

Свободные колебания систем с одной степенью свободы
Простейшей колебательной системой с одной степенью свободы может служить груз, подвешенный на вертикально расположенной пружине (рис.84 ).
Дифференциальное уравнение колебаний груза Q получим, взяв сумму проекций всех сил (включая силы инерции согласно принципу Даламбера) на вертикальную ось, в виде
Q + cx –
(Q - ![]() ẍ) = О
ẍ) = О
Отсюда ẍ + cx = О или ẍ + ω2 = 0
где
х — вертикальное перемещение груза от
положения статического равновесия;
ẍ
= ![]() ; t — время; с
— жесткость пружины;
; t — время; с
— жесткость пружины; ![]() — ускорение свободного падения; ω —
угловая частота свободных колебаний ;
ω2 =
— ускорение свободного падения; ω —
угловая частота свободных колебаний ;
ω2 = ![]() =
= ![]()
Общий интеграл дифференциального уравнения второй степени имеет вид:
x
= А ![]() + В
+ В ![]()
где A и В — постоянные интегрирования, зависящие от начальных условий.
Если
заданы начальная координата груза
х0 и начальная скорость vo=
ẋ при t
= 0, то из общего интеграла определим
А = хо ; В = ![]() ;
;
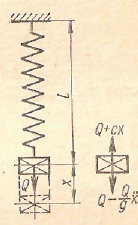
Рис. 84
Полагая
Хо = а·
;
= а·![]() решение можно представить в виде
х = а·
решение можно представить в виде
х = а·![]() где а – амплитуда колебаний,
определяемая по формуле а =
где а – амплитуда колебаний,
определяемая по формуле а =![]() =
=
![]()
![]() угловая
частота колебания (число колебаний,
совершаемое в течение 2π секунд)
получается
угловая
частота колебания (число колебаний,
совершаемое в течение 2π секунд)
получается ![]() =
= ![]() или
=
или
= ![]() где m =
где m =![]() — масса подвешенного груза.
— масса подвешенного груза.
Зная,
угловую частоту, можно определить период
колебаний T =![]() = 2π
= 2π![]() = 2π
= 2π ![]()
Техническая
частота (число колебаний в секунду, гц)
определится формулой f
= ![]() =
= ![]()
При колебаниях груза, подвешенного на
конце пружины, представляющей собой
стержень длиной ℓ с жесткостью
поперечного сечения на растяжение ЕА
и жесткостью с = ![]()
собственная
частота колебаний определится
формулой ![]() =
=
=
= ![]()
Учитывая,
что m =
можно записать и в таком виде
=
= ![]()
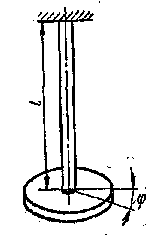
Примером системы с одной степенью
свободы может служить также
колебательная система, состоящая из
массивного диска, прикрепленного
к нижнему концу жестко закрепленного
верхним концом вала (рис.85 ). Если к диску
в его плоскости приложить и внезапно
удалить пару сил, то возникнут
свободные колебания кручения вала
вместе с диском. Обозначим крутильную
жесткость вала (крутящий момент,
вызывающий Рис.85
закручивание вала на один радиан) через
с: с =![]() =
= ![]()
где G — модуль упругости при сдвиге; d — диаметр вала; ℓ — длина вала.
Воспользовавшись принципом Даламбера (инерцией массы стержня пренебрегаем), получим дифференциальное уравнение крутильных колебаний диска, приравняв крутящий момент c·φ, действующий в вале при его закручивании на угол φ , моменту сил инерции массы диска:
![]() + c·φ
=0
+ c·φ
=0
где
![]() — момент инерции диска относительно
оси стержня, перпендикулярной к
плоскости диска. Для диска
постоянной толщины h,
изготовленного из материала с удельным
весом γ,
получим
— момент инерции диска относительно
оси стержня, перпендикулярной к
плоскости диска. Для диска
постоянной толщины h,
изготовленного из материала с удельным
весом γ,
получим
![]() =
= ![]()
Здесь
D — диаметр диска; Q
— вес диска.
