

Рабочий цикл плк
ПЛК сканирующего типа работают циклически по методу периодического опроса входных данных. Рабочий цикл ПЛК включает 4 фазы: опрос входов, выполнение пользовательской программы, установку значений выходов и некоторые вспомогательные операции (диагностика, подготовка данных для отладчика, визуализации и т.д). Прикладная программа имеет дело с одномоментной копией значений входов. Внутри одного цикла выполнения программы, значения входов можно считать константами. Такая модель упрощает анализ и программирование сложных логических и последовательностных алгоритмов. Очевидно, что время реакции на событие будет зависеть от времени выполнения одной итерации прикладной программы.
В технических характеристиках ПЛК приводится типовое время рабочего цикла. Сегодня ПЛК имеют типовое значение времени рабочего цикла, измеряемое единицами миллисекунд и менее. События, требующие быстрой реакции, выделяются в отдельные задачи, приоритетность и период выполнения которых можно изменять.
Чем ПЛК отличаются от компьютеров?
Мощное вычислительное ядро современных ПЛК делает их очень похожими на компьютеры. Однако ПЛК это не «железо», а технология. Она включает специфическую аппаратную архитектуру, принцип циклической работы и специализированные языки программирования. Программирование ПЛК осуществляется людьми, хорошо знающими прикладную область, но не обязанными быть специалистами в математике.
Существуют программы имитирующие работу ПЛК на компьютере. В этом случае, удается совместить на одной машине контроллер, средства программирования и визуализации. Недостатком такого решения является значительное время восстановления при сбоях и повреждениях. Перезагрузка операционной системы (ОС) и запуск прикладной задачи может занимать несколько минут. Переустановка и настройка ОС, драйверов оборудования и прикладных программ требует значительного времени и высокой квалификации обслуживающего персонала. Системное программное обеспечение ПЛК расположено в постоянной памяти в адресном пространстве центрального процессора и всегда готово к работе. По включению питания, ПЛК готов взять на себя управление системой уже через несколько миллисекунд. В целом, в силу дешевизны, надежности и простоты применения, ПЛК доминируют на нижнем уровне систем промышленной автоматики. Они обеспечивают непосредственное управление оборудованием на переднем крае производства.
На рис. 2.71, 2.72, 2.73 представлены структурные схемы и примеры использования в пищевой промышленности простейшего контроллера МПР51-Щ4 - регулятора температуры и влажности, программируемого по времени, фирмы Овен (Россия).
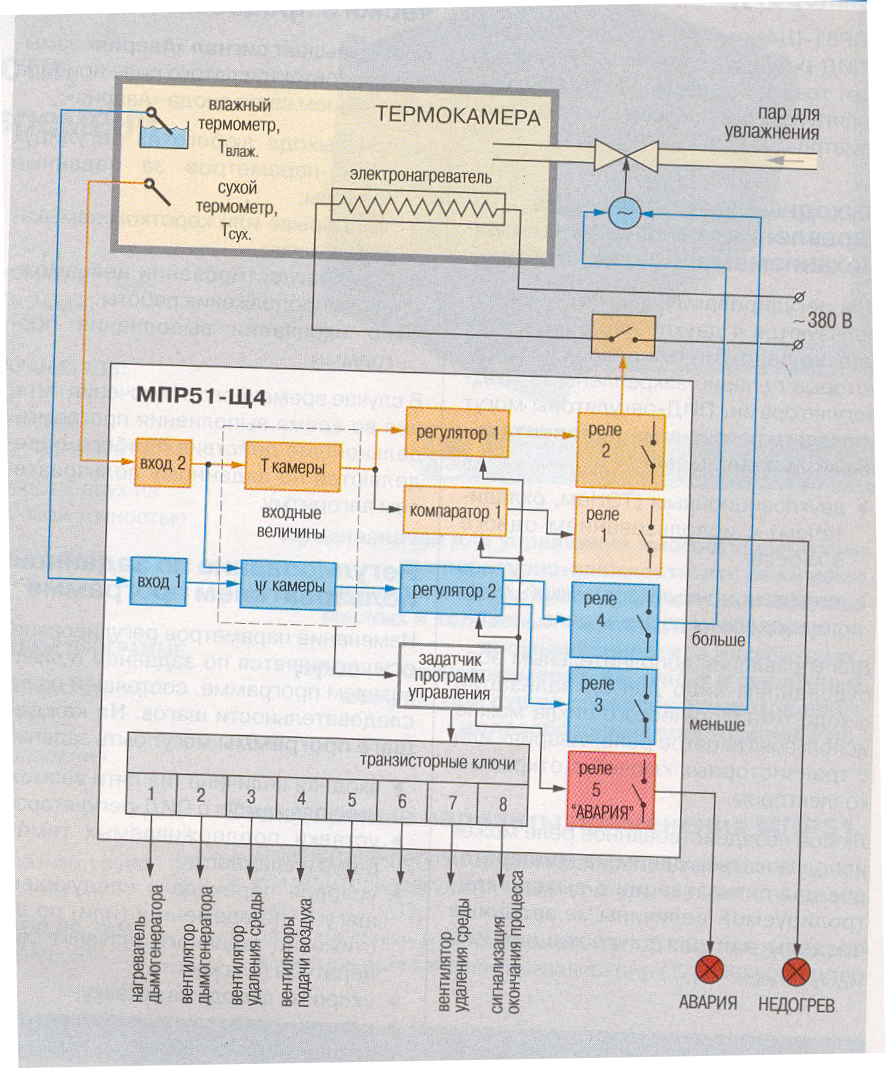
Рис. 2.71. Управление температурно-влажностным режимом при термической обработке мясопродуктов к термокамере.
