

2.2 Синтез контура регулирования скорости.
Вычислим коэффициент усиления регулятора скорости при аС=аТ=2:
![]() 0,02*2,6*0,0465/0,04*2*2*0,006=2,52
0,02*2,6*0,0465/0,04*2*2*0,006=2,52
где kО,М= kО,Т/c=0,05/2,5=0,02; βе=с2/ RЯ∑=2,52/2,4=2,6 Н*м*с;
kО,С= UЗ,С MAX/ ωЗ,С MAX =10/261,25=0,04 В*с;
Передаточная функция регулятора скорости
WР,С= (ТЯр+1)/ТИр,
Где ТИ=kО,Т *kР,С*2*Тμ/RЯ∑ - постоянная интегрирования ПИ-регулятора.
ТИ=0,05*2,52*2*0,006/2,4=0,00063 с.
Передаточная функция будет иметь вид
WР,С= (0,019р+1)/0,0063р
Задавшись сопротивлением
RО,С,С= 100 кОм, определим сопротивление RЗ,С
RЗ,С= RО,С,С/ kР,С=100/2,52=40 кОм
Определим ЭДС тахогенератора при ω= ωЗ,С MAX=261,25 1/с
ЕТГ MAX= kТГ* ωЗ,С MAX=0,033*261,25/0,1045=82,5 В
Рассчитаем сопротивление RО,С:
RО,С= RЗ,С* ЕТГ MAX/ UЗ,С MAX=40*82,5/10=330 кОм
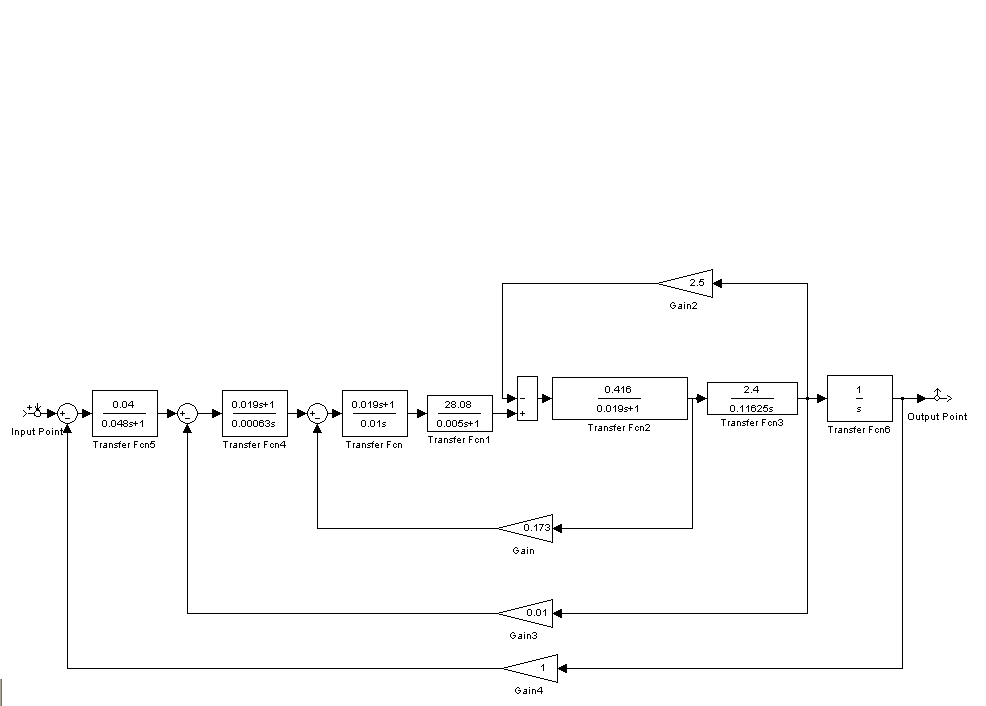
2.3 Синтез контура регулирования положения.
Передаточная функция регулятора положения
WР,П= kО,С / kИ.П.* аС*аТ*аП* Тμ р+1
аС=аТ=аП=2
Передаточная функция будет иметь вид
WР,П=0,04/0,048р+1
Задавшись сопротивлением
RО,С,П= 100 кОм, определим сопротивление RЗ,П
RЗ,П= RО,С,П/ kИ,П=100/10=10 кОм
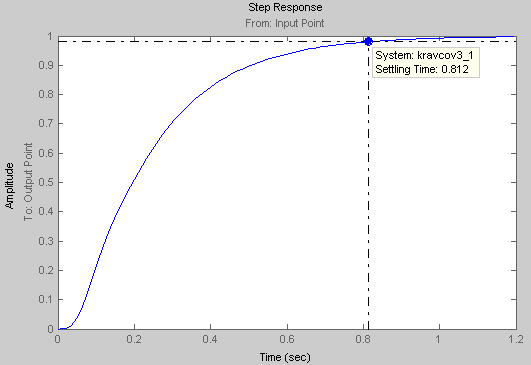
Для улучшения качества переходного процесса добавляем звено Gain 1 с коэффициентом 4,19.