Обозначив ω2 = ![]() дифференциальное уравнение перепишем
в виде:
дифференциальное уравнение перепишем
в виде: ![]() +
+ ![]() ·φ
=0
Общее решение этого уравнения
будет φ
= А
+ В
·φ
=0
Общее решение этого уравнения
будет φ
= А
+ В
Период
колебаний рассматриваемой системы T
=
= 2π ![]()
Для
стержня постоянного диаметра d
имеем T = 2π ![]() а
частота колебаний f
=
=
а
частота колебаний f
=
= ![]()
![]()
Вынужденные колебания систем c одной степенью свободы при гармоническом возбуждении
Уравнение вынужденных колебаний
системы с одной степенью свободы
(рис. 84) получим, если в дифференциальное
уравнение
ẍ + cx
= О кроме сил инерции и сил упругости,
действующих на груз Q, учтем влияние
периодической вынуждающей силы - Р·соs
рt (здесь р - угловая частота
вынуждающей силы) ![]() ẍ
+ cx
= Р·соs рt
ẍ
+ cx
= Р·соs рt
Обозначив:
ω2 = ![]() и q =
и q = ![]() приведем уравнение к виду ẍ
+ ω2х
= q· соs рt
При р малом по сравнению с ω членом
ẍ
можно пренебречь и считать, что имеет
место только статическая деформация,
максимальное значение которой
приведем уравнение к виду ẍ
+ ω2х
= q· соs рt
При р малом по сравнению с ω членом
ẍ
можно пренебречь и считать, что имеет
место только статическая деформация,
максимальное значение которой ![]() =
=![]() Для определения
динамической деформации необходимо
решить уравнение ẍ
+ ω2х
= q· соs
рt .
Решение уравнения будет состоять из
суммы:
•
общего решения однородного уравнения
(при q· соs
рt = 0)
х = А
+ В
•и частного решения
уравнения
х = C·соs
рt
Для определения
динамической деформации необходимо
решить уравнение ẍ
+ ω2х
= q· соs
рt .
Решение уравнения будет состоять из
суммы:
•
общего решения однородного уравнения
(при q· соs
рt = 0)
х = А
+ В
•и частного решения
уравнения
х = C·соs
рt
Подставив
частное решение в дифференциальное
уравнение , найдем С = ![]()
Тогда
общее решение уравнения будет x
= А
+ В
+![]() соs рt
соs рt
Первые
два слагаемых правой части решения ,
характеризуют свободные колебания,
которые обычно быстро затухают;
последнее характеризует вынужденные
установившиеся колебания с угловой
частотой р (с периодом Т1= 2п/р или
частотой f = р/2π Гц)
и амплитудой С =
Амплитуда вынужденных колебаний
существенно зависит от соотношения
собственной ω и вынужденной р частот
колебаний и может быть охарактеризована
так называемым коэффициентом
динамического усиления - β.
β =![]() =
:
=
: ![]() =
= ![]() =
= ![]() или β =
или β = ![]()
где Т1=
![]() ; Т =
; Т = ![]()
![]() и
С →
и
С →![]() Когда же частота вынужденных
колебаний р→ω, т. е. , р/ω → 1,
то С→∞.
Когда р = ω, имеет место
состояние резонанса.
Соответствующая частота вынуждающей
силы р = ркр при этом называется
критической. График зависимости ІβІ
= f(р/ω), приведенный
на рис.86 и представляющий собой так
называемую амплитудно-частотную
характеристику, позволяет проанализировать
поведение колебательной системы в
зависимости от соотношения частот
свободных ω и вынужденных р
колебаний.
Когда же частота вынужденных
колебаний р→ω, т. е. , р/ω → 1,
то С→∞.
Когда р = ω, имеет место
состояние резонанса.
