Вопрос №1 Гидравлические машины. Основные термины. Классификация по принципу действия. Устройство.
Гидравлическими машинами называются машины, которые сообщают протекающей через них жидкости механическую энергию (насос), либо получают от жидкости часть энергии и передают её рабочему органу для полезного использования (гидравлический двигатель).
Видов, типов и конструкций гидромашин существует большое количество, но все они могут быть разделены по принципу действия на два вида: объёмные и динамические.
О бъёмные
гидромашины
(к которым относятся поршневые,
шестерённые, радиально- и аксиально-поршневые
и т.д.) работают за счёт изменения объёма
рабочих камер, периодически соединяющихся
с входным и выходным патрубками.
Простейшей объёмной гидромашинной
является поршневой насос. При движении
поршня 1
вправо
объем поршневой полости увеличивается
при этом создается разрежение и жидкость
всасывается в цилиндр 2
через клапан 3.
При обратном
ходе поршня объем поршневой полости
уменьшается, давление в ней увеличивается
и происходит вытеснение жидкости через
нагнетательный клапан 4.
бъёмные
гидромашины
(к которым относятся поршневые,
шестерённые, радиально- и аксиально-поршневые
и т.д.) работают за счёт изменения объёма
рабочих камер, периодически соединяющихся
с входным и выходным патрубками.
Простейшей объёмной гидромашинной
является поршневой насос. При движении
поршня 1
вправо
объем поршневой полости увеличивается
при этом создается разрежение и жидкость
всасывается в цилиндр 2
через клапан 3.
При обратном
ходе поршня объем поршневой полости
уменьшается, давление в ней увеличивается
и происходит вытеснение жидкости через
нагнетательный клапан 4.
Рабочим органом, непосредственно совершающим работу вытеснения, является в объемном насосе вытеснитель — поршень (плунжер), пластины, зубчатое колесо, диафрагма и т. д.
Под рабочей камерой насоса (гидродвигателя) понимается ограниченное изолированное пространство, образованное деталями насоса с периодически увеличивающимся и уменьшающимся при работе насоса объемом и попеременно сообщающееся соответственно с нагнетательным и всасывающими каналами.
В динамических насосах жидкость движется под силовым воздействием в камере, постоянно соединенной с входным и выходным патрубками. К динамическим относится большая группа лопастных насосов, вихревые струйные и другие типы насосов.
Лопастной машиной называется устройство, предназначенное для преобразования энергии потока жидкости или газа в энергию вращательного движения или наоборот. Рабочим органом лопастной машины является вращающийся ротор, состоящий из рабочего колеса и вала. Рабочим колесом называется система лопастей.
К гидравлическим лопастным машинам относятся лопастные насосы, гидротурбины, гидравлические динамические муфты и трансформаторы крутящего момента.
Ц ентробежный
насос состоит из рабочего колеса 1
с криволинейными лопастями, посаженного
на вал 2, и камеры 3, в
которой располагается рабочее колесо.
По входному патрубку 4 жидкость
подается к центральной части рабочего
колеса и выбрасывается из него в
спиральную отвод 3, переходящий
в короткий диффузор – напорный патрубок
5. Рабочее колесо центробежного
насоса состоит из ведущего а и
ведомого (обода) б дисков, между
которыми находятся лопатки в,
изогнутые, как правило, в сторону,
противоположную направлению вращения
колеса. Ведущим диском рабочее колесо
крепится на валу. В центробежном насосе
на жидкость, заполняющую каналы между
лопастями колеса и вращающуюся вместе
с ним, действует центробежная сила и
отбрасывает её от центра колеса на
периферию, создавая повышенное давление
на периферии и разрежение в центре.
Поэтому постоянно происходит всасывание
жидкости в подводящее отверстие.
ентробежный
насос состоит из рабочего колеса 1
с криволинейными лопастями, посаженного
на вал 2, и камеры 3, в
которой располагается рабочее колесо.