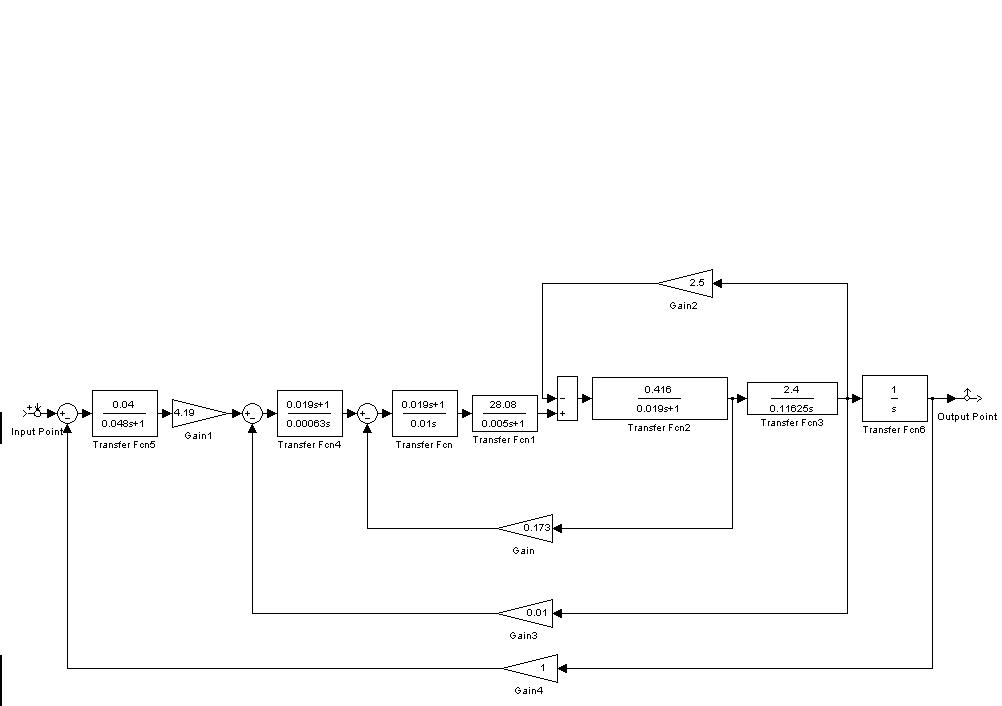
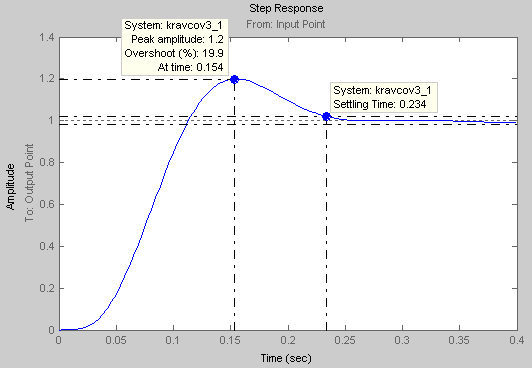
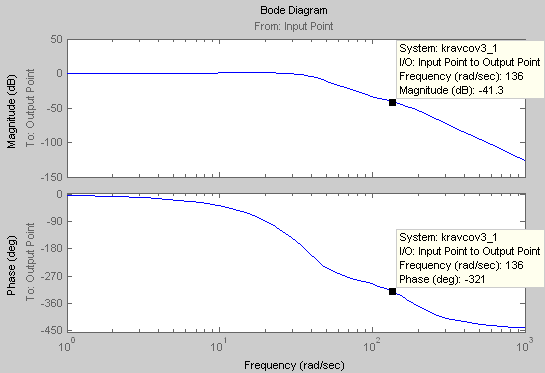
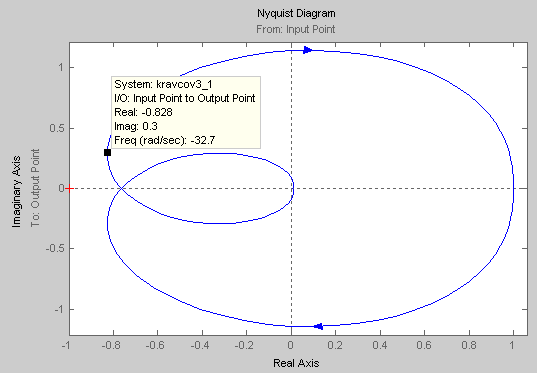
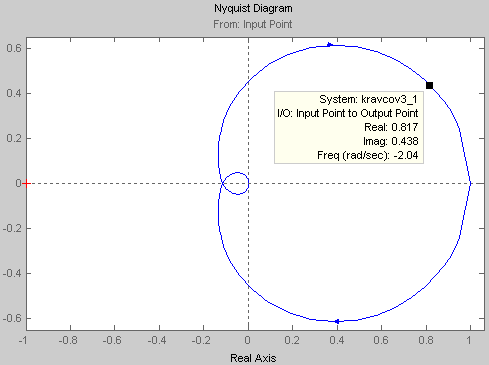
Система устойчива и соответствует заданным требованиям.