

Министерство образования и науки РФ
Федеральное бюджетное государственное образовательное учреждение высшего профессионального образования
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Пищевых производств
(МГУПП)
Кафедра «Автоматизация биотехнических систем»
Доц. Семина Н.А.
Системы управления
технологическими процессами и информационные технологии
Курс лекций
для студентов специальностей 260501 «Технология продуктов
общественного питания» и 260505 «Технология продуктов функционального питания»
Москва 2013
Содержание
Введение. Понятие информационных технологий………………………………………….3
1. Основы теории автоматического управления…………………………………………….5
1.1.Основные понятия и определения……………………………………………….. …….. 5
1.2.. Законы регулирования и автоматические регуляторы…………………………………11
1.2.1. Классификация автоматических регуляторов…………………………………………11
1.2.2.Системы позиционного (релейного) регулирования…………………………………..11
1.2.3.Системы регулирования непрерывного действия и законы регулирования…………12
1.2.4. Системы регулирования со средствами вычислительной техники в контуре управления………………………………………………………………………………………15
2. Технические средства автоматизации………………………………………………………17
2.1. Основные понятия об измерениях и измерительных устройствах……………………..16
2.2. Измерительные схемы приборов для измерения электрических величин……………. 22
2.3. Измерители-регуляторы микропроцессорного типа…………………………………….24
2.4. Средства измерения температуры……………………………………………………….. 26
2.5. Средства измерения давления……………………………………………………………. 37
2.6. Средства измерения расхода и количества вещества…………………………………….42
2.7. Средства измерения уровня………………………………………………………………..51
2.8.Измерениесостава и свойств веществ………………………………………………………59
2.8.1.Влагомеры…………………………………………………………………………………..59
2.8.2. Анализаторы состава жидкостей………………………………………………………...65
2.8.3. Газоанализаторы…………………………………………………………………………..70
2.9. Исполнительные механизмы и регулирующие органы…………………………………… 74
2.10. Микропроцессорные устройства в контуре управления и микроконтроллеры…………80
3. Автоматизированные системы управления технологическими процессами……………….87
3.1.Обобщенная функциональная схема АСУпредприятия……………………………………..87
3.2.Автоматизированное рабочее место (АРМ). Функции scada-системы…………………..91
3.3. Проектирование АСУТП………………………………………………………………………93
4. Рекомендуемая литература………………………………………………………………………95
Введение. Понятие информационных технологий
Информационные технологии — совокупность методов, производственных процессов и программно-технических средств, объединенных в единую технологическую цепочку, обеспечивающую сбор, хранение, обработку, вывод и распространение информации Для снижения трудоемкости процессов, использования информационного ресурса, повышения надежности и оперативности работы оборудования и т. п.
В общем случае информация — это поток знаков и символов, это сообщение, знания о каком-либо событии, о чьей-либо деятельности и т. п. На основе информации осуществляется функционирование любой управляющей системы (людей, машин, животных).
Использование информационных критериев позволяет анализировать и оценивать вероятностными методами погрешности измерений в статических и динамических режимах, качество многоканальных измерительных систем, надежность измерительных устройств, решать задачи по поиску неисправности в них, а также ряд других вопросов, связанных с восприятием, преобразованием и выдачей измерительной информации применительно к измерительному устройству или системе любого вида.
Всю сформированную информацию можно разделить на входную, выходную и промежуточную.
Входная информация представляет собой совокупность исходных данных, необходимых для решения задач управления. К ним относятся все первичные (априорные) данные, нормативно-справочная информация, а также промежуточные данные, полученные в результате решения других задач.
К выходной информации относится информация, получаемая как результат решения задач управления, предназначенная для непосредственного использования в формировании управляющего воздействия.
По способу обработки данных информация подразделяется на текстовую, алфавитную, цифровую, алфавитно-цифровую и графическую. Большое значение при машинной обработке информации имеет ее разделение по стабильности на переменную и постоянную.
Переменная информация отображает количественные и качественные характеристики производственных процессов и событий. Переменная информация для каждого фиксируемого технологического процесса может изменяться как по значениям параметров данных, так и по их количественной величине. Переменная информация, как правило, участвует в одном цикле обработки сырья, в связи с чем ее иногда называют разовой.