По входному патрубку 4 жидкость
подается к центральной части рабочего
колеса и выбрасывается из него в
спиральную отвод 3, переходящий
в короткий диффузор – напорный патрубок
5. Рабочее колесо центробежного
насоса состоит из ведущего а и
ведомого (обода) б дисков, между
которыми находятся лопатки в,
изогнутые, как правило, в сторону,
противоположную направлению вращения
колеса. Ведущим диском рабочее колесо
крепится на валу. В центробежном насосе
на жидкость, заполняющую каналы между
лопастями колеса и вращающуюся вместе
с ним, действует центробежная сила и
отбрасывает её от центра колеса на
периферию, создавая повышенное давление
на периферии и разрежение в центре.
Поэтому постоянно происходит всасывание
жидкости в подводящее отверстие.
Вопрос №2 Роторные объемные насосы, классификация, общие свойства, обратимость гидромашин.
По характеру движения рабочих камер различают объемные насосы с неподвижными рабочими камерами и роторные насосы. К насосам первого типа относятся поршневые, плунжерные и диафрагменные. В этих насосах вытеснение жидкости происходит из неподвижных рабочих камер вытеснителями, совершающими возвратно-поступательные движения (общее свойство).
В гидроприводах применяют преимущественно роторные насосы, под которыми понимают объемные насосы с вращательным или вращательным и возвратно-поступательным движением рабочих органов независимо от характера движения ведущего звена насоса. При работе таких насосов происходит перенос вытесняемого объема жидкости из всасывающей полости в нагнетательную. Вытеснители этих насосов совершают вместе с ротором вращательное движение, которое может сочетаться с поступательным движением в камерах. По характеру движения вытеснителей различают роторно-поступательные насосы (роторно-поршневые, шиберные) и роторно-вращательные (шестеренные, винтовые). Шестеренные насосы (рис. а) состоят из двух или более шестерен 4 и 5, размещенных в корпусе 6 с каналами А и Б. При данном направлении вращения, жидкость заполняет впадины между зубьями и переносится из полости всасывания в полость нагнетания.
Конструктивные схемы объемных машин: а – шестеренный насос; б – винтовой; в, г – аксиально-поршневые насосы; д – радиально-поршневой насос.
Винтовые насосы (рис. б) эффективны при высоких частотах вращения. Они имеют малую массу, высокие рабочие параметры (давление и частоту вращения), равномерность подачи, они компактны и бесшумны при работе. Недостаток – сложность изготовления винтов. Данный насос имеет три винта: ведущий 7 и два ведомых 8 с противоположной нарезкой винтов. Винты в зацеплении образуют рабочие камеры, которые при вращении перемещаются вместе с жидкостью вдоль оси напорной гидролинии.
В гидроприводах высоких давлений наиболее часто применяются роторно-поршневые насосы с осевым (аксиальные – рис. в и г) и радиальным (рис. д) расположением поршней в блоке цилиндров.
По виду передачи движения аксиально-поршневые насосы бывают: с наклонным блоком 1 (рис. в) и с наклонным диском (рис. г). В первых насосах поршни 3 через шатуны 9 со сферическими головками соединены с фланцем вала 10. При вращении вала поршни совершают возвратно-поступательные движения. Во вторых насосах плунжеры 11 прижаты к шайбе 12. При вращении вала 10 и ротора плунжеры совершают возвратно-поступательное движение. Окна неподвижной плиты 13 обеспечивают поочередное соединение цилиндров с полостями всасывания и нагнетания 2. Регулированием угла γ изменяется подача насоса.
В радиально-поршневом насосе (рис. д) ротор 14 расположен эксцентрично относительно статора 15. При вращении ротора вокруг неподвижной оси 16 поршни совершают возвратно-поступательное движение. Всасывание рабочей жидкости производится из полости А, нагнетание – в полость Б. Регулированием эксцентриситета изменяется подача насоса.
Роторные насосы имеют следующие свойства: обратимость (могут работать как насосы и моторы); быстроходность (частота вращения вала до 3000…5000 об/мин); равномерность подачи; работа только на чистых неагрессивных жидкостях, обладающих смазывающими свойствами. Не работают на воде.
