент Мпр, який буде пропорційний куту α, на який відхилиться рухома частина від нульового положення. Стрілка 8 відхилиться на кут α, який буде пропорційний струму І у котушці (рамці).
Мпр = W·α (4.2)
де W — питомий протидіючий момент пружинок.
Рухома частина буде рухатися доки не настане рівновага.
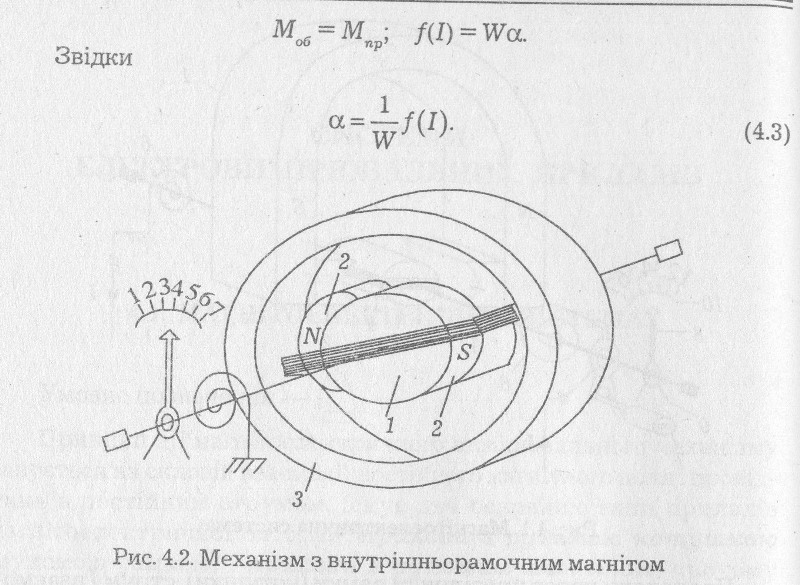
В механізмах з внутрішньорамочним магнітом (рис. 4.2.) сердечником є сам магніт 1 і його охоплює циліндричний магніто-провід 3 із магніто — м'якого матеріалу. Така конструкція дає змогу зробити механізм дуже малих розмірів. Але у цих механізмах важко отримати рівномірне поле у повітряному зазорі через неоднакові довжини магнітних ліній. Для отримання більш однорідного поля у внутрішньорамочного магніту є накладки 2 із магніто — м'якого матеріалу.
В магнітоелектричному механізмі з однорідним полем кут між напрямами вектора магнітної індукції В у повітряному зазорі і активній частині провідників із струмом І рухомої котушки дорівнює 90°. Відповідно, на кожний із провідників діє електромагнітна сила F:
F= BIL, (4.4)
де L — довжина активної частини провідника.
Котушка має ω витків і закріплена на каркасі діаметром d. Тому обертовий момент, який діє на рухому частину механізму,
![]()
де S = L·d — площа поперечного перерізу котушки; L, d. — довжина і ширина котушки, В — індукція у зазорі, І — струм котушці; F — електромагнітна сила.
Таким чином, обертовий момент Моб у магнітоелектричному приладі прямопропорційний індукції і струму. У вузькому повітряному зазорі магнітного кола приладу магнітна індукція, звичайно, дорівнює 0,2—0,3 Тл і поле майже рівномірне. Відповідно, обертовий момент можна рахувати прямопропорційний струмові:
Моб =коб ·І
Оскільки протидіючий момент, який створюється пружинками прямопропорційний куту закручування: Мпр = кпр • α, то кут повороту котушки а прямопропорційний вимірюваному струмуІ.

де Спр — стала приладу ("ціна поділки").
Напрям обертового моменту приладу визначається правилом лівої руки. При зміні напряму струму змінюється і напрям обертового моменту. При змінному струмі на рухому частину приладу діють швидко змінні моменти протилежної дії. їх результуюча дія не змінить положення рухомої частини приладу і стрілка залишиться на нульовій поділці шкали (або буде трошки вібрувати). Тому прилади магнітоелектричної системи використовують для вимірювання постійного струму. Вимірювання змінного струму за допомогою магнітоелектричного механізму можливе тільки після попереднього випрямлення або перетворення його у постійний струм (наприклад термоперетворювач).
