

Министерство образования и науки РФ
Казанский государственный университет им.А.Н.Туполева
Факультет Автоматики и Электронного приборостроения
кафедра ПИИС
Дополнительные материалы к лекциям по дисциплине:
Приборы первичной информации
ТЕТРАДЬ №3
Тема: Деформационные
преобразователи
измерителей
механических величин
Составитель: доц. каф. ПИИС
А.А. Порунов
Казань 2012
СОДЕРЖАНИЕ
1. Структурное представление деформационного преобразователя…………….3
2. Погрешности деформационных преобразователей…………………………….8
2.1.Температурные погрешности деформационных преобразователей…………8
3. Несовершенство упругих свойств деформационного преобразователя……..10
3.1. Определение упругого последействия……………………………………….13
4. Трубчатые деформационные преобразователи………………………………..14
5. Материалы, применяемые для изготовления упругих элементов…..……….17
6. Материалы, применяемые для изготовления упругих элементов……………20
7. Выбор допускаемых напряжений……………………………………………….24
8. Расчет упругих элементов………………………………………………..……..25
9. Биметаллические чувствительные элементы…………………………………..27
10. Термобиметаллические пружины ………………………………………………30
11. Мембраны и мембранные коробки ……………………………………………..33
12. Мембранные коробки……………………………………………………………35
13. Сильфоны ………………………………………………………………………..36
14. Расчет сильфонов………………………………………………………………..38
Заключение
Список литературы
1. Структурное представление деформационного преобразователя
ДП как любой измерительный преобразователь имеет как статические, так и динамические характеристики. В ДП происходит преобразование измеряемой величины (естественная входная величина) в измерительных механических величинах может быть сосредоточена сила, крутящий момент (пара сил), давление газа или жидкости) в усилие Т, которое деформирует упругий чувствительный элемент и уравновешивается возникающими в нем упругими силами.
Представленная последовательность процесса преобразования может быть представлена в виде
:
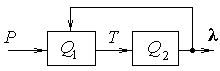
Рис.1 Структурная схема деформационного преобразователя
Т – тяговое усилие.
Первый элемент преобразователь, представляет процесс преобразования распределенной силы (давления) в сосредоточенную силу Т, которая, как правило, считается приложенной к так называемой измерительной точке УЧЭ (для мембран и сильфонов измерительная точка обычно совпадает с центром масс).
Второй преобразователь представляет процесс преобразования сосредоточенной силы Q в абсолютную деформацию упругого элемента λ, при этом величина деформации существенно влияет на чувствительность первого преобразователя
![]() (1.1)
(1.1)
где
Q
- тяговое усилие;
![]() - площадь УЭ или перестановочная сила.
Для УЭ с линейной функцией преобразования
по давлению эффективная площадь УЭ
является особенной величиной при расчете
- площадь УЭ или перестановочная сила.
Для УЭ с линейной функцией преобразования
по давлению эффективная площадь УЭ
является особенной величиной при расчете
 (1.2)
(1.2)
Чувствительность (податливость):
![]() (1.3)
(1.3)
![]() (1.4)
(1.4)
графически чувствительность определяется на основе функции преобразования (упругая характеристика ДП)
![]() (1.5)
(1.5)
mλ , mp – масштабы по осям координат
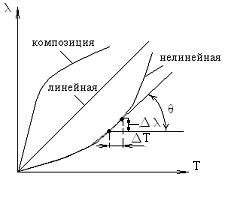
Рис.2. Виды функций преобразования
Величину обратную чувствительности принято в теории прочности называть жесткостью.
При применении нескольких ДП, результирующая чувствительность определяется с учетом их соединения. Различают последовательное, параллельное и смещенное соединение ДП, при их установке в приборах и на объекте контроля.
При последовательном соединении ДП в блоке каждый из них находится под воздействием одного и того же силового фактора и тогда чувствительность каждого из них определяется:
 (1.6)
(1.6)
При этом жесткость кж:
 (1.7)
(1.7)
Суммарную
деформацию блока ДП можно найти графически
суммированием деформации
![]() отдельных ДП, т.е.
отдельных ДП, т.е.
![]() .
(1.8)
.