Вопрос №3 Объемный гидропривод и гидропередача. Классификация. Основные компоненты. Схемы и принцип действия. Расчет гидропередачи.
Объемный гидропривод это гидравлическая система, включающая объемные насос и гидродвигатель и устройства управления и контроля. Эта система служит для передачи энергии на расстояние с помощью жидкости, и преобразования ее в механическую работу на выходе системы с одновременным выполнением функций регулирования и реверсирования скорости выходного звена гидродвигателя, а также преобразования одного вида движения в другой.
Объемная гидропередача – это часть объемного гидропривода, состоящая из объемного насоса, объемного гидродвигателя и соединяющих их гидролиний (трубопроводов).
Гидролиния – устройство, предназначенное для прохождения рабочей среды в процессе работы объемного гидропривода. Различают: всасывающую, напорную и сливную линии.
Под аппаратами управления понимают устройства, предназначенные для управления параметрами гидросистемы.
Гидросистемы могут быть с разомкнутой (жидкость всасывается и сливается в бак) и замкнутой циркуляцией рабочей жидкости.
Гидроприводы делятся на нерегулируемые и регулируемые (изменяется скорость и нагрузка на выходном звене); регулируемые могут быть с дроссельным и объемным регулированием (устанавливается дроссель или регулируемые объемные гидромашины).
П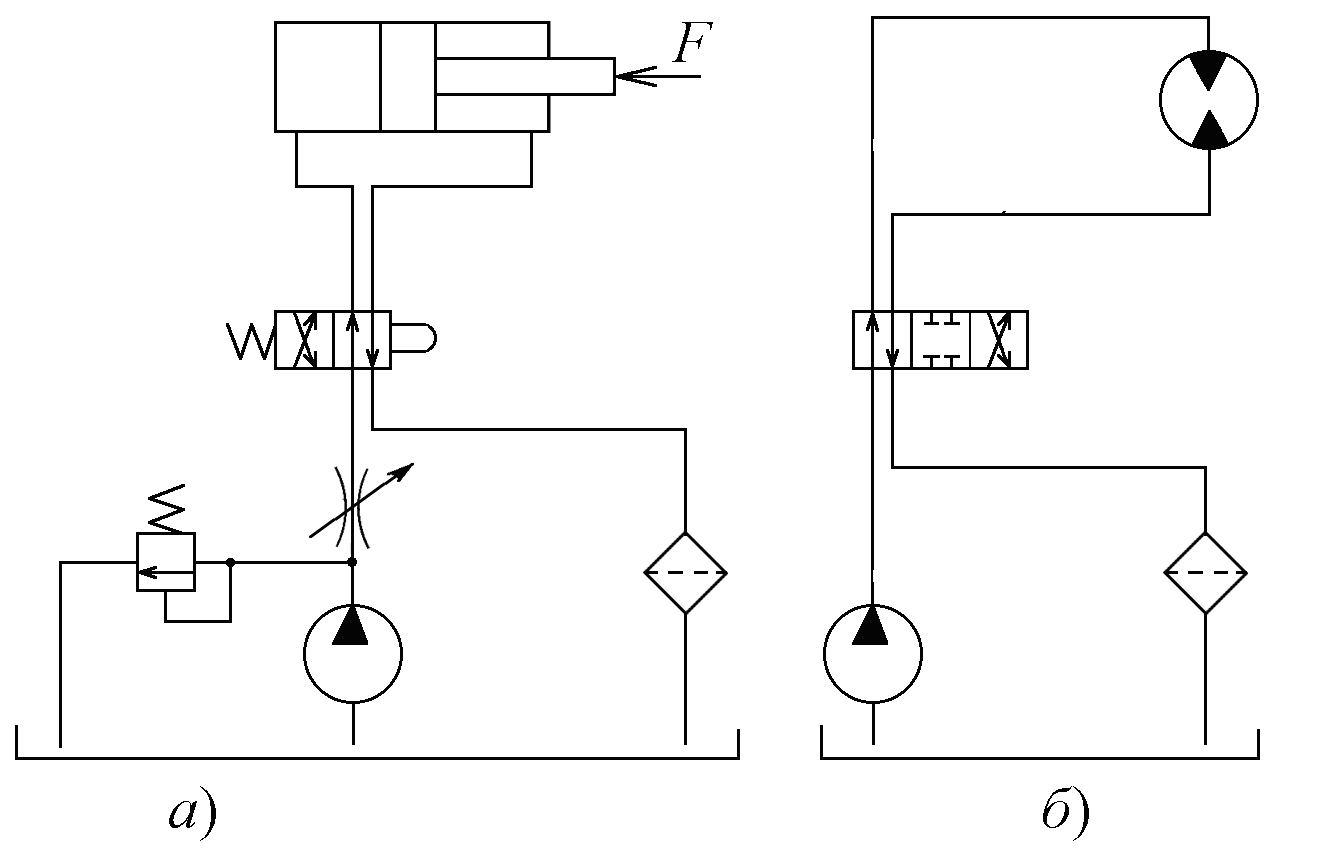 о
типу применяемого гидродвигателя
объемные гидроприводы делятся на приводы
вращательного, возвратно-поступательного
и поворотного движения. Например: схемы
гидроприводов возвратно-поступательного
и вращательного движения.
