

2.7.1 Дослiдження швидкодiї та коливальностi дискретних систем управлiння
Швидкодiя та коливальність дискретних САУ залежить вiд швидкостi згасання та коливальностi вiльних складових yві перехiдних послідовностей, якi в свою чергу залежать вiд характеристик вагової послідовності.
Представимо)![]() таким чином
таким чином

де
![]() та Si
коренi характеристичного рiвняння
дискретної системи у площинах змiнних
Z
та S вiдповiдно, а h0>0
є деякою дiйсною сталою, яка визначається
як
та Si
коренi характеристичного рiвняння
дискретної системи у площинах змiнних
Z
та S вiдповiдно, а h0>0
є деякою дiйсною сталою, яка визначається
як
![]() (126)
(126)
тобто є степенем стiйкостi.
Очевидно, що степiнь стiйкостi h0 може бути знайдено за умови находження системи на межi стiйкостi по зміщеної iмпульсної передаточної функцiї W*(jw,h0), тобто
![]()
Але у площинi Z пряма h0 площини S буде вiдображатися як коло радiусу h0*, де h0*=1-h*, тобто у якостi мiри швидкодiї може використатися вiдстань h0* вiд найближчого полюсу zi до кола радiусу R=1. Якщо всi коренi zi нульовi, то перехiдний процес буде скiнчуватися за кiнцеве число тактiв.
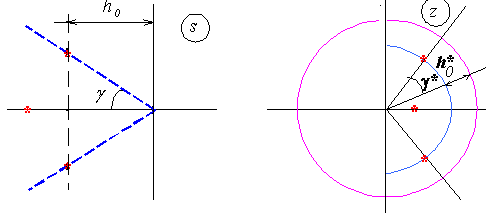
Рис. 108 Степінь стійкості у S та Z площинах
Дiйсно, у випадку, якщо W(z) має вигляд
![]() (127)
(127)
розклад
у ряд Лорана по степеням
![]()
![]()
що дає вагову послiдовнiсть, яка має кiнцеве значення вагових коефiцiєнтiв

а це позначає, що вiльна складова перехiдного процесу закiнчується за n тактiв.
Степiнь стiйкостi для подiбних систем дорiвнює нескiнченностi, тому що
![]()
тобто нульовому коренi у Z площинi вiдповiдає нескiнченно вiддалений корінь у S площинi.
Коливальнiсть
дискретних САУ, як свiдчить вираз
![]()
залежить вiд того, чи є корінь , який віддалено вiд дiйсної пiвосi площини Z.
Як i для неперервних систем, оцiнка степенi коливальностi може бути визначена по вiдношенню
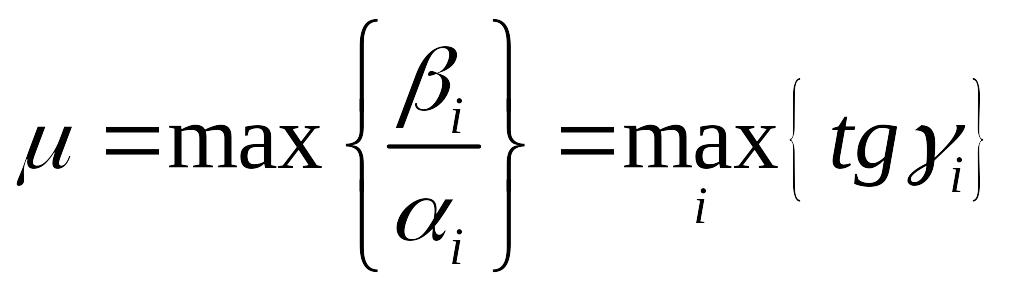 (128)
(128)
Очевидно,
що максимальне перерегулювання у
системi залежить вiд
![]() та при однiй парi комплексних коренiв
має вигляд
та при однiй парi комплексних коренiв
має вигляд
![]()
де С залежить вiд початкових умов.
П 2.34
Дослідити умови стійкості та вплив структури системи керування на стійкість
Дискретна система 1-го порядку
Передаточна
функція неперервної частини
![]() .
Імпульсний елемент - ФНП
.
Імпульсний елемент - ФНП
Період
квантування
![]() ,
,
![]() ,
,
![]() .
Вхідний вплив
.
Вхідний вплив
![]() ,
,
![]()
Передаточна
функція неперервної частини
![]()
Порядок розрахунку
Визначення передаточної функції розімкнутої системи у формі
1.
Передаточна функція ФНП
![]()
Визначається часова характеристика
2.
![]()
3.
![]()
4.
![]()
Визначається передаточна функція замкнутої системи
5.
![]()
Визначається характеристичне рівняння та його корені
6.
![]()
7.