Соответствующая частота вынуждающей
силы р = ркр при этом называется
критической. График зависимости ІβІ
= f(р/ω), приведенный
на рис.86 и представляющий собой так
называемую амплитудно-частотную
характеристику, позволяет проанализировать
поведение колебательной системы в
зависимости от соотношения частот
свободных ω и вынужденных р
колебаний.
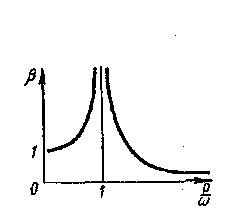
Рис. 86
Пример:
Электродвигатель весом Q=400 кг делающий
n=1000 оборотов в минуту установлен на
консольной балке, состоящей из двух
швеллеров длиной 100 см(от опоры до центра
масс двигателя). Вертикальная составляющая
центробежной возмущающей силы, возникающая
от неуравновешенности ротора и подвижной
части технологического оборудования
равна 25% веса двигателя, т.е. в нашем
случае Р = 100 кг. Закон изменения возмущающей
силы Р·![]() Подобрать сечение швеллеров, с учетом
динамического воздействия колебаний.
Решение: При запуске
электродвигателя частота вращения
ротора будет возрастать от нуля, до 1000
оборотов в минуту. Чтобы резонанс не
наступил при запуске или остановке
двигателя необходимо, чтобы частота
собственных колебаний балок должна
быть больше максимального значения
частоты вынуждающей силы( не менее чем
на 30%), т.е. nсобств=1,3·n = 1300 об. в
мин. Или
Подобрать сечение швеллеров, с учетом
динамического воздействия колебаний.
Решение: При запуске
электродвигателя частота вращения
ротора будет возрастать от нуля, до 1000
оборотов в минуту. Чтобы резонанс не
наступил при запуске или остановке
двигателя необходимо, чтобы частота
собственных колебаний балок должна
быть больше максимального значения
частоты вынуждающей силы( не менее чем
на 30%), т.е. nсобств=1,3·n = 1300 об. в
мин. Или ![]() собств=
собств=
![]() =
= ![]() = 136 сек-1 Мы знаем, что
=
= 136 сек-1
Откуда
= 136 сек-1 Мы знаем, что
=
= 136 сек-1
Откуда ![]() =
=![]() =
= ![]() =0,053 (см) С другой стороны величину
статического прогиба балки от веса
электродвигателя легко выразить по
формуле Мора, с применением правила
Верещагина в таком виде
=
=0,053 (см) С другой стороны величину
статического прогиба балки от веса
электродвигателя легко выразить по
формуле Мора, с применением правила
Верещагина в таком виде
=
![]() откуда
откуда ![]() =
= ![]() =
= ![]() = 629 см4 Ближайший больший швеллер
№ 16 имеет осевой момент инерции
= 747 см4
Тогда для
балки из двух швеллеров № 16
=
=
= 629 см4 Ближайший больший швеллер
№ 16 имеет осевой момент инерции
= 747 см4
Тогда для
балки из двух швеллеров № 16
=
= ![]() =
=![]() = 147 сек-1 т.е. nсобств=
= 147 сек-1 т.е. nсобств=
![]() =
= ![]() =1400 об. в мин. Это больше частоты
возмущающей силы на 40% Проверим прочность
консолей
=1400 об. в мин. Это больше частоты
возмущающей силы на 40% Проверим прочность
консолей ![]() =
= ![]() =
=![]() =
=![]() = 216(
= 216( ![]() )
коэффициент
динамического усиления β =
)
коэффициент
динамического усиления β = ![]() =
= ![]() = 2,04 тогда, с учетом динамического
воздействия возмущающей силы
= 2,04 тогда, с учетом динамического
воздействия возмущающей силы ![]() =
=![]() = 2,04·
= 2,04·![]() = ±110 (
)
= ±110 (
)
![]() =
+
=
+![]() =216
+110 = 326 должно быть меньше допускаемого
напряжения.
=216
+110 = 326 должно быть меньше допускаемого
напряжения.