о
типу применяемого гидродвигателя
объемные гидроприводы делятся на приводы
вращательного, возвратно-поступательного
и поворотного движения. Например: схемы
гидроприводов возвратно-поступательного
и вращательного движения.
Механическая энергия состоит из трех частей: энергии положения, потенциальной энергии давления и кинетической энергии. В объемных гидромашинах используется удельная потенциальная энергия давления (передаваемая жидкости насосом), которая с помощью объемных гидравлических двигателей преобразовывается в механическую работу; остальными видами механической энергии обычно пренебрегают.
Принцип действия объемных гидроприводов основан на высоком объемном модуле упругости (не сжимаемости) жидкости и на законе Паскаля: всякое изменение давления в какой-либо точке покоящейся капельной жидкости, не нарушающее ее равновесия, передается в другие точки без изменения.
Перепад давления на гидродвигателях определяется по формулам
– для
гидроцилиндра:
![]() ,
МПа, – для гидромотора:
,
МПа, – для гидромотора:![]() ,
МПа.
,
МПа.
Упрощенно это давление принимается
равным давлению насоса, а расход
гидродвигателя равен подаче насоса
![]() .
Расход гидромотора определяется по
формуле
.
Расход гидромотора определяется по
формуле
 ,
а гидроцилиндра
,
а гидроцилиндра
![]() .
Скорость гидродвигателя прямо
пропорциональна количеству поступающей
в него жидкости в единицу времени.
.
Скорость гидродвигателя прямо
пропорциональна количеству поступающей
в него жидкости в единицу времени.
Сила давления жидкости приводит в движение «выходное звено» гидропривода, преодолевая нагрузку и совершая полезную работу.
Общий (полный) КПД гидропривода
определяется как отношение полезной
мощности Nп
(гидродвигателя) к затраченной мощности
N (мощность, потребляемая
насосом):
![]() ,
%.
,
%.
Вопрос №4 Рабочий объем и расчетная подача, характерный объем, параметр регулирования для различных типов объемных гидромашин.
При вращении вала насоса объем его рабочих камер изменяется, причем при рабочем цикле объем уменьшается и его жидкость вытесняется в нагнетательную полость; для гидромотора объем камер при рабочем ходе увеличивается и жидкость заполняет рабочие камеры.
Указанное изменение
объемов камер насоса за один оборот
является рабочим
объемом q,
а за единицу времени – средней расчетной
подачей, которую также называют идеальной
подачей Qт.
Т.е. средняя
расчетная подача
насоса – это суммарное изменение объема
рабочих камер насоса в единицу времени.
Минутную теоретическую подачу
насоса Qт.н и
гидромотора Qт.м
рассчитывают по формуле:
![]() ,
м3/с
,
м3/с
Под одним рабочим циклом понимают разовое изменение объема рабочих камер от максимального значения до минимального. Исходя из этого, различают насосы однократного, двукратного и многократного действия, понимая под этим роторный насос, у которого жидкая среда вытесняется из замкнутой камеры соответственно один, два и несколько раз за один оборот ротора.