Постоянная информация остается неизменной в течение длительного периода времени и многократно используется в операциях.
В условиях функционирования систем управления постоянная информация должна быть записана на машинном носителе. Это позволит создавать постоянно действующие массивы (банк) данных, участвующие в решении многих задач управления.
При обработке на компьютерах нормативно-справочной информации необходимо, чтобы в различных формах документов повторяемость одних и тех же данных была минимальной, зафиксированные данные были удобно расположены для последующей машинной обработки; кроме данных для машинной обработки содержалась дополнительная информация, необходимая для осуществления управления технологическим процессом.
Любая система управления, в том числе и автоматизированная, не может работать без информации о состоянии управляемого объекта (процесса) и внешней среды, без передачи информации о сформированных управляющих воздействиях. Определение оптимальных объемов информации, поступающей в различные устройства управления и распределения потоков информации во времени и пространстве, — необходимое условие эффективного функционирования АСУ.
Непрерывное и своевременное обеспечение системы управления всеми необходимыми сведениями — основная функция информационного обеспечения автоматизированных систем управления (АСУ).
Информационное обеспечение АСУ — совокупность единой системы классификации и кодирования технико-экономической информации, унифицированных систем документации и массивов информации, используемых в автоматизированных системах управления (ГОСТ 19675-74).
Иными словами, информационное обеспечение АСУ представляет собой совокупность данных, языковых средств их описания, методов организации, хранения, накопления и доступа к информационным массивам, обеспечивающих выдачу всей информации, необходимой в процессе реализации функциональных задач АСУ, и справочной информации абонентам системы.
Сформированные данные систематизируют в специальные массивы — информационную базу (базу данных) системы.
Основное назначение информационного обеспечения систем управления — создание динамической информационной модели объекта, отражающей его состояние в текущий или предшествующий моменты времени.
1. Основы теории автоматического управления
1.1. Основные понятия и определения
Управление техническим (технологическим) объектом обычно состоит в выработке команд, реализация которых обеспечивает целенаправленное изменение состояния объекта при соблюдении заданных требований и ограничений.
В зависимости от уровня автоматизации производства под объектом управления (ОБ) понимают отдельный аппарат, машину, агрегат, технологический участок, технологическую линию или цех.
Состояние объекта в отношении цели управления определяется текущими значениями некоторого числа контролируемых переменных, получивших название управляемых величин объекта.
Воздействия, получаемые объектом со стороны внешней среды и приводящие к нежелательным отклонениям управляемых величин, называют возмущающими воздействиями или возмущениями.
Изменение управляемых величин в соответствии с целью управления, например, поддержание их на неизменном уровне, осуществляется подачей на объект специально организованных управляющих воздействий.
Управление, осуществляемое без участия человека, называют автоматическим, а техническое устройство, выполняющее в этом случае функции управления, - автоматическим управляющим устройством или контроллером (регулятором). Объект управления и контроллер во взаимодействии друг с другом образуют систему автоматического управления.
В процессе работы контроллер получает текущую информацию о цели управления, о текущем состоянии объекта управления и среды его функционирования. В соответствии с полученной информацией контроллер формирует управляющие воздействия на объект таким образом, чтобы была достигнута цель управления.
Схематичное изображение отдельных элементов системы (обычно в виде прямоугольников) и воздействий в виде векторов, действующих на систему из внешней среды, называют структурной схемой системы автоматического управления. В отношении выполняемых элементами системы функций всякая система управления состоит, как минимум, из двух основных элементов: управляемого объекта, в котором протекает технический (технологический) процесс, и контроллера, осуществляющего функции управления этим процессом (рисунок 1.1а). Система, имеющая такую структуру, может быть работоспособной только при выполнении следующих условий: на объект управления не действуют никакие возмущения, математическая модель объекта известна для любого момента времени, требуемый алгоритм управления контроллера может быть реализован с необходимой точностью. Нарушение хотя бы одного из указанных условий приводит к отклонению управляемой величины от желаемого значения. Чтобы этого не происходило, вводят добавочный информационный канал, по которому контроллер получает информацию о действительном значении управляемой величины – обратную связь. Это позволяет при появлении отклонения управляемой величины от желаемого значения контроллеру осуществить дополнительное изменение управляющего воздействия на объект, чтобы ликвидировать появившееся отклонение (рисунок 1б).

