

2.1.1 Складання дискретних рівнянь лінійних систем
Методику
складання дискретних рівнянь розглянемо
відносно умови функціонування дискретних
систем автоматичного управління.
Замкнення системи виконується тільки
у моменти роботи ідеального імпульсного
моменту, тобто у моменти квантування
![]() ,
а у проміжках між моментами
квантування система працює як розімкнена
при сталому впливі - сигналі, який
зберігається на виході формуючої частини
імпульсного елементу.
,
а у проміжках між моментами
квантування система працює як розімкнена
при сталому впливі - сигналі, який
зберігається на виході формуючої частини
імпульсного елементу.
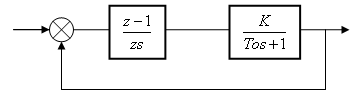
Хай у дискретній системі імпульсний
елемент генерує послідовності імпульсів
прямокутної форми з періодом
та тривалістю
![]() ,
а лінійна частина описується оператором
,
а лінійна частина описується оператором
![]() (Рис.84).
(Рис.84).
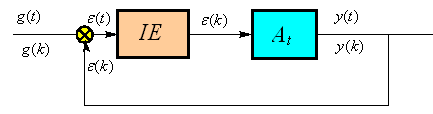
Рис.84 Типова структурна схема дискретної системи.
Вихідний
процес
![]() ,
який протікає усередині будь-якого
інтервалу дискретності
,
який протікає усередині будь-якого
інтервалу дискретності
![]() має
вигляд
має
вигляд
 (80)
(80)
де
![]() ..
..
Кінцеве
значення
на
![]() -тому
інтервалі, а отже і початкове значення
на
-тому
інтервалі, а отже і початкове значення
на
![]() інтервалі
приймає вигляд
інтервалі
приймає вигляд
![]()
Якщо неперервна частина дискретної
системи має
![]() -тий
порядок, то для визначення рішення
-тий
порядок, то для визначення рішення
![]() необхідно
розглядати процес у n попередніх
інтервалах дискретності, що зведе
рішення до вигляду
необхідно
розглядати процес у n попередніх
інтервалах дискретності, що зведе
рішення до вигляду
 (81)
(81)
Хай лінійна частина дискретної системи
має передаточну функцію
![]() ,
а імпульсний елемент генерує
послідовність імпульсів прямокутної
форми з періодом
та скважністю
,
а імпульсний елемент генерує
послідовність імпульсів прямокутної
форми з періодом
та скважністю
![]() .
Визначимо рішення диференційного
рівняння системи у межах одного циклу
квантування
.
Визначимо рішення диференційного
рівняння системи у межах одного циклу
квантування
![]() ,
який складається із двох рішень на
інтервалах
,
який складається із двох рішень на
інтервалах
![]() та
та
![]() ,
тобто як рішення рівнянь
,
тобто як рішення рівнянь
![]() та
та
![]() .
.
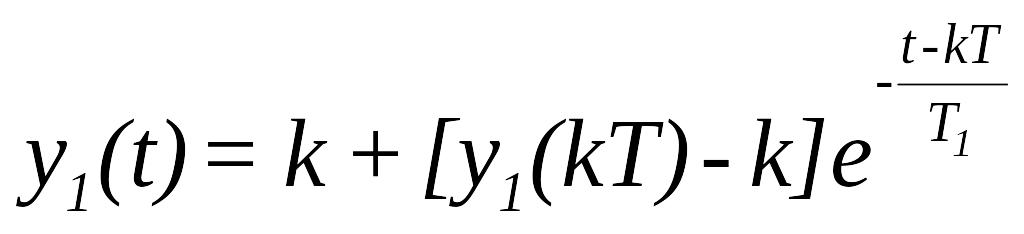
Рішення на першому інтервалі буде
![]() .
.
Постійна інтегрування отримується з урахуванням початкових умов для моменту .
![]() ,
,
![]()
Отже,
 .
.
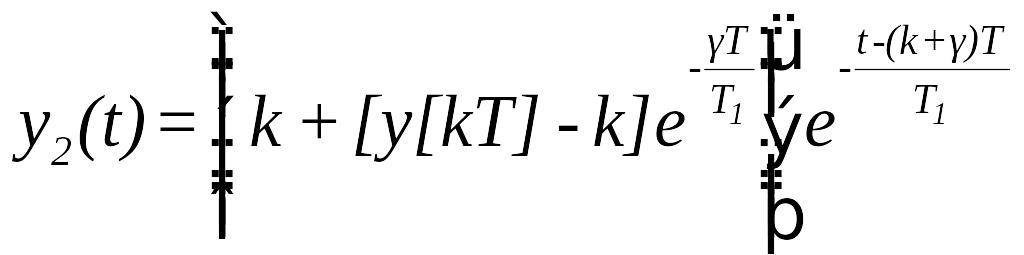
На другому інтервалі
![]()
Тому що значення
![]() на
початку інтервалу, тобто при
на
початку інтервалу, тобто при
![]() дорівнює значенню
дорівнює значенню
![]() на кінці першого інтервалу, то
на кінці першого інтервалу, то
![]()
Отже,
При
![]() одержуємо
одержуємо