![]()
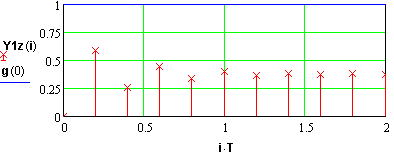
8. Будується перехідний процес
![]()
Перевіряється стійкість по критерію Михайлова
![]()
Система стійка
П 2.35
Дискретна система 2-го порядку (астатична)
Розрахунок
виконується за попередньою схемою
![]()
Передаточна
функція неперервної частини
![]()
,
![]()
![]()
![]()
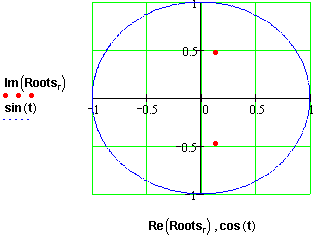
Рис.109 Розташування коренів для системи 2-го порядку
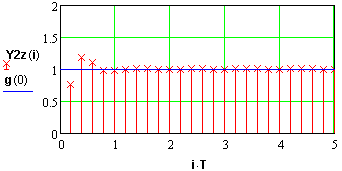
Рис 110 Перехідна характеристика замкнутої системи. Система стійка
П 2.36
Дискретна система 3-го порядку (Астатизм 2-го порядку)
Передаточна
функція неперервної частини
![]()
![]()
![]()
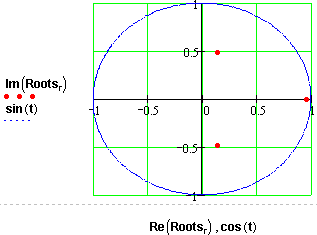
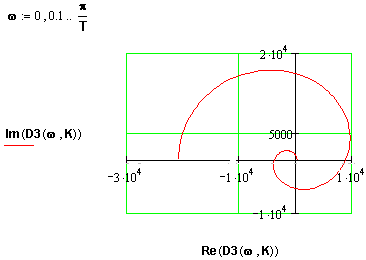
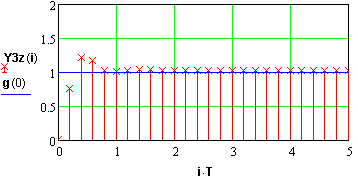
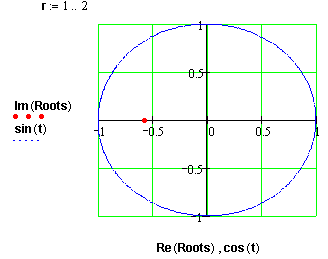
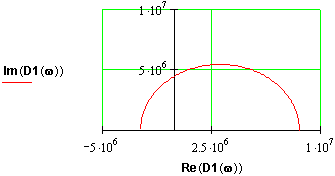
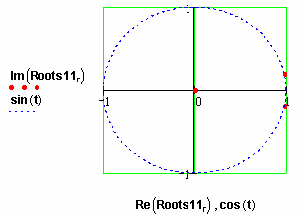
Рис.111 Розташування коренів, частотна характеристика та перехідний процес у стійкий системі 3-го проядку
Траєкторія коренів
![]()
. Положення коренів
Траєкторія коренів
Початкове
значення
![]() ,
Кінцеве значення
,
Кінцеве значення
![]() ,
Кількість
кроків
,
Кількість
кроків
![]()
![]()
![]()
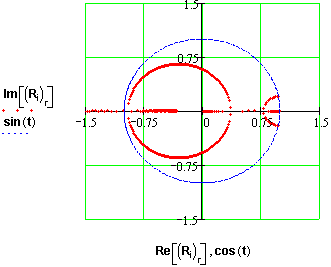
Рис 112 Корневий годограф для системи 3-го орядку
2.6.2 Співвідношення між S- та Z- площинами
Відомо,
що Z-перетворення
на відображенні на z-площині
змінної
![]() .
Якщо розглядати основну смугу у
межах
.
Якщо розглядати основну смугу у
межах
![]() ,
то контур 1-2-3-4-5-6 на s-площині
(Рис.113)
відображається у одиничне коло
z-площини
з центром у початку координат. При
цьому можна зробити такі виснавки.
,
то контур 1-2-3-4-5-6 на s-площині
(Рис.113)
відображається у одиничне коло
z-площини
з центром у початку координат. При
цьому можна зробити такі виснавки.
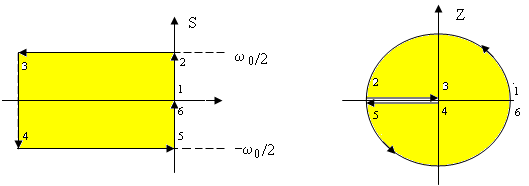
Рис.113 Відображення основної полоси у одиничне коло
Лінія
постійного згасання : на S-площині
це пряма лінія на відстані
![]() від мінливої осі; на Z-площині
це коло радіусу
від мінливої осі; на Z-площині
це коло радіусу
![]() (Рис.114).