Магнітоелектричні прилади дуже чутливі. Тому у гальванометрі у більшості використовують цю систему. Висока чутливість приладу забезпечує достатній запас міцності, шляхом зменшення густини струму у струмопровідних частинах. Тому прилади магнітоелектричної системи витривалі до перевантажень. Цьому сприяє також лінійна залежність обертового моменту приладу від струму, а не квадратична, яка характерна для більшості інших систем приладів.
Оскільки у магнітоелектричних приладах сильне власне магнітне поле, то зовнішні магнітні поля мало впливають на їх покази. У наслідок високої чутливості власне споживання енергії магнітоелектричними приладами відносно мале (від 10-6 до 10 -5 Вт).
У приладах магнітоелектричної системи з рухомим магнітом обертовий момент діє на рухомий постійний магніт, а котушка з вимірювальним струмом нерухома. Пружини замінює сила додаткового постійного магніту, який встановлюється на корпусі приладу у безпосередній близькості від рухомого постійного магніту. Ці прилади прості за будовою і дуже стійкі до механічних перевантажень та дешеві, але точність їх мала через неоднорідність магнітного поля.
Вони застосовуються для орієнтовних вимірювань в автомобілях (на щитках приладів).
Оскільки
![]()
де α — кут повороту прямопропорційний кількості витків.
То можна сказати, що застосовуючи рамки з різним числом витків щ, можна виготовляти прилади з бажаними межами вимірювань. Використовуючи рамки з великою кількістю витків тоненького дроту, можна вимірювати дуже малі струми; при рамці з малим числом витків дроту більшого перерізу можна вимірювати більші струми. Наприклад, при діаметрі дроту 0,03 мм і кількості витків ω = 500 отримується дуже чутливий мікроамперметр, відхилення стрілки якого на повну шкалу досягається при струмі у десяті долі міліампера. Але зменшити кількість витків, менше ніж один виток неможливо. Тому з метою розширення меж вимірювань для приладів магнітоелектричної системи використовують допоміжні пристрої — шунти.
Шунт — це невеликий опір (резистор) Rш, який включається паралельно з котушкою вимірювального механізму, або з гілкою, яка містить котушку. Резистор, який включається послідовно з котушкою вимірювального механізму називається додатковим резистором Rдод (рис. 4.3).
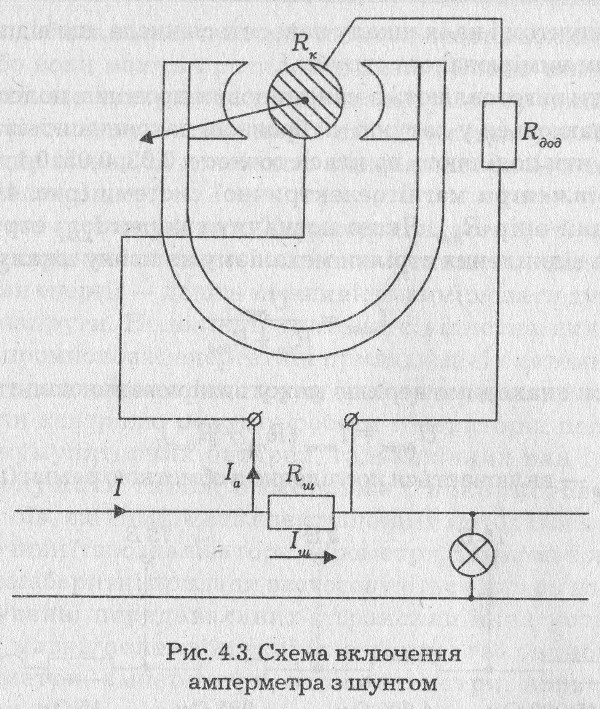
У випадку підключення шунта вимірюваний струм І розподілиться між шунтом Іш і рамкою приладу Іа оберненопропорційно до їх опорів.
