

2.8 Устойчивость двигателя
Важно, чтобы работа двигателя вместе с производственным механизмом протекала устойчиво. Под устойчивой работой двигателя понимается его способность вернуться в исходную точку равновесия после кратковременного действия возмущающих сил, нарушивших это равновесие. Оценку устойчивости производят из совместного рассмотрения механических характеристик двигателя и производственного механизма.
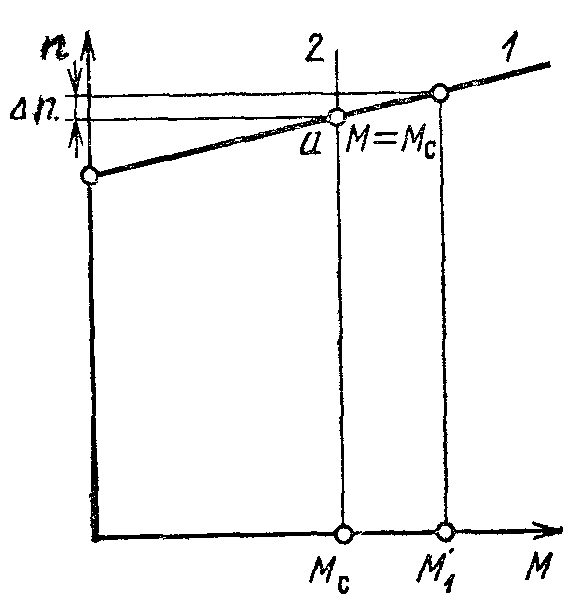
Рисунок 7 - К определению устойчивости работы двигателя совместно с механизмом
Работа двигателя независимого возбуждения может быть устойчивой и неустойчивой. Неустойчивая работа будет наблюдаться при возрастающих механических характеристиках двигателя. На рисунке 7 показана такая характеристика двигателя (прямая 1). Там же дана механическая характеристика для механизма, приводимого во вращение двигателем (прямая 2). Для него принята зависимость Мс=М2=const, являющаяся типичной для целого ряда механизмов (подъемные краны, механизмы подачи для металлорежущих станков и т. д.). Пересечение этих прямых является точкой равновесия моментов М=Мс (точка а) и соответствует установившемуся режиму работы.
Предположим, что в результате действия каких-либо возмущающих сил скорость увеличится на Δn. Тогда момент двигателя увеличится до М1 и возникнет положительный динамический момент, так как
М1—Mc>0. Под действием избыточного момента двигателя скорость n начнет нарастать, разность М—Мс еще больше увеличится, что приведет к дальнейшему возрастанию скорости, и т. д. Если в результате возмущения скорость уменьшится, то М—Мс<0 и скорость будет непрерывно уменьшаться. Отсюда следует, что точка а является точкой неустойчивого равновесия и, следовательно, нормальная работа двигателя с возрастающей механической характеристикой невозможна.
Аналогичным путем можно показать что при падающей механической характеристике работа будет проходить устойчиво, так как всякое отклонение скорости на ±Δn вызывает появление избыточного момента, направленного на восстановление равновесия. В общем виде критерием устойчивой работы является неравенство
![]() (27)
(27)
Иногда при проектировании двигателей независимого возбуждения в целях уменьшения его размеров и массы принимают повышенные значения линейной нагрузки А и индукции в воздушном зазоре Вδ .
В таких двигателях сильно проявляется размагничивающее действие реакции якоря, и получить у них падающую механическую характеристику не удается. Тогда предусматривают специальную обмотку возбуждения (стабилизирующую обмотку), располагаемую на полюсах и включаемую последовательно с якорем. Она имеет всего несколько витков и предназначается для компенсации размагничивающего действия реакции якоря. При наличии такой обмотки поток машины практически не будет изменяться с ростом тока якоря — он будет стабилизирован. Механическая характеристика такой машины будет падающей.
2.9 Исследование двигателя постоянного тока последовательного возбуждения
В двигателе постоянного тока последовательного возбуждения обмотка возбуждения включена последовательно в цепь якоря, поэтому магнитный поток Ф в нем зависит от тока нагрузки I=Iа=Iв .При небольших нагрузках магнитная система машины не насыщена и зависимость магнитного потока прямо пропорциональна от тока нагрузки, т.е.:
![]() (28)
(28)
где
![]() —
коэффициент пропорциональности.
—
коэффициент пропорциональности.
С учетом (28) уравнение (20) примет вид:
![]() (29)
(29)
Уравнение (29) является скоростной характеристикой двигателя постоянного тока последовательного возбуждения.