Рис. 1.1 – Схемы простейших систем управления: а – прямое управление; б – управление с обратной связью (по отклонению), здесь:
х – задающее воздействие, хр – управляющее воздействие регулирующего органа, у - управляемая величина, λ – возмущения; КН – контроллер, ОБ – объект управления.
Канал, по которому информация с выхода системы о значении управляемой величины передаётся на вход контроллера, называют каналом обратной связи. В системе с обратной связью есть замкнутый контур, поэтому такие системы называют замкнутыми системами управления (рис.1.1 б). Соответственно систему управления без обратной связи называют разомкнутой системой управления(рис. 1.1 а).
В зависимости от характера сигнала задания (задающего воздействия) системы управления принято разделять на три вида:
1. Стабилизации, если задающее воздействие не изменяется во времени.
2. Программного управления, если задающее воздействие является заранее известной (детерминированной) функцией времени.
3. Зависимого управления, или следящей, если задающее воздействие является неопределённой в будущем функцией времени.
Управление называется непрерывным, если осуществляемое контроллером изменение управляющего воздействия происходит в непрерывной зависимости от изменения задающего воздействия и управляемой величины. В случае дискретного управления управляющее воздействие принимает лишь какое-нибудь одно из нескольких возможных значений (в пределе – только из двух значений) либо формируется контроллером в дискретные моменты времени.
Дискретное управление применяется тогда, когда алгоритм управления имеет характер логических условий; в этом случае управление называют логическим. Логическое управление чаще всего применяется в режимах пуска или остановки технического объекта, когда необходимо в определённой последовательности вводить в действие отдельные двигатели, механизмы, устройства. В практике при управлении сложными техническими (технологическими) объектами непрерывное и дискретное управления применяют совместно.
Как правило, из общей задачи управления выделяют задачу устранения влияния на достижение цели управления действующих на объект неконтролируемых возмущений, а также погрешности, возникшей при реализации в техническом устройстве алгоритма управления. Эта задача решается в структуре замкнутой части системы управления, которая называется подсистемой автоматического регулирования. В результате разделения функций системы управления контроллер представляет собой два соподчинённых блока:
- регулирующий блок, осуществляющий функции регулирования; его обычно называют автоматическим регулятором или просто регулятором;
- командный блок, вырабатывающий командное воздействие на регулятор таким образом, чтобы была достигнута цель управления.
Рассмотренная система управления (рис. 1.2) может считаться двухуровневой: первый (нижний) уровень образует подсистема регулирования; второй – командный блок, а в качестве объекта выступает подсистема регулирования. Такого рода двухуровневые (многоуровневые) структуры систем управления получили название иерархических структур систем управления.

Рис.1.2 – Схема двухуровневой системы управления: КБ – командный блок, Р – регулятор, ОБ – объект регулирования, х – задание, u – управляющее воздействие, y – управляемая величина, хр – регулирующее воздействие, εр – сигнал рассогласования, λ – возмущения.
Сигнал рассогласования является функцией времени: εр (t)= x(t) - y(t).
В предыдущих схемах систем управления неполнота информации о состоянии объекта обусловлена тем, что регулятор контролирует лишь отклонение регулируемой величины, как конечный результат действия различных возмущений на объект регулирования. Схема системы управления, в которой регулятор получает добавочную информацию об изменении возмущения λк(t), приведена на рис.1.3:

Рис. 1.3. – Схема системы автоматического регулирования с компенсацией возмущения или комбинированная.
Здесь обозначено КВ – блок компенсации возмущения, λк – компенсируемое возмущение. Такие системы получили название систем регулирования с компенсацией возмущений или комбинированные.
Системы с несколькими замкнутыми контурами называют многоконтурными. В практике автоматизации в ряде случаев приемлемое качество регулирования достигается и при отсутствии командного блока, т.е. x(t) = u(t). Системы с одним замкнутым контуром называют одноконтурными.
