

30. Структурная схема следящего управления рулевым электроприводом
Система следящего управления может быть создана путем замыкания входа и выхода разомкнутой системы (рис. 10.18 ) через соответствующие преобразующие устройства.
Внутри следящего контура оказываются последовательно включенными два интегрирующих звена СР и РМ. Такие системы являются структурно неустойчивыми. Для придания устойчивости одно из интегрирующих звеньев должно быть охвачено жесткой обратной связью.
Широко распространены схемы (рис. 10.18 ), где обратной связью охвачены два звена: рулевая машина РМ и насос регулируемой подачи.

Рис. 10.18. Структурная схема следящего управления РЭГ-приводом с механической обратной связью
При обратном соотношении в рулевом электроприводе возникают автоколебания, т.е. перо руля даже в отсутствие управляющего сигнала совершает самопроизвольные колебания влево-вправо по отношению к диаметральной плоскости судна.
Для подавления автоколебаний в схему управления рулевым электроприводом вводят отрицательную обратную связь по выходному напряжениию, при помощи которой часть сигнала ( напряжения ) с выхода оконечного каскада усилителя подают в противофазе на вход усилителя.
В результате коэффициент усиления усилителя по напряжению ( а значит, и по мощности ) уменьшается, но достигается главное – исчезают автоколебания пера руля.
При подаче сигнала α на вход суммирующего устройства А баллер руля повернется на соответствующий угол α.
Таким образом, задача следящего управления рулем превращается в задачу синфазного поворота поста управления ПУ и выходного органа сервомеханизма (СР, ГУ) α .
Общая схема следящего управления рулем распадается на два независимых замкнутых контура I и II.
Поворот поста управления ПУ на некоторый
угол вызывает перемещение выхода
сервомеханизма на тот же угол, что в
свою очередь определит угол перекладки
руля. Элементы К и
К
и
К являются преобразователями углового
поворота в эквивалентные электрические
сигналы.
являются преобразователями углового
поворота в эквивалентные электрические
сигналы.
При разомкнутом контуре II возможно простое управление рулем.
Постом управления непосредственно на вход усилителя подается управляющий сигнал. Серводвигатель СР через ГУ или, в случае его отсутствия, через кинематический механизм перемещает на некоторый угол α задающий элемент, угол поворота которого после отработки определит положение руля.
Контроль перекладки производится по двухстрелочному аксиометру заданного и действительного положения руля. Датчики аксиометра связаны соответственно с заданным α и фактическим α углами поворота пера руля. Отключение серводвигателя производится по достижении α требуемого значения.
31. Структурная схема автоматического управления рэп
Рассмотренные решения по обеспечению устойчивости работы системы управления рулевого электропривода (см. рис. 10.18) не являются единственно возможными. За последнее время появились новые структурные схемы управления рулем (АТР, АИСТ), где для обеспечения структурной устойчивости в следящем и автоматическом режимах обратной связью охватывается не рулевая машина, а серводвигатель (рис. 10.19 ).
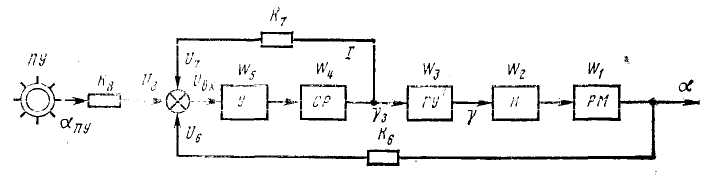
Рис. 10.19. Структурная схема управления РЭГ-приводом с электрической обратной связью
При работе в следящем режиме общий сигнал, подаваемый на вход усилителя, состоит из трех составляющих:
U
=
U
-
U
-
U ,
,
где U
-
напряжение, пропорциональное повороту
α поста
управления;
поста
управления;
U - напряжение, пропорциональное перемещению γ золотника гидроусилителя;
U - напряжение, пропорциональное углу α поворота пера руля.