При термообработке и копчении мясопродуктов в термокамере требуется не только точное поддержание определенной температуры и влажности на каждой стадии процесса, но и периодическое включение дополнительных устройств, например, дымогенератора или вентилятора. Для этого, помимо реле 2 для управления ТЭНом и двух реле (реле 3 и реле 4), обеспечивающих непрерывное поступление пара в камеру, в схеме задействованы транзисторные ключи для управления вспомогательными устройствами.
На рис. 2.72 даны примеры выполнения программы поддержания заданных параметров температуры и влажности воздуха в термокамере.
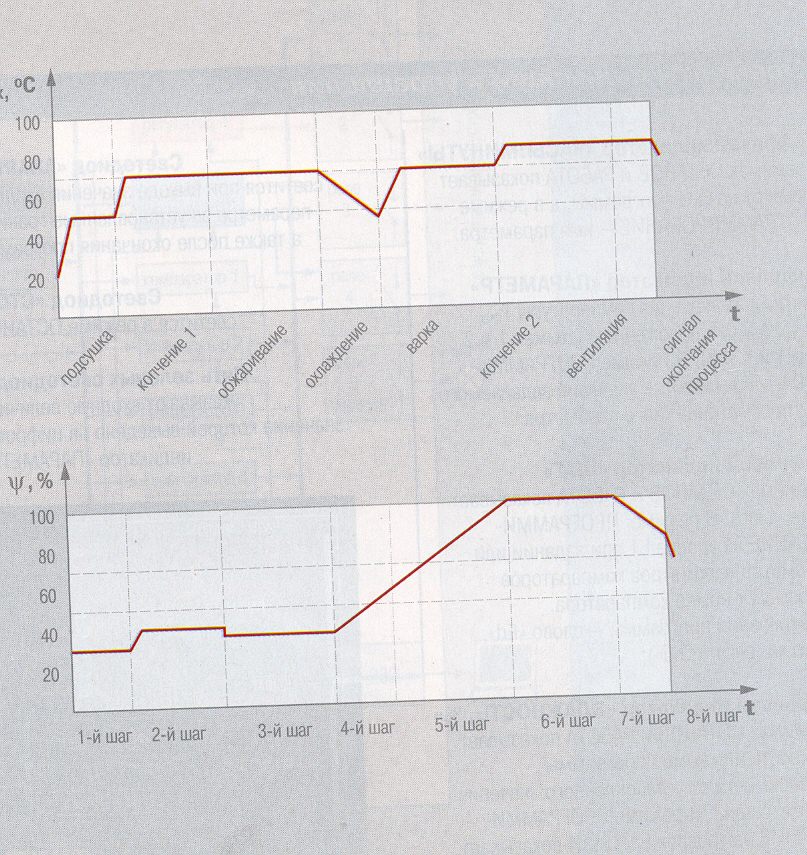
Рис. 2.72. Графики температуры и влажности заданного температурно-влажностного режима в термокамере.
На рис. 2.73 приведен пример управления температурно-влажностным режимом варочного шкафа программируемым по времени регулятором температуры и влажности ОВЕН МПР51-Щ4.
Технология изготовления некоторых вареных колбас требует соблюдения особого температурного режима, суть которого заключается в необходимости поддержания заданной разности температур ΔТ в камере (Т сух) и внутри продукта. Превышение этой величины может привести к разрыву оболочки батонов и порче продукции. Для выполнения условия ΔТ ≤ А, где ΔТ = Т сух – Т прод; А – максимально допустимая разность температур, в МПР51-Щ4 используется компаратор 1, который в случае превышения ΔТ заданного значения блокирует включение реле 2, подающего пар для нагрева камеры.

Рис. 2.73. Управление температурно-влажностным режимом варочного шкафа.
Вопросы для самопроверки.
Назначение исполнительных устройств. Принцип действия электрических исполнительных механизмов.
Единицы и размерности физических величин.
Погрешности измерений и измерительных устройств.
Типовые схемы приборов. Компенсационная схема измерений. Принципиальная схема автоматического потенциометра.
Типовые схемы приборов. Мостовая схема измерений. Принципиальная схема автоматического уравновешивающего моста.
Назначение аналого-цифровых преобразователей.
Назначение цифро-аналоговых преобразователей.
Средства измерения температуры. Принцип действия термоэлектрических преобразователей температуры. Достоинства и недостатки.
Средства измерения температуры. Принцип действия термопреобразователей сопротивления. Достоинства и недостатки.
Приборы для измерения давления. Принцип действия жидкостных приборов. Достоинства и недостатки.
Приборы для измерения давления. Принцип действия деформационных приборов. Достоинства и недостатки.
Приборы для измерения расхода вещества.
Приборы для измерения массы вещества.
Приборы для измерения уровня.
Приборы для измерения влажности воздуха.
Приборы для измерения показателей качества сырья и готовой продукции. Концентратомеры.
Приборы для измерения показателей качества сырья и готовой продукции. рН-метры.
Приборы для измерения показателей качества сырья и готовой продукции. Влагомеры.
Функциональная структура измерителя-регулятора микропроцессорного типа.
Назовите состав исполнительных устройств.
Конструктивное исполнение регулирующих органов для управления потоками жидкостей.
Что собой представляют электромагнитные исполнительные механизмы?
Что собой представляют электродвигательные исполнительные механизмы?
Назначение микропроцессорной техники в системах управления.
Назначение программируемых логических контроллеров.
Аналоговые и дискретные входы ПЛК.
Рабочий цикл ПЛК.