

Для вiдносного часу використовується символьна форма зображення
![]() ,
дe
,
дe
![]() .
.
1.10,6 Основнi властивостi дискретного перетворення Лапласу
1.
Теорема зсуву. Хай
![]()
Визначимо
зображення функцiї, у якої є зсув на
тактiв, тобто
![]()
![]() .
.
Виконаємо
замiну
![]() та
та
![]() .
.
Тоді

Якщо
![]() при
при
![]() дорiвнює нулю
дорiвнює нулю
![]() ,
то
,
то
![]() (37)
(37)
Аналогiчно доказується що
![]() (38)
(38)
2. Зображення рiзниць.
![]()
3. Кiнцеве значення дискретної функцiї.
Тому
що
![]()
То
![]()
Отже,
![]() .
(39)
.
(39)
1.10.7 Дискретне перетворення Фур’є
Дискретне
перетворення Фур’є здобувається при
замiнi
![]() ,
тобто
,
тобто
![]()
Знайдемо
зв'язок мiж зображенням Фур’є
![]() дискретної функцiї
iз зображенням Фур’є
дискретної функцiї
iз зображенням Фур’є
![]() неперервної функцiї
.
Тому що
неперервної функцiї
.
Тому що
![]() ,
а послiдовнiсть
,
а послiдовнiсть
![]() можна розкласти у ряд Фур’є як перiодичну
з перiодом
можна розкласти у ряд Фур’є як перiодичну
з перiодом
![]() ,
(40)
,
(40)
де