З умови замкнення системи маємо
![]() а якщо система замикається одиничним
зворотнім зв'язком, то
а якщо система замикається одиничним
зворотнім зв'язком, то
![]()
Отже,

що після перетворень дає
![]()

Якщо
![]() ,
то
,
то

![]()
Тому що
![]() ,
то при
,
,
то при
,
![]() ,a
,a
![]() .
Із
.
Із
![]() характеристичне рівняння приймає вигляд
характеристичне рівняння приймає вигляд
![]() .
Отже,
.
Отже,![]()
При
![]()
![]() ,тобто
,тобто![]() .
Таким чином
.
Таким чином
![]()
Хай ![]() ,
тоді
,
тоді
![]() .
.
Якщо
![]() ,
то процес встановлюється за один крок,
система стійка і має найменший час
перехідного процесу
,
то процес встановлюється за один крок,
система стійка і має найменший час
перехідного процесу
![]() .
.
1) При,![]() ,
що дає коливальний перехідний процес.
,
що дає коливальний перехідний процес.
2) При
![]() процес
буде монотонним.
процес
буде монотонним.
3) При
![]() система
на межі стійкості.
система
на межі стійкості.
4) При
![]() система стає нестійкою.
система стає нестійкою.
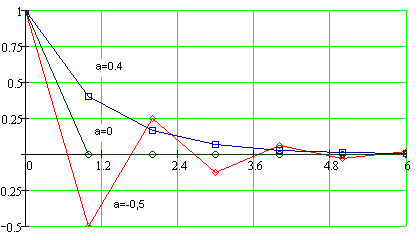
Рис. 85 Вплив кореня на вигляд перехідних процесів
2.3 Вагова (імпульсна) перехідна функція дискретної системи.
Розглянемо так звану зведену
вагову функцію
![]() розімкненого каналу керування - тобто
реакцію неперервної частини системи
з екстраполятором нульового порядку
на одиничну імпульсну функцію
розімкненого каналу керування - тобто
реакцію неперервної частини системи
з екстраполятором нульового порядку
на одиничну імпульсну функцію
![]() ,або
як відношення вихідного сигналу
,або
як відношення вихідного сигналу
![]() до висоти
до висоти
![]() одиничного імпульсу
одиничного імпульсу
![]()
![]() на вході екстраполятора .
Якщо
вихідну величину розглядати тільки
у дискретні моменти часу
на вході екстраполятора .
Якщо
вихідну величину розглядати тільки
у дискретні моменти часу
![]() ,
то розімкнений канал керування буде
представляти собою імпульсний фільтр
.Він може характеризуватися дискретною
ваговою функцією
,
то розімкнений канал керування буде
представляти собою імпульсний фільтр
.Він може характеризуватися дискретною
ваговою функцією
![]() ,
яка здобута із функції
.
,
яка здобута із функції
.
Дискретна функція
дозволяє знайти реакцію імпульсного
фільтра на вхідну величину
![]() довільного вигляду .
довільного вигляду .
Так реакція імпульсного фільтра на дискретну
y (t) при
![]() буде
буде
![]()
y (t) при
![]() буде
буде
![]()
y (t) при
![]() буде
буде
![]()
Тому
![]() ,
а для дискретних моментів часу
,
а для дискретних моментів часу
![]() .
(82)
.
(82)
Розглянемо дискретну функцію , яка зображує собою імпульсну перехідну функцію , як послідовність значень у дискретні моменти t = 0T,1T,…,nT (Рис.86)
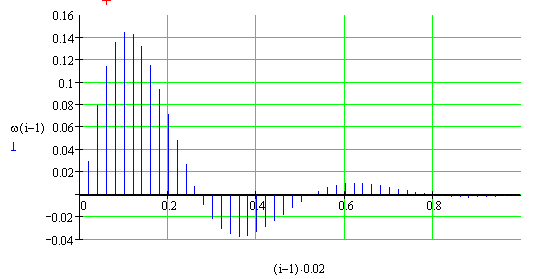
Рис. 86 Вигляд імпульсної перехідної функції
Значення послідовність
![]() дискретної функції
називаються коефіцієнтами ваги або
ваговими коефіцієнтами. Вони
характеризують долю питому вагу
значень вихідних змінних які діють
у різні моменти часу
дискретної функції
називаються коефіцієнтами ваги або
ваговими коефіцієнтами. Вони
характеризують долю питому вагу
значень вихідних змінних які діють
у різні моменти часу
![]() та
формують вихідну змінну. Таким чином
дискретну вагову функцію можна
визначити як
та
формують вихідну змінну. Таким чином
дискретну вагову функцію можна
визначити як
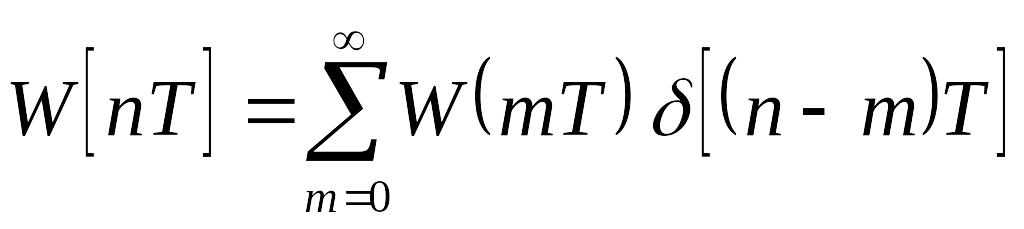 (83)
(83)
Тобто сукупність повністю визначає імпульсну (вагову) функцію дискретної системи.
2.4 Перехідна функція дискретних систем керування
Якщо на вхід дискретної системи з
відомою функцією ваги поступає
одинична функція
![]() ,
то
,
то
![]() (84)
(84)
де
![]() називається перехідною послідовністю
і є аналогом перехідної функції
називається перехідною послідовністю
і є аналогом перехідної функції
![]() неперервних систем (Рис.87)
неперервних систем (Рис.87)
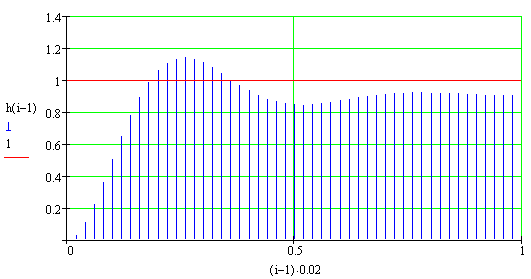
Рис. 87 Вигляд перехідної функції
П 2.24
Побудувати дискретне
рівняння для системи керування з
фіксатором нульового порядку та
оператором лінійної неперервної
частини
![]() .
.
1.Визначається рішення диференційного рівняння у межах одного циклу квантування
![]() який складається із двох рішень на
інтервалах
який складається із двох рішень на
інтервалах
![]()
та
![]() .
.
1.1 Рішення на першому інтервалі буде
![]()
Постійна інтегрування отримується з урахуванням початкових умов для моменту
,
Отже,
![]()
1.2. На другому інтервалі
![]() ,
де
,
де
![]()
Тому що значення
на
початку інтервалу, тобто при
![]() дорівнює значенню
на кінці першого інтервалу, то
дорівнює значенню
на кінці першого інтервалу, то
![]()
Отже,
При одержуємо