Для расчета динамических характеристик
подачу насоса определяют:
![]() ,
м3/с;
,
м3/с;
где
![]() – угловая скорость вращения вала, с-1;
w – характерный
(удельный) объем, м3.
– угловая скорость вращения вала, с-1;
w – характерный
(удельный) объем, м3.
Характерный объем – это среднее
значение геометрической подачи q
несжимаемой жидкости при отсутствии
утечек, приходящееся на один радиан
поворота ротора машины
![]() .
Характерный (удельный) объем w
является основным параметром критерия
механического подобия насосов различных
конструкций.
.
Характерный (удельный) объем w
является основным параметром критерия
механического подобия насосов различных
конструкций.
Под регулируемыми насосами понимаются
насосы, обеспечивающие в заданных
пределах изменение подачи. Для регулируемых
гидромашин подача при повороте ротора
на один радиан и соответственно средняя
расчетная подача Qт
является переменной величиной и может
быть оценена долей от наибольшей
возможной величины коэффициента
регулирования (безразмерного параметра
регулирования):
![]() ,
,
где ![]() и
и
![]() – значение характерного рабочего объема
при текущем (регулируемом) объеме
– значение характерного рабочего объема
при текущем (регулируемом) объеме
![]() и его максимальное значение при
и его максимальное значение при
![]() ;
;
![]() и
и
![]() – текущее и максимальное значения
регулируемого параметра; для радиальных
машин этим параметром является
эксцентриситет, а для аксиальных – угол
у наклона диска.
– текущее и максимальное значения
регулируемого параметра; для радиальных
машин этим параметром является
эксцентриситет, а для аксиальных – угол
у наклона диска.
Безразмерная величина
![]() может изменяться в регулируемых машинах
от +1 до -1 при помощи установки регулирующего
органа гидромашины. Для нерегулируемых
насосов
может изменяться в регулируемых машинах
от +1 до -1 при помощи установки регулирующего
органа гидромашины. Для нерегулируемых
насосов
![]() .
.
Средняя теоретическая подача регулируемого
насоса, выраженная через характерный
объем w и безразмерный
параметр регулирования
,
примет вид
![]() .
.
Вопрос №5 Объемные потери в гидромашинах, объемные характеристики насосов, объемный КПД.
Фактическая (эффективная) подача Qэф насоса – это подача жидкости при определенных значениях перепада давления Δр, частоте вращения n. Величина фактической подачи Qэф будет меньше расчетной Qт на величину объемных потерь ΔQ1 = Qт – Qэф, которые возникают:
― в результате утечек жидкости под действием перепада давления из рабочей полости в нерабочую ΔQ1;
― потерь на всасывании ΔQ2, обусловленных неполным заполнением рабочих камер жидкостью при проходе через зону всасывания вследствие гидравлического сопротивления входных каналов, кавитационных процессов и выделения воздуха, действия, на жидкость центробежных сил. Потери ΔQ2 могут составить в некоторых случаях 75% всех объемных потерь в насосе. Основными причинами неполного заполнения жидкостью рабочих камер являются малое давление на входе в насос, большое сопротивление всасывающих каналов, подводящих жидкость к распределительным окнам блока, сопротивление в распределительных окнах и в самих цилиндрах. Сопротивление всасывающей линии при малом давлении на входе в насос приводит к возникновению кавитации.
При увеличении частоты вращения пропорционально увеличивается количество жидкости, проходящей через подводящие каналы, узел распределения и потери напора. При дальнейшем повышении частоты вращения > n2 линейность фактической подачи насоса Qэф нарушается (рис. 7., а), а при некоторой большей частоте вращения она будет даже снижаться с увеличением n (насос будет работать в кавитационном режиме).
