

1.2.2 Принцип замкнутого керування.
Чи
можна використати інформацію про
відхилення величини керування
![]() від потрібного значення
від потрібного значення
![]() ,
незалежно від причин, які спричинили
таке відхилення, та побудувати систему
керування, яка підтримувала б вихідну
величину на потрібному значенні?
,
незалежно від причин, які спричинили
таке відхилення, та побудувати систему
керування, яка підтримувала б вихідну
величину на потрібному значенні?
Поміркуємо!
Нехай значення вихідної величини
![]() визначається відношенням
визначається відношенням
![]() де
де
![]() –
ідеальний оператор перетворення системи.
–
ідеальний оператор перетворення системи.
У
результатi дiї збудження
![]() дiйсне значення
буде вiдрiзнятися вiд
дiйсне значення
буде вiдрiзнятися вiд
![]() на величину
на величину
![]()
![]()
Але
така постановка задачi потребує
органiзацiї системи збору iнформацiї про
характер змiни керованої величини, тобто
необхiдний контроль результату дiї
зовнiшнiх впливiв та порiвняння його з
потрiбним значенням та виробки додаткового
управляючого впливу
![]() .
.
Нехай
у найпростому випадку
![]() ,
тобто
,
тобто
![]() .
.
Тоді
![]() ,
тобто вiдхилення дорiвнює результату
порiвняння завдання
,
тобто вiдхилення дорiвнює результату
порiвняння завдання
![]() та виходу
,
для чого у системi створюється канал
від’ємного зворотного зв'язку. При
цьому вiдбувається замикання системи,
при якому iнформацiя про результат дiї
подається до входу системи на датчик
розузгодження (Рис.21).
Оператор зворотного зв'язку
та виходу
,
для чого у системi створюється канал
від’ємного зворотного зв'язку. При
цьому вiдбувається замикання системи,
при якому iнформацiя про результат дiї
подається до входу системи на датчик
розузгодження (Рис.21).
Оператор зворотного зв'язку
![]() служить
для перетворення вихiдної величини
до вигляду, здатного для порiвняння із
задаючим впливом
.
служить
для перетворення вихiдної величини
до вигляду, здатного для порiвняння із
задаючим впливом
.
Таким чином, система рівнянь та співвідношень у такій системі приймає наступний вигляд :
Рис. 21 Схема системи із замкнутим принципом керування
Розв'язавши систему рівнянь відносно задаючих та збуджуючих впливів отримуємо
![]() .
(6)
.
(6)
Для порівняння результату дії замкненої системи з розімкнутою покладемо
![]()
Тоді
![]() , де коефіцієнт
, де коефіцієнт
![]() визначає статизм характеристики
навантаження, який показує у кілька
разів замкнутий принцип керування
точніше розімкнутого (Рис.22).
Очевидно, що при
визначає статизм характеристики
навантаження, який показує у кілька
разів замкнутий принцип керування
точніше розімкнутого (Рис.22).
Очевидно, що при
![]() дія збуджуючого впливу зводиться до
нуля
дія збуджуючого впливу зводиться до
нуля

Рис.22 Порівняльні характеристики навантаження в системах розімкнутого та замкнутого принципів керування
При
цьому закон керування буде визначатися
як
![]() ,
а типова система керування з ДПС
приймає вигляд (Рис.23)
,
а типова система керування з ДПС
приймає вигляд (Рис.23)
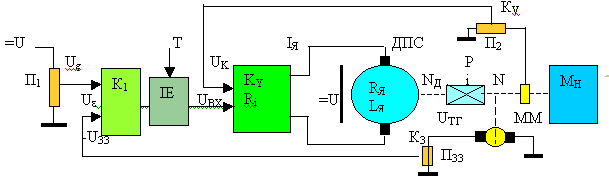
Рис. 23 Типова система керування ДПС із законом керування по відхиленню
Таким чином у замкненій системі реалізується Закон керування за похибкою регульованої величини від заданого впливу, тобто замкнений закон керування.
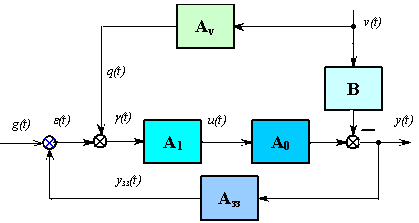
Рис.24 Схема замкнутого керування з комбінованим законом керування
Якщо неможливо побудувати систему керування із пристроєм, який має нескінченно великий коефіцієнт підсилення, але є можливість контролювати збудження, то можливо реалізувати комбінований закон керування за відхиленням та збуджуючим впливом
![]() (7)
(7)
Функціональні співвідношення окремих елементів приймають вигляд
які дають змогу здобути основне рівняння виходу
![]() (8),
яке показує, що для
повної компенсації впливу збудження
потрібно додати канал компенсації з
перетворюючими властивостями, які
визначаються співвідношенням
(8),
яке показує, що для
повної компенсації впливу збудження
потрібно додати канал компенсації з
перетворюючими властивостями, які
визначаються співвідношенням
![]() (9)
При
цьому замкнена система керування набуває
позитивних властивостей розімкненої.
(9)
При
цьому замкнена система керування набуває
позитивних властивостей розімкненої.
Зверніть
увагу!
Сумарний вплив каналів передачі
збуджуючого впливу повинен дорівнювати
нулю
![]() ,
тобто
канал компенсації завжди діє з протилежним
знаком порівняно із знаком дії каналу
передачі збуджування у об'єкті керування.
,
тобто
канал компенсації завжди діє з протилежним
знаком порівняно із знаком дії каналу
передачі збуджування у об'єкті керування.
Висновки :
1. Системи, побудовані за розімкненим принципом керування, мають підвищену швидкість відпрацювання збуджуючого впливу.
2. Системи з принципом керування по відхиленню мають більшу точність відпрацювання збуджуючих впливів без контролю самих діючих на систему збуджень.
3. В системах комбінованого керування за рахунок вибору оптимального значення оператора каналу компенсації можливо зробити систему інваріантною по відношенню до збуджуючого впливу.