то зображення Фур’є (частотний спектр) кожного члену суми буде мати вигляд

що
з урахуванням теореми зсуву дає
![]() ,
де
,
де
![]() є приведеним комплексним коефіцієнтом
передачі, тобто
є приведеним комплексним коефіцієнтом
передачі, тобто
![]() .
.
Таким
чином для
![]()
![]() ,
тобто
частотний спектр першого члена суми
представляє собою частотний спектр
корисного модулюючого неперервного
сигналу.
,
тобто
частотний спектр першого члена суми
представляє собою частотний спектр
корисного модулюючого неперервного
сигналу.
Якщо
![]() ,
то
,
то
![]()
тобто
частотний спектр другого члена суми
представляє собою частотний спектр
модулюючої функцiї, але яка має зсув по
осi часу на величину
![]() .
.
Таким чином, для всiєї дискретної послiдовностi
![]() (41)
(41)
тобто
![]() пропорцiйний
сумi спектрiв, якi мають сталий зсув
пропорцiйний
сумi спектрiв, якi мають сталий зсув![]() .
.
При
опису сигналiв було встановлено, що для
вiдтворення неперервного сигналу iз
дискретної послiдовностi повинна
виконуватись умова
![]() де
де
![]() при якій частотнi спектри не перекриваються
(Рис.62).
при якій частотнi спектри не перекриваються
(Рис.62).
Рис.62 Спектри, що не перекриваються
Таким чином, очевидно, що спектр у загальному випадку у не співпадає з
![]()
i
тiльки у випадку
![]()
![]()
Отже,
перетворення Лапласа дискретної функцiї
часу є перiодичною функцiєю з частотою
повторення
![]()
![]() (42)
(42)
тому
що для цiлих
та
витiкає
![]() .
.
З
цього слiдує, що для будь якої даної
точки
![]() на
на
![]() -площинi
комплексної зміїної
функцiя
-площинi
комплексної зміїної
функцiя
![]() має однаковi значення для всiх перiодичних
точок
має однаковi значення для всiх перiодичних
точок![]() ,
а вся лiва півплощина
-площини
розбивається на смуги, ширина яких
дорiвнює
(63).
,
а вся лiва півплощина
-площини
розбивається на смуги, ширина яких
дорiвнює
(63).
Рис.
63
Основна полоса в межах
![]()
Смуга в межах називається основною смугою.
Отже,
якщо
![]() ,
то
,
то
![]() основна
смуга розширюється до всiєї площини
.
При цьому дискретна система перетворюється
у неперервну, тобто
основна
смуга розширюється до всiєї площини
.
При цьому дискретна система перетворюється
у неперервну, тобто
![]() .
.
П 1.12
Визначити
частотний спектр
![]()
![]()
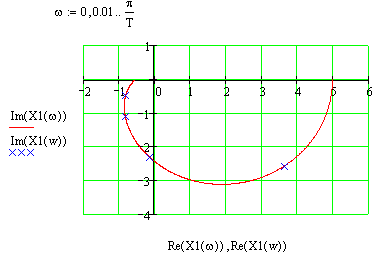
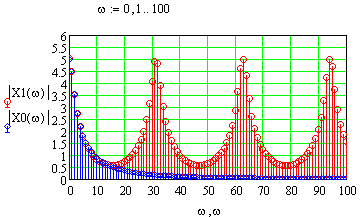
Рис.64 Амплітудо-фаза-частотна характеристика та спектральна характеристика дискретної ланки
1.10.8 Z – перетворення
Вiдомо,
що функцiя
може бути представлена у дискретній
формi як послiдовнiсть iмпульсiв у моменти
часу
![]() ;
при цьому площина кожного iмпульсу
дорiвнює значенню функцiї у вiдповiднi
моменти часу.
;
при цьому площина кожного iмпульсу
дорiвнює значенню функцiї у вiдповiднi
моменти часу.
Перетворення Лапласу такої функцiї має вигляд
![]()
показує,
що
є нескiнченний ряд по
![]()
![]()
Однак така форма виключає можливе використання звичайних методiв аналiзу у площинi , бо змiнна входить у цей вираз нераціонально.
Якщо
зробити пiдстановку
![]() ,
то
,
то
![]() (43)
(43)
при цьому виконується перехiд до iншої змiнної , тобто до так званого -перетворення.
![]() (44)
(44)
Метод -перетворень був запропоновано у 1730 р. Де Муавром. Пiзнiше у 1812р. Лаплас поширив на теорiю ймовiрностей. Метод -перетворень є одним iз засобiв дослiдження дискретних систем у часовій та частотній областях.
Якщо
розглянути послiдовнiсть
![]() i використати дискретне перетворення
Лапласу
i використати дискретне перетворення
Лапласу
![]() та перейти до
-
перетворення
та перейти до
-
перетворення
![]() ,
то можна побачити, що значення
,
то можна побачити, що значення
![]() є коефіцієнтами при вiдповiдних
є коефіцієнтами при вiдповiдних
![]() розкладання у ряд по степеням
розкладання у ряд по степеням
![]() виразу
виразу![]() .
При цьому очевидний зв'язок мiж
-
перетворенням та дискретними рiвняннями.
.
При цьому очевидний зв'язок мiж
-
перетворенням та дискретними рiвняннями.
Таким
чином, якщо функцiю задано у виглядi
![]() то задача знаходження оригіналу
заключається у розкладеннi
у ряд по степеням
то задача знаходження оригіналу
заключається у розкладеннi
у ряд по степеням
![]() .
При цьому коефiцiєнти при відповідних
членах з відповідною степінню
дозволяє зробити різницеві рiвняння.
.
При цьому коефiцiєнти при відповідних
членах з відповідною степінню
дозволяє зробити різницеві рiвняння.
Отже,
![]() ,
де коефiцiєнти
,
де коефiцiєнти
![]() визначають дискретнi значення послiдовностi
визначають дискретнi значення послiдовностi
![]()
Треба
визначити, що перетворення
![]() відповідає
умовам однозначностi. Однак зворотне
-перетворення
неоднозначне, тому що функцiя
у промiжках мiж моментами квантування
не визначена.
відповідає
умовам однозначностi. Однак зворотне
-перетворення
неоднозначне, тому що функцiя
у промiжках мiж моментами квантування
не визначена.
Якщо для функцiї аргументу є перетворення Лапласу тo - перетворення вiдповiдно визначенi як
 (45)
(45)
Вiдомо,
що зворотне перетворення Лапласу має
вигляд
де
![]() - абсциса збігання, яка вибирається
таким чином, щоб особливі точки
підiнтегральної функцiї
- абсциса збігання, яка вибирається
таким чином, щоб особливі точки
підiнтегральної функцiї
![]() лежали лiворуч вiд неї (Рис.65).
лежали лiворуч вiд неї (Рис.65).
Рис. 65 Співвідношення та S площини
Для зворотного - перетворення є аналогiчний вираз
![]() ,
(46)
,
(46)
де
![]() -
замкнений контур на
-
площинi, який включає всi особливі точки
-
замкнений контур на
-
площинi, який включає всi особливі точки
![]() .
.