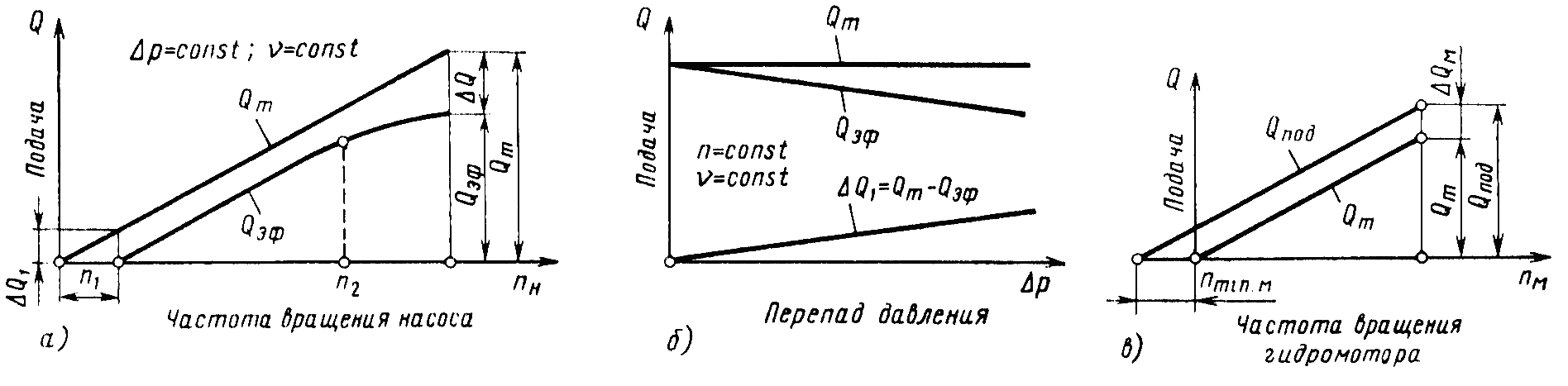
Рис. 7. – Объемные характеристики гидромашины
Непосредственные
утечки жидкости через зазоры гидравлических
машин изменяются при всех прочих равных
условиях прямо пропорционально перепаду
давления:
![]() ,
где
r
– коэффициент утечек.
,
где
r
– коэффициент утечек.
На
рис. 7., б
приведены графики принципиальной
зависимости подачи Q
насоса от величины перепада давления
Δp
при отсутствии ΔQ2
(при полном заполнении рабочих камер в
зоне всасывания) и при неизменных
зазорах. Зазоры
при изменении частоты вращения насоса
практически не изменяются, величина
утечек жидкости ΔQ1
через зазоры практически не зависит от
частоты вращения до определенного его
значения ≈ n2.
В соответствии с этим фактическая подача
Qэф
изменяется при этих условиях прямо
пропорционально частоте вращения.
Кривая подачи Qэф
будет при этом параллельна кривой Qт,
смещенной относительно нее на величину
ΔQ1.
При частоте вращения, меньше n1
насос не будет развивать требуемого
перепада давления, т. е. расчетная подача
равна утечкам (рис. 7., а): ![]() .
.
Объемные
потери в насосе характеризуются объемным
КПД, который показывает, насколько
фактическая подача Qэф
насоса отличается от средней теоретической
Qт:
![]() .
.