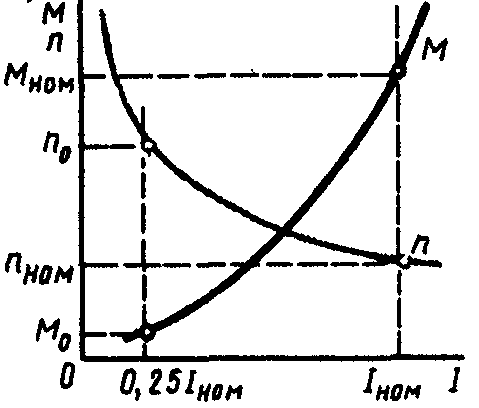
Рисунок 8 – Скоростная n=f(Iа) и моментная M=f(Iа) характеристики двигателя последовательного возбуждения.
Электромагнитный момент для двигателя постоянного тока последовательного возбуждения с учетом (28) определяется формулой:
![]() (30)
(30)
где
![]() —
коэффициент, зависящий от конструктивных
параметров машины:
—
коэффициент, зависящий от конструктивных
параметров машины:
![]() (31)
(31)
Таким образом, вращающий момент двигателя при ненасыщенном состоянии магнитной системы пропорционален квадрату тока, а скорость вращения обратно пропорциональна току нагрузки.
Выразив ток Ia из (30), получим:
![]() (32)
(32)
С учетом и (32) уравнение (29) примет вид:
![]() (33)
(33)
Уравнение (33) является механической характеристикой двигателя постоянного тока последовательного возбуждения.
Анализ этого уравнения показывает, что с увеличением нагрузки на валу двигателя, т.е. с увеличением электромагнитного момента Мэм, уменьшается скорость вращения якоря.
При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется, и характеристики двигателя приобретают почти прямолинейный характер. Механическая характеристика двигателя последовательного возбуждения показывает, что скорость вращения якоря двигателя значительно меняется при изменениях нагрузки. Такая характеристика является мягкой и имеет гиперболический характер.
При уменьшении нагрузки на якоре двигателя последовательного возбуждения скорость вращения якоря резко увеличивается и может достигнуть опасных для двигателя значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Для более надежной работы вал двигателя последовательного возбуждения должен быть жестко соединен с рабочим механизмом посредством муфты или зубчатой передачи. Применение ременной передачи недопустимо, так как при обрыве или сбросе ремня может произойти «разнос» двигателя.
Учитывая возможность работы двигателя последовательного возбуждения на повышенных скоростях вращения якоря, согласно ГОСТ, подвергают испытанию в течение 2 мин на превышение скорости вращения якоря на 20% сверх максимальной скорости, указанной на заводской табличке, но не более чем на 50% сверх номинальной скорости.
Механические характеристики двигателя последовательного возбуждения n=f(М) представлены на рисунке 10. Резко падающие кривые механических характеристик обеспечивают двигателю последовательного возбуждения устойчивую работу при любой механической нагрузке.
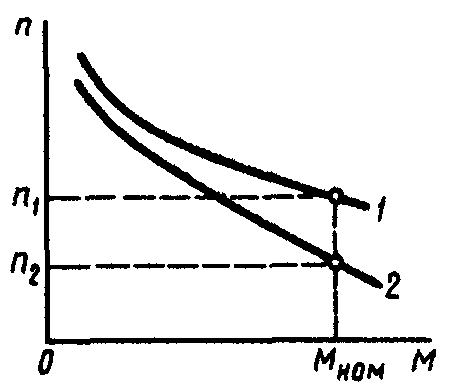
Рисунок 9 – Механические характеристики n=f(M) двигателя последовательного возбуждения (1 - естественная характеристика; 2 — искусственная характеристика).
Свойство этих двигателей развивать большой вращающий момент, пропорциональный квадрату тока нагрузки, имеет большое значение, особенно в тяжелых условиях пуска и при перегрузках.
Эта особенность двигателей последовательного возбуждения является одной из причин их широкого применения в качестве тяговых двигателей на транспорте, а также в качестве крановых двигателей в подъемных установках, т. е. во всех случаях электропривода с тяжелыми условиями пуска и сочетанием значительных нагрузок на валу двигателя при малой скорости вращения якоря.
Изменение скорости вращения якоря двигателя при переходе от номинальной нагрузки к холостому ходу, выраженное в процентах, называют номинальным изменением скорости вращения:
![]() ,%
(34)
,%
(34)
где
![]() — скорость вращения при нагрузке
двигателя, составляющей 25% от номинальной.
— скорость вращения при нагрузке
двигателя, составляющей 25% от номинальной.