

3.1. Параметры исходного механизма
В основном окне генератор выдает относительные размеры механизмов, которые следует понимать следующим образом:
![]() – длина кривошипа;
– длина кривошипа;
-
 ;
;
 ;
; ;
;
 .
.– относительные размеры механизма
В случае
кривошипно-ползунного механизма под
![]() понимается отношение
понимается отношение
![]() ,
где e
– внеосность ползуна.
,
где e
– внеосность ползуна.
3.2. Пример назначения исходных данных задания
На рис. 18 показано диалоговое окно программы при получении одного варианта исходных данных для четырех вариантов четырехзвенных механизмов.
|
Рис. 18. Диалоговое окно программы при получении одного варианта исходных данных для четырех различных типов рычажных механизмов |
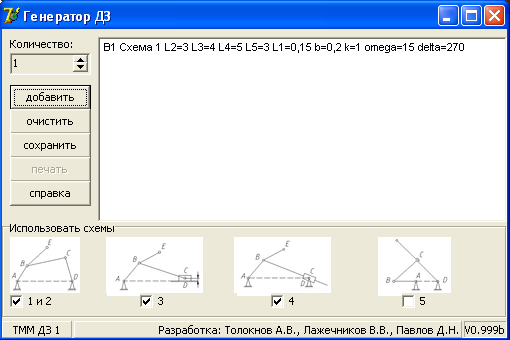
Для этого в выпадающем меню "Количество" оставляем значение 1, отмечаем первые три схемы, нажимаем кнопку «Добавить».
В основном окне генератора выводятся исходные данные к расчету механизмов. В исходных данных приняты следующие обозначения:
"В1" – номер варианта задачи. В данном случае – вариант 1;
"Схема 1" – номер одной из отмеченных галочкой рассматриваемых схем. В данном случае это схема "1 и 2";
"L2=3 L3=4 L4=5 L5=3" – относительные размеры механизма;
"L1=0,15"
– длина кривошипа
![]() ,
т.е. значение величины
,
т.е. значение величины
![]() ,
выраженное в метрах;
,
выраженное в метрах;
"b=0,2 k=1 omega=15"
– параметры закона движения кривошипа,
где под "omega"
следует понимать величину
![]() ,
имеющую размерность
,
имеющую размерность
![]() ,
т.е.
,
т.е.
![]() ;
;
"delta=270" ––угол между осью шатуна BC и линией BE.
ДЗ будет выдаваться в следующем виде:
4. Основные сведения о программе digital constructor и принципы работы с ней
Данное руководство написано к версии программы 2.3 от 15.02.95. Авторы-разработчики: Киркин К.А., Головин А.Р..
Программа Digital Constructor обладает широкими возможностями: построение плоских механизмов, в том числе и с вынесенной шатунной точкой; присоединение диады любой из пяти предложенных модификаций; анимация движения механизма (также возможно пошаговое движение); наглядное изображение кривой, по которой движется выбранная точка механизма; получение графиков функций (положения, скоростей и ускорений выбранной точки (звена)) и их детализация (возможность увеличения необходимого фрагмента); универсальность построенного механизма (возможность изменять линейные и угловые размеры) и многое другое.
Программа управляется как клавиатурой, так и мышью. Ниже рассмотрены основные функциональные клавиши, которые понадобятся во время работы с программой.
В случае ввода графической информации и работы с меню:
Мышь |
Клавиатура |
Левая клавиша |
ENTER (ВВОД) |
Правая клавиша |
ESC |
В случае ответа на вопросы (Y/N):
Мышь |
Клавиатура |
Левая клавиша |
Y |
Правая клавиша |
N |
Функциональные клавиши
Клавиша |
Назначение |
ENTER |
выбор |
ESC |
отказ |
F1 |
подсказка о функциональных клавишах данного режима (высвечивается в двух нижних строках) |
F3 |
установка курсора в середину экрана (на случай, если он пропал из поля зрения). |
F4 |
активизация сервис-меню. Возврат из сервис-меню в режим курсора осуществляется нажатием клавиши “ESC” или соответствующей клавиши на мышке |
F5 |
передвижение курсора в ближайший шарнир (устройство), при этом координаты будут отсчитываться относительно этого шарнира (точки). |
F6 |
аналогично F5, без смены точки отсчета координат |
F7 |
переключение координат курсора - либо декартовы , либо полярные (угол, расстояние) |
F8 |
ввод с клавиатуры точки, в которую переместить курсор, перемещение происходит относительно текущей позиции курсора Возможны два формата:
|
F9 |
деление шага курсора на 2 |
F10 |
умножение шага курсора на 2 |
|
клавиши стрелок - для передвижения курсора |