

1.7.2 Функції цифрового керування
Цифрове керування звичайно складається із таких операцій:
1) визначення керуючих впливів шляхом обчислення на ЦОМ керування процесом;
2) перевірка виконання умов безпеки для реалізацій цих впливів та заборони впливів на процес при невиконанні цих умов;
3) включення керуючих впливів;
4) видача повідомлень про вироблені впливи та про їх закінчення.
Найважливішою операцією є перевірка виконання умови безпеки.
Для цього необхідно щоб:
1) всі необхідні попередні дії було виконано;
2) ключові змінні стану знаходились у встановлених межах;
3) зміна значень змінних керування не повинна перевищувати визначеного проценту цієї величини;
4) рішення оператора було виконане.
До типових режимів роботи відносяться пуск, зупинення обладнання та зміна навантаження. При цьому людина-оператор може розглядатися як основна частина комплексу обладнання із своїм коефіцієнтом передачі, постійною часу та чистим запізнюванням
1.7.3 Безпосереднє цифрове керування
Безпосереднє цифрове управління - це функція керуввання, яка забезпечує керування змінними процесу таким чином, щоб вони відповідали сигналам еталонних значень, які видаються у вигляді певної послідовності процедур та керуючих впливів. При цьому ЕОМ керування процесом замінює собою звичайні аналогові автоматичні пристрої, за допомогою яких реалізується закон керування процесом (Рис. 50)
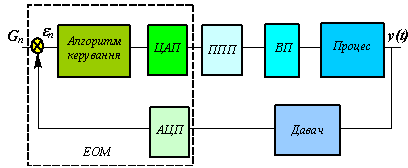
Рис. 50 Безпосереднє цифрове керування
Безпосереднє цифрове керування складається із таких операцій:
1)виробка
вихідних даних вимірювальної величини
![]() за
допомогою давача та аналого-цифрове
перетворення її у код
за
допомогою давача та аналого-цифрове
перетворення її у код
![]() ;
;
2)згладжування та фільтрація даних ;
3)зрівняння
величини
з еталонним заданим значенням
![]() для одержання сигналу розузгодження
для одержання сигналу розузгодження
![]() (сигналу похибки);
(сигналу похибки);
4)перетворення сигналу похибки за допомогою алгоритму управління для одержання вихідного сигналу;
5)приведення в дію відповідних запобіжних пристроїв та виконання мір безпеки перед операцією видачі вихідного сигналу;
6)запуск
цифро-аналогового перетворювача для
видачі сигналу управління
,
який підсилюючи-перетворюючим пристроєм
ППП перетворюється у відповідний
управляючий вплив
![]() ,
який поступає на виконавчий пристрій
ВП.
,
який поступає на виконавчий пристрій
ВП.
1.8 Перетворення та обробка сигналів
Спеціалісти, які застосовують та проектують системи керування, застосовують ЦОМ як правило у двох основних випадках. У першому випадку ЦОМ використовується для моделювання та розрахунку систем керування: виконується аналіз та синтез систем керування, аналізуються результати аналітичних розрахунків, аналізуються результати експериментальних досліджень. До другого випадку слід віднести використання ЦОМ у якості контролерів та мікропроцесорів як пристроїв керування, в які закладаються складні алгоритми обробки та перетворення як аналогових так і цифрових сигналів. які діють у сучасних системах керування. Так на систему керування діють як неперервні так і дискретні сигнали , які є незалежними по відношенню до самої системи керування, тобто сигнали задаючих пристроїв та сигнали різноманітних збуджень, які можуть бути як контрольованими так і неконтрольованими. Вихідні сигнали , а також сигнали , що несуть інформацію про внутрішний стан системи керування, тобто змінні стану, як правило є неперервними (аналоговими) сигналами і для їх застосування у відповідності з заданою ціллю керування повинні підлягати відповідної обробки та аналогово-цифровому перетворюванню ( АЦП) . Аналогово-цифрове перетворення може бути описано як операція кодування. Одночасно вихідні сигнали контролерів та мікропроцесорів, як дискретні (цифрові) сигнали, для подальшого їх використання подаються в систему керування за допомогою цифро-аналогового перетворення (ЦАП). Таким чином ЦОМ як правило працює у режимі розділення часу (переривання), що викликає необхідність у спеціальних пристроях, мультиплексорах, квантуючих пристроях, фіксаторах, тощо. Отже, для їх використання необхідно мати відповідний математичний опис.