

1) Простые движения при нажиме кнопки, клавиши, повороте регулятора.
О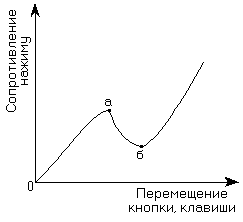 ператор
должен четко ощутить процесс подготовки
(о-а), процесс нажатия или поворота (а-б)
и его завершение (б).
ператор
должен четко ощутить процесс подготовки
(о-а), процесс нажатия или поворота (а-б)
и его завершение (б).
Нарушение характера зависимостей на участках приводит к нарушению нормального хода процесса управления.
Рисунок 6.2
Простые повторяющиеся движения вращательного, нажимного или ударного характера. Требуют соблюдения тех же зависимостей, что и для 1 класса. За счет повторяемости и возможности прогнозирования характера движения обеспечивается повышение скорости ввода сигналов управления.
Сложные движения при выполнении точной настройки регулятором по какой-либо программе (настройка приемника на станцию). Основным параметром, определяющим полное время управляющих движений, является передаточное число U, которое представляет собой отношение перемещения указателя А (в см) к числу полных оборотов рукоятки n (оптимальным является значение U=2,5…5 см/об):
![]() .
.
Сложные движения при выполнении операции слежения за объектом, параметры которого меняется в процессе работы. Возможны два варианта таких задач: компенсирующее слежение и слежение с преследованием. При компенсирующем слежении оператор имеет данные только о разности параметров и не может предсказать их изменение. При слежении с преследованием он воспринимает весь ход изменения входного и выходного сигнала и прогнозирует ход работы. Точность слежения повышается в 1,5…2 раза.
Для оптимизации работы Ч-О в роли "машины" управления необходимо знать следующее:
- количество рабочих движений должно быть минимальным;
- количество органов управления должно быть минимальным;
- расположение органов управления должно соответствовать последовательности их применения при работе;
- движение регулятора и указателя должны соответствовать друг другу;
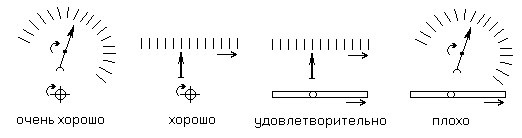
Рисунок 6.3 – Варианты сочетаний движений регулятора и указателя
- при управляющих действиях следует в первую очередь применять вертикальные движения рук. (Пример: ребенок легко усваивает, где верх и низ и с трудом распознает право и лево);
- компонуя пульт, рассчитывай на работу двумя руками, следует наиболее ответственные органы управления размещать в зоне действия левой руки;
- наибольшая частота ошибок допускается при отработке сигнала поворотными движениями рук (в 5 раз чаще, чем при вертикальных движениях). Если этого избежать нельзя, то нужно помнить:
- при поворотных движениях вероятность ошибочных реакций на сигнал, предназначенный для левой руки меньше, чем на сигнал правой;
- вероятность ошибки при повороте по часовой стрелке меньше, чем против часовой.
- при клавишном управлении наивысшей активностью движения обладает указательный палец левой руки. Низшая активность - у безымянного пальца правой руки. Относительная активность левой руки выше правой.
- движение рук к себе более быстры, но менее точны, а от себя - более точны, но менее быстры.
По конструкции все регуляторы делятся на нажимные, движковые, рычажные и вращательные.
Нажимные регуляторы - кнопочные и клавишные
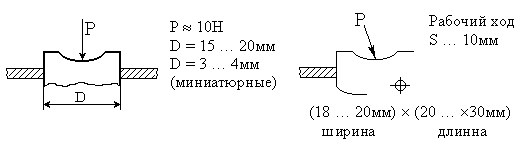
Рисунок 6.4
Ригельные (движковые) регуляторы
И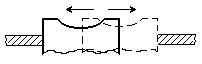 меют
два четко фиксируемых положения. Следует
использовать при небольших усилиях
переключения. Не очень надежны в работе.
меют
два четко фиксируемых положения. Следует
использовать при небольших усилиях
переключения. Не очень надежны в работе.
Рисунок 6.5
3) Рычажные регуляторы
Э то
- головки тумблеров и больших качающихся
рычагов. Должны иметь четко различающийся
угол отклонения. Размеры головки должны
быть удобны для захвата пальцами или
всей рукой.
то
- головки тумблеров и больших качающихся
рычагов. Должны иметь четко различающийся
угол отклонения. Размеры головки должны
быть удобны для захвата пальцами или
всей рукой.
Рисунок 6.6
4) Вращательные регуляторы
И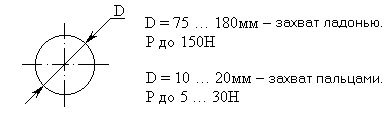 меют
плавное или скачкообразное движение
рабочего элемента.
меют
плавное или скачкообразное движение
рабочего элемента.
Рисунок 6.7