Оскільки
де n — коефіцієнт шунтування, на який треба помножити покази приладів, щоб отримати значення струму І.
Практично ніяких обрахунків коефіцієнтів шунтування для готового приладу не вимагається, оскільки прилади градуюють ся разом із шунтом і на їх шкалу наносяться числа, що відповідають значенням вимірюваного струму І.
Шунти виготовляють з манганінових проводів, полос і стержнів які впаюються у латунні чи бронзові наконечники із затискачами. Шунти поділяють на класи точності 0,02; 0,05; 0,1; 0,2; 0,5.
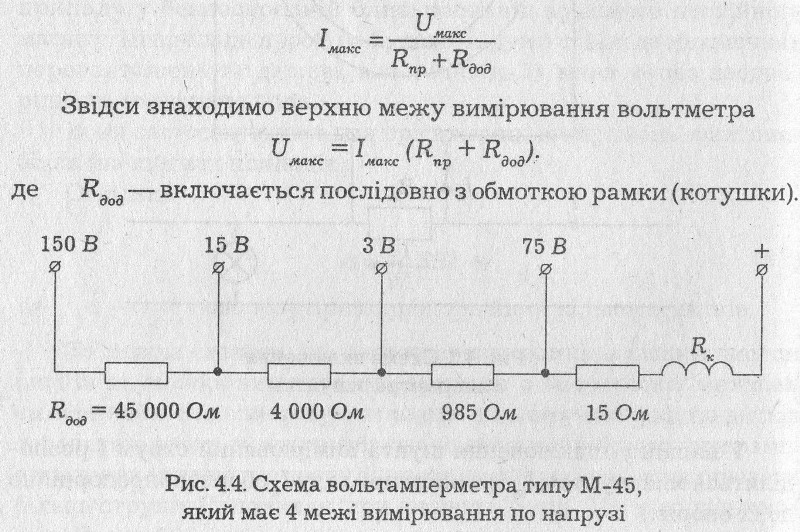
Вольтметри магнітоелектричної системи (рис. 4.4) мають додатковий опір Rдод. Якщо позначити через Імакс струм, який викликає відхилення стрілки механізму на повну шкалу.
Класи додаткових опорів (за точністю підгонки): 0,02; 0,05; 0,1; 0,2; 0,5; 1. Матеріалом додаткових опорів є манганіновий дріт, або інший матеріал, що має великий питомий опір і незначний температурний коефіцієнт (константант, реостан, нікелін). Додатковий опір вольтметра, повинен бути безреактивним, для того щоб його значення не залежало від частоти, тому дріт намотується біфілярно.
Відхилення температури навколишнього середовища від нормальної (+20 °С) викликає зміну пружності пружинок і магнітного потоку постійного магніту. Ці зміни дуже малі — 0,04% на 1 °С і вплив їх на покази приладів майже повністю компенсується взаємно, бо вони мають протилежні знаки. Вплив зміни опору провідників, що утворюють вимірювальну схему приладу від температури складає — 0,04% на 1 °С зміни температури. Зменшити цей вплив можна за допомогою спеціальних схем з температурною компенсацією.
Область застосування. Характерні властивості приладів магнітоелектричної системи — висока чутливість і мале власне споживання енергії — дають можливість вимірювати дуже малі струми і напруги. Недоліком системи є відносна складність будови. В промисловій енергетиці прилади цієї системи застосовуються для вимірювання струму і напруги у колах постійного струму, для контролю режиму роботи генераторів постійного струму, акумуляторних батарей, гальванічних ван і т. д. Ці прилади служать також омметрами і використовуються для пристроїв, які виміряють електричними методами неелектричні величини (газоаналізатори, пірометри, термометри опору і т. д.). Малогабаритні прилади застосовуються для зв'язку, при комплектуванні передавальних і трансляційних установок. Прилади магнітоелектричної системи: гальванометри, міліамперметри, амперметри, мілівольтметри, вольтметри, мегомметри.