

1.10.9 Основнi властивостi -перетворення
1. Властивiсть лiнiйностi – зображення лiнiйної комбiнацiї дискретних функцiй дорiвнює тій самій лiнiйній комбiнацiї їх зображень.
Хай
![]()
Тодi
![]() (47)
(47)
2. Теорема зсуву.
Розглянемо
функцiю запізнення
![]() ,
тобто яка має зсув на цiле число тактiв
,
тобто яка має зсув на цiле число тактiв![]() .
.
Якщо
покласти
![]() то
то
![]()
 (48)
(48)
Якщо
вихідна функцiя при вiд'ємних значеннях
аргументу дорiвнює нулю, то
![]()
Якщо зсув виконується праворуч (упередження), то
 (49)
(49)
3. Зображення рiзниць.
Вiдповiдно теорiї зсуву
![]() .
.
При
нульових початкових умовах
![]() (50)
(50)
Аналогiчно,![]() (51)
(51)
Зазначимо,
що при
![]() (неперервнi системи)
(неперервнi системи)
 ,
,
що iлюструє схожiсть зображень похiдних та рiзницi.
4. Кiнцеве значення дискретної функцiї.
Визначимо зображення першої прямої рiзницi функцiї
![]()
Знайдемо суму ординат
![]() (52)
(52)
Тому
що
![]() ,
,
а
при
![]() ,
,
![]() ,
то
,
то
![]()
Таким
чином
![]() (53)
(53)
Порiвнюючи
вирази (52)
та (53)
для
![]() здобудемо
здобудемо
![]() (54)
(54)
5. Зв'язок дискретних рівнянь з їх -зображеннями.
Хай дискретне рiвняння має вигляд
![]() (55)
(55)
Згiдно теореми зсуву запишемо
![]()
Тодi
![]() (56)
(56)
Вивчення
вiдносин мiж
та
-
площинами при перетвореннi
![]() є важливим у зв'язку з можливостями
аналiзу розташування нулiв та полюсiв
передаточної функцiї системи на
вiдповiдних площинах.
є важливим у зв'язку з можливостями
аналiзу розташування нулiв та полюсiв
передаточної функцiї системи на
вiдповiдних площинах.
Розглянемо основну смугу та видiлимо у неї контур 1-2-3-4-5-1.
Рис. 67 Співвідношення основної смугг до одиничного кола
Тому що
![]() ,
(57)
,
(57)
то всi додатковi смуги півплощині -площини вiдображаються у теж саме одиничне коло на -площинi, а всi точки, якi належать вiдповiдному контуру, якi вiдображуються усередину одиничного кола.
Лiнiї
![]() на
-
площинi, якi паралельнi уявної осi, тобто
лiнiї сталого загасання для неперервних
систем, вiдображаються на
-площинi
колом радiусу
на
-
площинi, якi паралельнi уявної осi, тобто
лiнiї сталого загасання для неперервних
систем, вiдображаються на
-площинi
колом радiусу
![]() ( Рис. 68)
( Рис. 68)

Рис.68 Співвідношення лінії сталого згасання
Для
будь-якої лiнiї
![]() на
-площинi
на
-площинi
буде вiдповiдати лiнiя, яка виходить iз
початку координат пiд кутом
на
-площинi
на
-площинi
буде вiдповiдати лiнiя, яка виходить iз
початку координат пiд кутом
![]() рад.
рад.
П 1.13
Визначити
інтервал дискретності
![]() ,
при якому ступінчатий опис функції
,
при якому ступінчатий опис функції
![]() по дискретним точкам не приведе до
похибки не більше ніж 5% початкового
значення.
по дискретним точкам не приведе до
похибки не більше ніж 5% початкового
значення.
Найбільша крутизна заданої функції спостерігається у точці
![]()
Початкове
значення
![]() .
На першому інтервалі
.
На першому інтервалі
![]() .
.
Відкіля
![]()
![]()
П. 1.14
Для
експоненціальної функції
визначити інтервал дискретності
![]() ,
при якому лінійна інтерполяція
значень функції у середині проміжків
між дискретними точками не перевищує
1% початкового значення.
,
при якому лінійна інтерполяція
значень функції у середині проміжків
між дискретними точками не перевищує
1% початкового значення.
На першому інтервалі
 для середини відрізку
для середини відрізку
 дає
дає
 , тоді як фактичне значення для
, тоді як фактичне значення для
 буде
буде
 .
Отже,
.
Отже,
![]()
П 1.15
Для експоненціальної функції визначити - перетворення
![]() Тому
що
Тому
що
![]() ,
а перетворення Лапласа
,
а перетворення Лапласа
![]() ,
то з урахуванням
,
то з урахуванням
![]()
![]() .
Отже,
.
Отже,
![]() .
.
Для
![]() та
та
![]()
![]() .
.
П 1.16
Для при знайти зворотне - перетворення
Для
цього треба розкласти
![]() по від’ємним степеням
по від’ємним степеням
![]()
![]() .
.
П 1.17
Приклад
переходу від перетворення Лапласа до
![]() перетворення
перетворення
Задано оператор з фіксатором нульового порядку на вході
![]()
1. Визначається зворотне перетворення
![]()
Визначається перетворення
![]()
3.
Додається співмножник
![]() та спрощується вираз для
та спрощується вираз для
![]()
![]()
Спрощується результат
![]()
або
![]()
Визначається перехідний процес
![]()
Порівняння перехідних процесів дискретного та неперервного
![]()
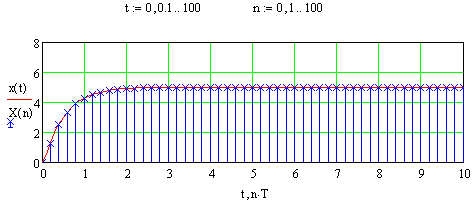
Рис.69 Перехідні процеси до П.
П 1.18
Приклад
переходу від
![]() перетворення
до дискретного перетворення Лапласа
та побудови амплітудо-частотної
характеристики
перетворення
до дискретного перетворення Лапласа
та побудови амплітудо-частотної
характеристики
![]()
![]()
![]()
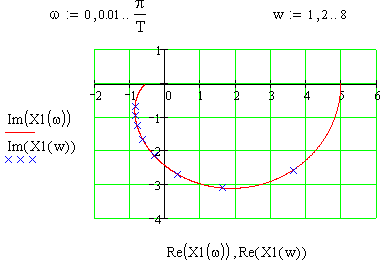
Рис.70 Амплітудо-фазо-частотної характеристика до П.