Н
Рис. 8
Кривые КПД насоса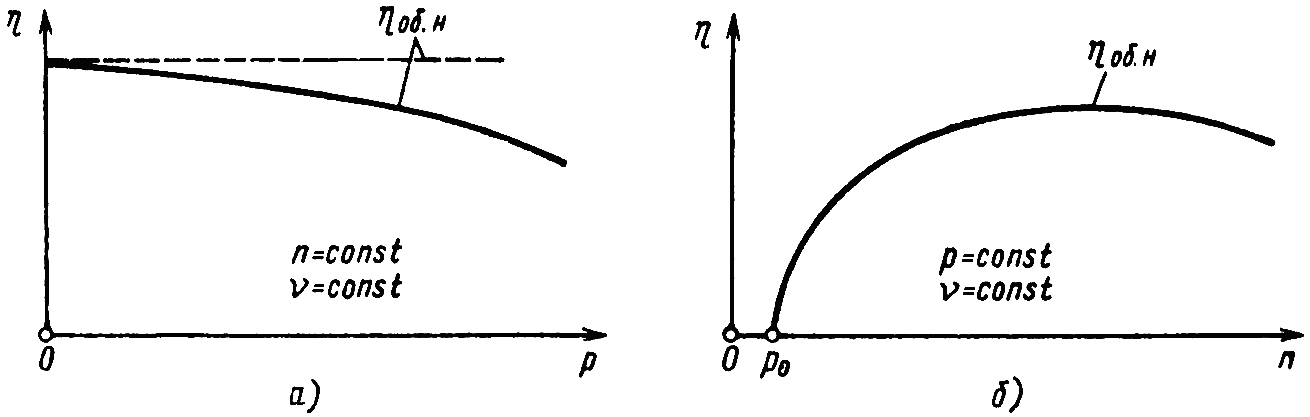
![]() без учета условных утечек от перепада
давления (допускаем, что зазоры с
изменением давления не меняются) при
постоянной скорости (рис. 8., а)
и при изменяемой скорости (частоты
вращения n)
при постоянном давлении (рис. 8., б).
Штриховая линия на рис. 8., а
соответствует идеальному насосу с
нулевыми утечками (
без учета условных утечек от перепада
давления (допускаем, что зазоры с
изменением давления не меняются) при
постоянной скорости (рис. 8., а)
и при изменяемой скорости (частоты
вращения n)
при постоянном давлении (рис. 8., б).
Штриховая линия на рис. 8., а
соответствует идеальному насосу с
нулевыми утечками (![]() ).
).
Изменение объемного КПД насоса практически находится в прямой зависимости от перепада давления (рис. 8., а). Т.к. теоретическая подача насоса Qт (рис. 7., а) при отсутствии объемных потерь на всасывании прямо пропорциональна частоте его вращения n, а абсолютная величина утечек жидкости ΔQ1 (рис. 7., б) при этом зависит лишь от перепада давления жидкости и практически не зависит от n, объемный КПД насоса с увеличением n в пределах данного режима работы, повышается (рис. 8., б).
Однако подобное повышение подачи насоса при увеличении n будет происходить лишь до определенных значений n, при которых утечки ΔQ2 отсутствуют. При некоторой высокой частоте вращения n2 начнет сказываться влияние потерь на всасывании и т.к. с увеличением частоты вращения эти утечки возрастают, то линейность зависимости подачи Qэф от n будет нарушена (рис. 7., а), что вызовет стабилизацию и при некотором увеличении n – снижение объемного КПД (рис. 8., б).
Вопрос №6 Механические потери в гидромашинах, механические характеристики насосов, механический КПД насоса.
Преобразование энергии в гидромашине
обеспечивается движением вытеснителей,
которое сопровождается потерями энергии
на трение механических частей. Механические
потери в насосе ΔNн
и моторе ΔNм
определяются как разность между
теоретической мощностью и фактической
мощностью на валу машины: ![]() и
и
![]() ,
,
где Nпр – приводная мощность от электродвигателя; Nт - мощность, соответствующая фактическому подводимому расходу Q при данном давлении; Nэф - мощность, соответствующая фактическому крутящему моменту на валу гидромотора при данной частоте вращения.
С ледовательно,
механические потери увеличивают мощность
и крутящий момент на валу насоса и
уменьшают их на валу гидромотора (рис.
4). Фактический крутящий момент на валу
насоса Мпр или гидромотора
Мэф равен сумме крутящих
моментов:
ледовательно,
механические потери увеличивают мощность
и крутящий момент на валу насоса и
уменьшают их на валу гидромотора (рис.
4). Фактический крутящий момент на валу
насоса Мпр или гидромотора
Мэф равен сумме крутящих
моментов:
– для насоса
![]() ;
;
– для гидромотора
![]() ,
,
г
Рис. 4. Зависимость крутящего
момента от перепада давления![]() и
и
![]() –
теоретический крутящий момент насоса
и мотора, – это момент, развиваемый
перепадом Δр давления жидкости в
камерах насоса или мотора без учета
потерь на механическое трение и потерь
сопротивления жидкости:
–
теоретический крутящий момент насоса
и мотора, – это момент, развиваемый
перепадом Δр давления жидкости в
камерах насоса или мотора без учета
потерь на механическое трение и потерь
сопротивления жидкости: ![]() и
и
![]() ;
;
где qн и qм – рабочие объемы насоса и гидромотора.
