

8.1.1. Вибрации в конструкциях рэс
Под вибрацией аппаратуры понимают механические колебания ее элементов или конструкции в целом.
Вибрация может быть периодической и случайной. Периодическая вибрация может быть гармонической и полигармонической.
Гармоническая вибрация сравнительно редко встречается в реальных условиях, но широко используется при лабораторных испытаниях и при анализе динамических характеристик конструкции и для определения реакции системы при более сложных формах вибрации.
Параметрами воздействия вибрации являются частота и ускорение.
Гармоническая
вибрация описывается законом
виброперемещения Z(t),
виброскорости![]() или виброускорения
или виброускорения![]() .
.![]()
![]() ;
;
![]() ;
;
![]() ,
,
где SZ – амплитуда виброперемещения;
– круговая частота вибрации, 1/с.
t – время, с.
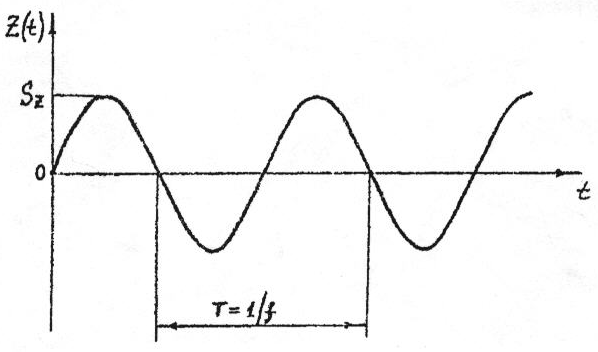
Рисунок 8.1 – Виброперемещение при гармонической вибрации
Как известно, круговая частота связана с частотой вибрации f(Гц) выражением
= 2f.
По заданному
значению виброперемещения при
гармонической вибрации легко найти
амплитуду виброскорости
![]() и виброускорения
и виброускорения
![]() :
:
=SZ=2fSZ;
![]() =2SZ=42f2SZ.
=2SZ=42f2SZ.
Если же задано максимальное значение (амплитуда) виброускорения, то амплитуда гармонической вибрации равна:
![]() .
.
Амплитуда виброускорения часто задается в единицах ускорения свободного падения g, (g = 9,81 м/с2).
В этом случае амплитуда виброперемещения (в миллиметрах) равна:
![]() [мм],
[мм],
где
![]() – амплитуда виброускорения в единицах
g.
– амплитуда виброускорения в единицах
g.
В реальном случае РЭС подвергается влиянию целого спектра частот вибрации, т.е. вибрация сложная периодическая - полигармоническая.

Рисунок 8.2 – Виброперемещение при гармонической вибрации
Из-за ограниченных энергетических возможностей источников вибрации высшие гармоники имеют малую амплитуду. Поэтому, а также из-за трудностей учета всех гармоник, в рассмотрение принимают главным образом низкочастотную часть спектра и, в первую очередь, гармоники с относительно большими амплитудами.
8.1.2. Линейное и центробежное ускорение в конструкциях рэс
Линейное ускорение характеризуется величиной ускорения и возникает при изменении скорости движения; центробежное возникает при изменении направления движения. Влияние линейного и центробежного ускорений на РЭС одинаково и зависит лишь от их величины.
При расчетах аппаратуры, работающей в условиях линейных ускорений, последние обычно считаются равными максимальному их значению за все время действия, либо изменяющимися по ступенчатому или линейному закону. Линейное ускорение часто задается в виде перегрузки – отношения действующего ускорения к ускорению свободного падения.

Рисунок 8.3 – Пример изменения линейного ускорения
8.1.3. Удары в конструкциях рэс
Аппаратура может подвергаться ударным воздействиям, возникающим при транспортировке, монтаже или эксплуатации, при действии ударной волны и т.д.
Удар – кратковременное (длительностью менее 0,1 с) и непериодическое силовое воздействие на элементы конструкции со стороны объекта-носителя. Удар характеризуется длительностью импульса и ускорением. Интенсивность ударного воздействия зависит от формы, амплитуды U и длительности ударного импульса.
Формой ударного импульса называется зависимость ударного ускорения от времени u(t). Для упрощения при расчетах форму ударного импульса идеализируют, заменяя ее подходящей более простой формой, например – прямоугольной, треугольной, полусинусоидальной и т.д.
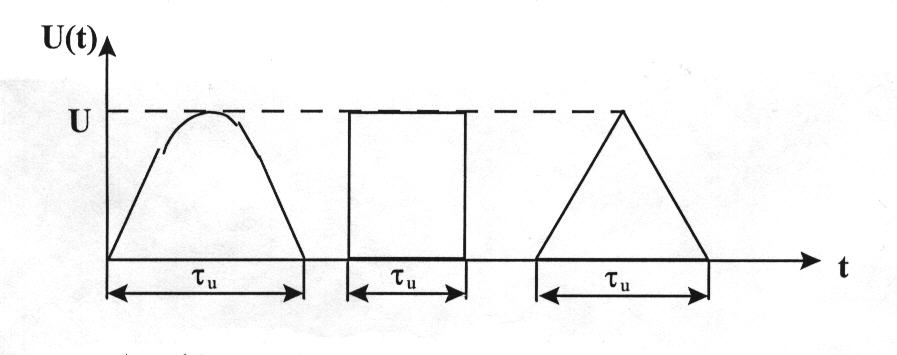
Рисунок 8.4 – Форма ударного импульса
В процессе эксплуатации аппаратура может подвергаться действию не только одиночных, но и многократных ударов. В этом случае нормируется количество ударов и минимальный период их следования.
Ударные воздействия возникают также при падении блока с некоторой высоты H. Такой вид удара имеет место, в частности, при небрежной перестановке блока РЭС на новое место, при погрузочно-разгрузочных работах.