Объектом регулирования называется технологический аппарат, агрегат или машина, в которой осуществляется процесс регулирования одного или нескольких физических параметров. Регулируемой величиной или регулируемым параметром называется физическая величина (температура, давление, расход, уровень и т.д.), значение которой должно поддерживаться постоянным или изменяться по программе. Регулирующим воздействием называется воздействие на объект регулирования со стороны регулятора.
Объекты регулирования характеризуются тем, что через них непрерывно протекает вещество или энергия. Количества вещества или энергии, протекающей через объект или отбираемой от объекта, называется нагрузкой. Изменение нагрузки приводит к изменению регулируемого параметра; чтобы поддержать регулируемый параметр на заданном уровне, необходимо изменить приток вещества или энергии в объект в соответствии с новым значением нагрузки объекта.
Емкостью объекта регулирования называется количество содержащегося в нем в рассматриваемый момент времени вещества или энергии.
Наиболее неблагоприятные условия для
регулирования имеют место при мгновенном
(скачкообразном) нарушении баланса
между приходом и расходом вещества или
энергии в объекте регулирования. Кривая,
которая показывает, как изменяется
регулируемый параметр
![]() во времени t при скачкообразном
возмущении (изменении
во времени t при скачкообразном
возмущении (изменении
![]() )
и отключенном регуляторе, называется
переходной характеристикой или
кривой разгона объекта (рис. 1.4).
)
и отключенном регуляторе, называется
переходной характеристикой или
кривой разгона объекта (рис. 1.4).


Рис. 1.4. Переходная характеристика одноемкостного объекта с
самовыравниванием
В некоторых объектах при нарушении равенства притока и расхода вещества или энергии регулируемый параметр принимает новое, постоянное значение без вмешательства извне. Такие объекты обладают свойством самовыравнивания, их называют статическими. У объектов, не обладающих свойствами самовыравнивания, любое изменение регулируемого параметра не оказывает обратного воздействия на приток или расход вещества (энергии), в результате чего параметр будет изменяться непрерывно, такие объекты называются астатическими.
Переходная характеристика одноемкостного объекта с самовыравниванием является решением дифференциального уравнения:
![]()
где: Т – постоянная времени;
- значение выходной величины объекта регулирования;
![]() - значение входной величины объекта
регулирования;
- значение входной величины объекта
регулирования;
k –коэффициент передачи.
В соответствии с вышеизложенным, при
![]()
![]() в приведенном уравнении приобретает
смысл переходной характеристики и
решение уравнения при
в приведенном уравнении приобретает
смысл переходной характеристики и
решение уравнения при ![]() =0
имеет вид:
=0
имеет вид:
![]()
Переходная характеристика, представленная на рис. 4(б).может быть аппроксимирована уравнением передаточной функции
![]() ,
,
где: Т – постоянная времени;
p – оператор связи между функциями входных и выходных сигналов;
- значение выходной величины объекта регулирования;
- значение входной величины объекта регулирования;
k – коэффициент усиления (передачи).
Переходная характеристика для одноемкостных объектов (рис.4) представляется собой экспоненту. Экспонента обладает свойством, при котором касательные, проведенные из любой ее точки, отсекают на линии, соответствующей новому установившемуся значению регулируемого параметра, одинаковые отрезки. Эти отрезки времени T называются постоянной времени объекта регулирования. Физическое значение постоянной времени T таково: это время, в течение которого регулируемый параметр, изменяясь в процессе самовыравнивания с постоянной скоростью, изменился бы от текущего значения до установившегося (потенциального).
Другой величиной, характеризующей
объект регулирования, является коэффициент
![]() .
Коэффициент усиления k
показывает во сколько раз изменение
регулируемого параметра (выходной
величины) будет больше изменения входной
величины – регулирующего воздействия
при переходе от одного установившегося
значения регулируемого параметра к
другому.
.
Коэффициент усиления k
показывает во сколько раз изменение
регулируемого параметра (выходной
величины) будет больше изменения входной
величины – регулирующего воздействия
при переходе от одного установившегося
значения регулируемого параметра к
другому.