(1.8)
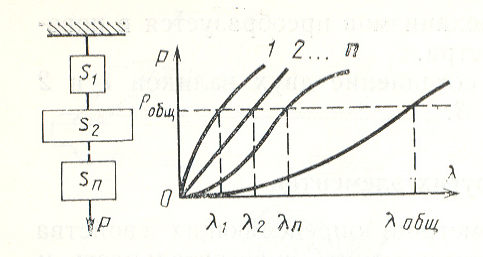
Рис.3. Последовательное соединение ДП в блок
При параллельном соединении ДП в блоке с различными ФП, при условии, что их деформации одинаковы и равны общей деформации блока, получим:
![]() (1.9)
(1.9)
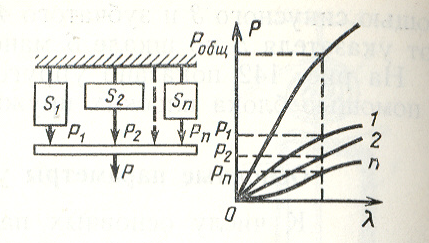
Рис.4. Параллельное соединение ДП в блок
Следовательно силовые факторы, действующие на каждый ДП при параллельном их соединении в блок, обратно пропорциональны их чувствительности
![]() (1.10)
(1.10)
откуда
![]() (1.11)
(1.11)
а чувствительность блока ДП в этом случае равна
 (1.12)
(1.12)
Следовательно, при параллельном соединении ДП в блок их суммарная чувствительность уменьшается, а общая жесткость равна сумме жесткостей
![]() (1.13)
(1.13)
При смешении соединений ДП в блоке их чувствительности (или жесткости) определяют по отдельности для каждой из групп соединений ДП. Это соединение встречается крайне редко.
При исследовании и расчете характеристик и параметров ДП важно понятие эффективной площади упругого элемента ДП. Эта часть полной площади УЭ ДП, которая наиболее активно подвергается деформации при его нагружении силовым фактором.
В зависимости от того изменяется ли Sэфф при изменении деформации функции преобразования ДП могут быть линейными или нелинейными. В случае, если Sэфф инвариантна к деформации, т.е. она постоянна, ФП будет линейна и влиянием изменения λ на Sэфф пренебрегают. Наоборот, если Sэфф существенно зависит от λ, то ФП – нелинейна и тогда в структурном представлении ДП необходимо ввести обратную связь как показано на рис.1. В этом случае тяговое усилие Т определится зависимостью:
 .
(1.14)
.
(1.14)
Эффективную площадь принято определять по приближенным формулам теории прочности.
Динамические свойства УЭ ДП в значительной мере определяют динамические характеристики ППИ, в которые они входят.
Для ППИ, работающих в ЖС (морская вода, кровь и т.д.) определение динамических характеристик имеет первостепенное значение. Поэтому в таких случаях необходим учет не только массы самих УЭ ДП, но и присоединенных масс. УЭ ДП представляют собой системы с распределенными параметрами и расчет резонансных частот их измерительных точек сложен. Этому вопросу посвящено большое число работ, основополагающими из них следует считать работу Тимошенко С.П. Колебания в инженерном деле. – М.: Наука, 1967. – 444с.
В инженерной практике после разработки ДП и ППИ в целом их динамические свойства определяют в основном экспериментально, методом определения либо переходных (во временной области), либо частотных характеристик.
Для резонансных частот позволяющей получить приближенную оценку динамических свойств ДП, например мембранных датчиков давления необходимо предварительно определить величину объем среды, прилегающего к упругой поверхности мембраны при ее прогибе.
Этот объем, например для плоских мембран, определяется по формуле
![]() (1.15)
(1.15)
где
R
– радиус мембраны; λ0
– прогиб мембраны; z
– конструктивный параметр равный z=f![]() ,
t0,
t
– начальная и текущая толщина мембраны.
Значение z
можно найти в работе [1].
,
t0,
t
– начальная и текущая толщина мембраны.
Значение z
можно найти в работе [1].
Величину присоединенного объема V при практических разработках целесообразно целесообразно определять экспериментальным путем (см. приложение 1 кн.:[2]