

25. Поршневые машины с качающимися цилиндрами
Рулевые машины рассматриваемого типа используются в отечественном и иностранном судостроении.
Типовая схема привода с двумя рабочими цилиндрами, наиболее распространенная на морских судах, показана на рис. 10.12.

Рис. 10.12. Кинематика рулевой машины с качающимися цилиндрами
Цилиндры 3 имеют проушины с бронзовыми втулками и через вертикальные шкворни 2 связаны с фундаментом 1. Шкворни 2 являются осью поворота цилиндра.
В цилиндрах размещаются поршни 4, штоки 5 которых связаны с двухплечным румпелем 7. Штоки и поршни имеют специальные уплотнения, резиновые или кожаные набивки 6.
Цилиндры двойного действия: обе полости А и Б являются рабочими. Каждый си-
ловой цилиндр используется как для прямой, так и для обратной перекладки руля.
При подаче масла в полость А и сливе из полости Б происходит перекладка руля почасовой стрелке. При подаче масла в полость В — наоборот.
Полости А и Б обоих цилиндров связаны трубопроводом через клапанную распре-
делительную коробку. Следует заметить, что во втором цилиндре рабочая полость А имеет шток аналогично полости Б первого цилиндра.
Углы качания цилиндров, хотя и различны, но даже при бортовых положениях руля ±35° не превышают 4 - 5°. Поэтому суммарные объемы подачи и слива жидкости практически одинаковы.
Вместе с тем, учитывая равенство давлений масла в полостях нагнетания и меньшую поверхность поршня со стороны штока, усилия, передаваемые на каждое плечо румпеля, будут различаться, что вызывает появление хотя и небольшой, дополнительной изгибающей силы на голове баллера.
Подвод масла к рабочим полостям каждого цилиндра производится через герметичное шарнирное соединение внутри шкворня 2 или посредством гибких поли-пропиленовых шлангов, как это принято при производстве рулевых машин данного типа.
26. Принцип действия руля
При установившемся прямолинейном движении судна руль, находящийся в диамет
ральной плоскости, испытывает с обеих сторон одинаковое давление набегающих струй воды.
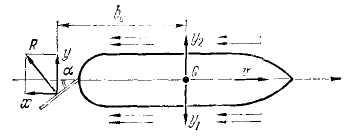
Рис. 10.1. Силы, действующие на судно при отклонении руля
При отклонении руля на угол α (рис. 10.1 ) равновесие нарушается. На поверхности пера руля, обращенной к набегающему потоку, силы давления увеличиваются.
Поле давления может быть представлено равнодействующей силой R, приложенной в центре давления. Направление действия силы R в первом приближении удобно считать нормальным относительно плоскости пера руля.
Равнодействующая сила R может быть разложена на две составляющие х и y по взаимно перпендикулярным осям, одна из которых располагается по линии курса судна, а другая - нормально к ней.
Поместим в центр тяжести судна - в точку О - две взаимно уравновешивающиеся силы у1 и у2, равные и параллельные боковой силе у.
Силы у1 и у составляют пару сил, плечо которой примерно можно считать равным половине длины судна L. Они образуют момент, поворачивающий судно в сторону перекладки руля
Мпов = у (
10.1 ),
(
10.1 ),
Этот момент и определяет поворот судна при отклонении руля.
Сила у2, называемая силой дрейфа, сносит судно боком во внешнюю сторону описываемой им дуги и создает из-за наличия метацентрической высоты крен судна.
Сила х создает дополнительное сопротивление движению судна ( тормозит его ).
Таким образом, задача поворота судна сводится к перекладке пера руля в необходимую сторону на угол, определяющий нужную эффективность управляющего воздействия.
Обобщенная сила R одновременно создает противодействующий момент на баллере руля, который является нагрузкой для электропривода.