В системах автоматического регулирования изменение регулируемого параметра начинается не сразу, а через определенный промежуток времени после начала возмущающего воздействия. Требуется определенный промежуток времени до начала перемещения регулирующего органа. Начало перемещения регулирующего органа также не приводит к мгновенному изменению регулируемого параметра. Это явление называется запаздыванием. Различаются два вида запаздывания: чистое запаздывание и емкостное.
Чистое запаздывание
![]() (передаточное, транспортное и дистанционное)
– это время, в течение которого
регулируемый параметр после начала
действия возмущения не изменяется
(рис.1.5 б).
(передаточное, транспортное и дистанционное)
– это время, в течение которого
регулируемый параметр после начала
действия возмущения не изменяется
(рис.1.5 б).
Переходное (емкостное) запаздывание
![]() имеет место в многоемкостных объектах,
когда несколько емкостей соединены
между собой последовательно через
различные сопротивления (тепловые,
гидравлические и т.п.), что вызывает
замедление перехода энергии или вещества
из одной емкости в другую.
имеет место в многоемкостных объектах,
когда несколько емкостей соединены
между собой последовательно через
различные сопротивления (тепловые,
гидравлические и т.п.), что вызывает
замедление перехода энергии или вещества
из одной емкости в другую.
Обычно при определении переходных характеристик объектов регулирования оперируют величиной полного запаздывания
![]() ,
,
где
![]() - время чистого запаздывания;
- время чистого запаздывания;
- время переходного запаздывания.

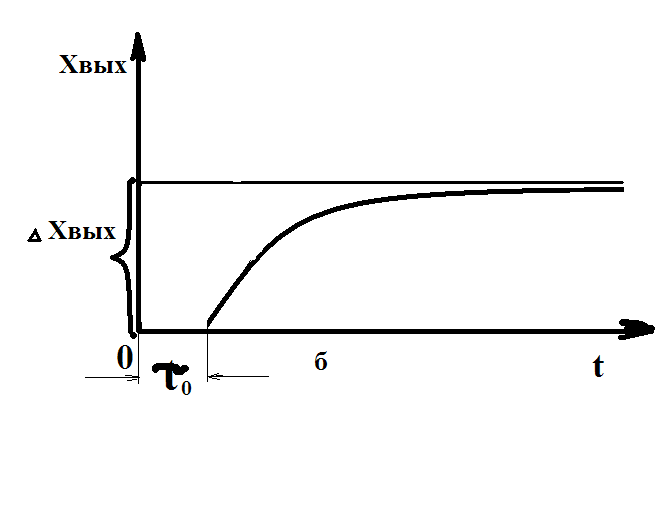
Рис. 1.5. Переходная характеристика статического объекта с запаздыванием
Пример статического объекта с самовыравниванием.
В установившемся режиме, при определенной подаче топлива, давление пара в барабане котла Ро (yo). При увеличении топлива оно увеличилось и стало равным Р1 (yo), т.е. снова достигнут установившийся режим, но на другом уровне. Это новое положение равновесия может быть достигнуто без регулятора (рис. 1.6).

Рис.1.6. Кривая разгона статического объекта. Объект регулирования барабан котла. Y – регулируемая величина, давление пара в барабане котла P, τтр – транспортное запаздывание, τемк – емкостное запаздывание, Т0 – постоянная времени разгона, Тр- время разгона объекта регулирования.
Примером объекта без самовыравнивания может служить уровень воды в барабане котла (рис. 1.7). При резком увеличении подачи питательной воды в барабан котла ее уровень (Н) в барабане возрастает. Расход пара из котла останется прежним, а приток воды продолжается, поэтому уровень Н растет.

Рис. 1.7. Кривая разгона астатического объекта. Объект регулирования – барабан котла. Y – регулируемая величина, уровень воды в барабане котла Н, τтр – транспортное запаздывание, τемк – емкостное запаздывание, Т0 – постоянная времени разгона, Тр- время разгона объекта регулирования.
Для астатического объекта устойчивое функционирование системы без регулятора невозможно.