(Рис.114).
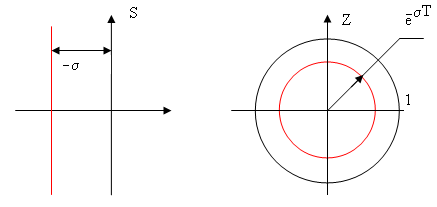
Рис 114 Лінія постійного згасання
Лінія
постійної частоти : на S-площині
це пряма лінія на відстані
![]() від дійсної осі; на Z-площині
це лінія, яка виходить з початку
координат під кутом
від дійсної осі; на Z-площині
це лінія, яка виходить з початку
координат під кутом
![]() (Рис.115)
(Рис.115)
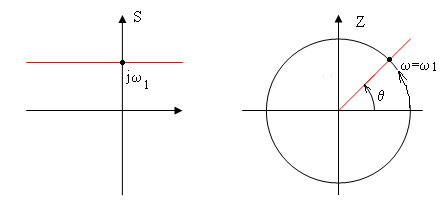
Рис. 115 Лінія постійної частоти
Лінія
постійного коефіцієнту згасання : на
S-площині
це пряма лінія
![]() ,
яка виходить з початку координат
під кутом
,
яка виходить з початку координат
під кутом
![]() від мінливої осі у додатному напрямку;
на Z-площині
це логарифмічна спіраль, яка описується
рівнянням
від мінливої осі у додатному напрямку;
на Z-площині
це логарифмічна спіраль, яка описується
рівнянням
![]() (129)
(Рис.116)
(129)
(Рис.116)
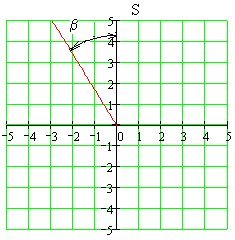
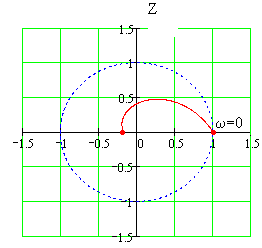
Рис.116 Лінія постійного коефіцієнта згасання
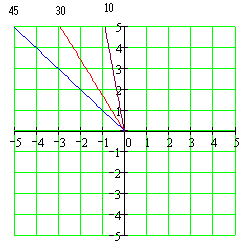
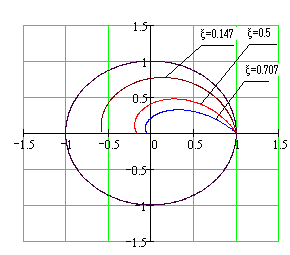
Рис.117 Вплив коефіцієнта згасання
 .
.
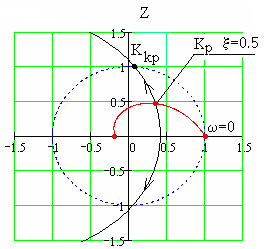
Рис. 118 Визначення заданого коефіцієнта підсилювання
Якщо нанести на ці графіки рух коренів при зміні якогось параметру системи (наприклад коефіцієнта передачі),то по точці перетину з лінією згасання можна визначити відповідний коефіцієнт , який буде забезпечувати необхідне згасання.
П 2.37
Для
дискретної системи з фіксатором
нульового порядку побудувати рух
коренів та лінію постійного коефіцієнта
згасання
![]() .
.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
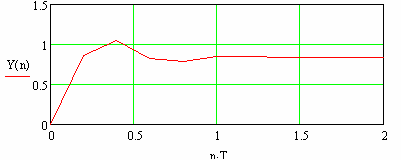
Рис.119 Перехідний процес
![]()
![]()
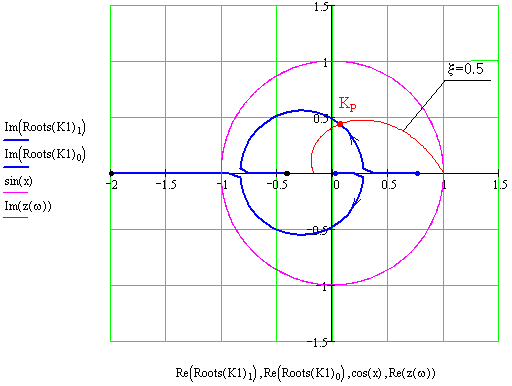
Рис 120 Корневий годограф та визначення заданого коефіцієнта передачі