Отрезок Δр0 характеризует потери на страгивание ненагруженного гидромотора.
Механические потери характеризуются механическим КПД машины равным отношению теоретической мощности к мощности, подведенной к машине извне. Механический КПД насоса равен
![]() или
или
![]() , где
Мт и Мпр –
теоретический крутящий момент на валу
насоса и приводной момент, приложенный
к его валу.
, где
Мт и Мпр –
теоретический крутящий момент на валу
насоса и приводной момент, приложенный
к его валу.
Крутящий теоретический момент Мт
определяется по формуле
![]() .
.
Следовательно механический КПД насоса
определится по формуле
![]() .
.
К
Рис. 5.
![]() от выходного давления p
(рис. 5), при повышении давления до
некоторого значения р1
механический КПД увеличивается
практически пропорционально повышению
давления. Это обусловлено тем, что
увеличение механических потерь мощности
ΔNн, наблюдающееся
с повышением давления жидкости (рис.
4), пропорционально увеличению теоретической
мощности Nт. При
давлениях от р1 до р2
механический КПД практически
стабилизируется, а при дальнейшем
повышении давления снижается. Т.к.
интенсивно увеличиваются механические
потери ΔNн, и
приводная мощность Nпр
с увеличением давления повышается более
интенсивно, чем теоретическая мощность
Nт.
от выходного давления p
(рис. 5), при повышении давления до
некоторого значения р1
механический КПД увеличивается
практически пропорционально повышению
давления. Это обусловлено тем, что
увеличение механических потерь мощности
ΔNн, наблюдающееся
с повышением давления жидкости (рис.
4), пропорционально увеличению теоретической
мощности Nт. При
давлениях от р1 до р2
механический КПД практически
стабилизируется, а при дальнейшем
повышении давления снижается. Т.к.
интенсивно увеличиваются механические
потери ΔNн, и
приводная мощность Nпр
с увеличением давления повышается более
интенсивно, чем теоретическая мощность
Nт.
Вопрос №7 Роторные радиально-поршневые гидромашины. Основные термины и определения. Кинематическая и принципиальная схема радиально-поршневого многопоршневого насоса. Устройство и принцип действия.
Различают поршневой и плунжерный насосы, которые являются возвратно-поступательными; в первом из них рабочие органы выполнены в виде поршней, во втором – в виде плунжеров. Насосы, у которых число поршней более трех, называются многопоршневыми.
Роторная радиально-поршневая гидромашина это гидромашина (насос или гидромотор), у которой оси поршней или плунжеров перпендикулярны оси вращения ротора или составляют с ней углы более 45°.
В роторных радиально-поршневых насосах
жидкость вытесняется из рабочих камер
(цилиндров) в процессе вращательного и
возвратно-поступательного движения
вытеснителей. Кинематической основой
этого насоса является модернизированный
кривошипно-шатунный механизм, в котором
неподвижным звеном является кривошип
1 (рис. а), цилиндр 3
вращается с постоянной угловой скоростью
вокруг оси O2,
а шатун 2 вращается с переменной
скоростью вокруг оси O1.
Расстояние е между этими осями
называется эксцентриситетом. Т.к.
поршень 4 этого кривошипно-шатунного
механизма связан с шатуном 2,
вращающимся вокруг оси O1,
он будет при вращении цилиндра 3
совершать в нем возвратно-поступательные
перемещения с ходом
![]() ,
при которых камеры цилиндров будут
последовательно (через каждые 180°
поворота) увеличиваться и уменьшаться,
и будет происходить всасывание и
нагнетание жидкости.
,
при которых камеры цилиндров будут
последовательно (через каждые 180°
поворота) увеличиваться и уменьшаться,
и будет происходить всасывание и
нагнетание жидкости.