2. Визначається диференційне рівняння
для замкнутої системи. З умови замкнення
системи маємо
![]() а якщо система замикається одиничним
зворотнім зв'язком, то
а якщо система замикається одиничним
зворотнім зв'язком, то
![]()
Отже,

що після перетворень дає
![]()

Якщо в системі використовується фіксатор нульового порядку ( ), то

![]()
Томущо
![]() ,
то при
,
,
то при
,
![]() ,
a
,
a
![]() .
.
Із
![]() характеристичне
рівняння приймає вигляд
характеристичне
рівняння приймає вигляд
![]() .
.
Отже,
![]()
При
,
тобто
![]() .
.
Таким чином
![]()
Якщо
![]() ,
то процес встановлюється за один
крок.
,
то процес встановлюється за один
крок.
![]()
![]()
![]()
![]()
![]()
Корень характеристичного рівняння
![]()
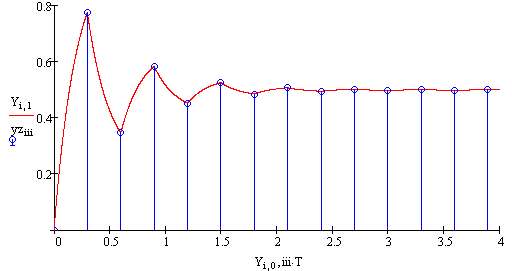
Рис 88 Перехідна характеристика до П
Лабораторна робота №3 Дослідження дискретної системи 1-го порядку
Призначення: Лабораторні дослідження націлені на закріплення знань основних підходів до складання математичної моделі системи керування у вигляді дискретних рівнянь, методів їх розвязання, аналізувати та узагальнювати здобуті експериментальні дані.
Ціль роботи: Виявлення основних співвідношень параметрів системи керування, визначення оптимальних значень параметрів у цілях мінімізації інтегральних оцінок з точки зору кінцевого часу перехідних процесів.
Вибір структури САК та її параметрів виконується виходячи із аналізу функціональної схеми блока моделі узагальненої системи керування віртуального лабораторного стенда та обраних цілей лабораторних досліджень. Значення параметрів системи обирається із таблиці варіантів
В лабораторній роботі необхідно:
Скласти математичну модель системи керуванняч у вигляді дискретних рівнянь
Розрахувати перехідний процес при заданих значеннях параметрів ЦСАК та визначити співвідношення періоду квантування з коефіцієнтом передачі системи, які забезпечують закінчення перехідного процесй за кінцевий час
Побудувати розташування коренів на комплексній площині та оцінити їх вплив на перехідний процес та покажчики якості;
Оцінити траєкторії коренів при зміні коефіцієнта підсилення системи;
Визначити залежності інтегральних оцінок I=I(Kp), I=I(T0)
Висновок. Відповідно теоретичним розрахункам та обробки експериментальних досліджень зробити висновки по лабораторній роботі згідно обраних цілей.