

Міністерство освіти і науки, молоді та спорту України
Національний технічний університет України
«Київський політехнічний інститут»
Методичні вказівки
до виконання курсового проекту
для студентів напряму 6.051003
з навчальної дисцепліни “Прикладна механіка”
Затверджено на засіданні кафедри наукових, аналітичних
та екологічних приладів і систем
Протокол № від 21.12.2012 р.
Київ 2012 р.
Методичні вказівки до курсового проекту для спеціальності 6.051003 “Прикладна механіка»/ Уклад.: В.С. Ковтун,
Методичні вказівки
до виконання курсового проекту
для студентів 6.051003
“Прикладна механіка»
Укладач: Ковтун Валерій Сергійович, д-р техн. наук, проф.
Відповідальний
редактор Маркін Максим Олександрович, к.т.н.
Рецензент Маслов Володимир Петрович, д-р техн. наук, проф.
ЗАГАЛЬНІ ПОЛОЖЕННЯ
Згідно з навчальним планом студенти, які вивчають курс «Прикладна механіка», повинні виконувати курсові проекти, спрямовані на формування навичок для розрахунку кінематичного і динамічного дослідів механізму.
Мета курсового проекту – довести, що її автор володіє необхідними теоретичними і практичними знаннями з навчальної дисципліни «Прикладна механіка».
Курсовий проект з навчальної дисципліни «Прикладна механіка» повинен носити характер самостійної науково-розрахункової роботи. Виклад матеріалу не повинен обмежуватися лише описовим підходом до розкриття обраної теми, а також має відображати авторську аналітичну оцінку стану досліджуваної проблеми й власну точку зору на можливі варіанти її вирішення.
В цих методичних вказівках приведена послідовність виконання робіт та практичні рекомендації по виконанню курсового проекту.
Завданням проекту з курсу «Прикладна механіка» є розвиток у студентів звичок самостійної роботи з конструюванню, в процесі якого, студенти практично використовують знання, отримані при вивченні курсу в області розрахунку та конструювання елементів приладів.
СТРУКТУРА І ЗМІСТ КУРСОВОГО ПРОЕКТУ
Курсовий проект з навчальної дисципліни «Прикладна механіка» – це робота, яка містить вичерпну систематизовану інформацію за обраною темою (приблизно 25-30 друкованих сторінок формату А4 і два аркуші креслень формату А1) і передбачає виклад матеріалу на основі методичних вказівок спеціально підібраних джерел та самостійно проведеного дослідження.
Курсовий проект повинна відповідати вимогам до наукової публікації, які регламентуються Державним стандартом України.
У курсовому проекті повинні бути відображеними:
Структурний аналіз та класифікації кривошипо-шатунного механізму. Побудувати структурну схему механізму. Визначити ступінь рухливості та клас механізму.
Провести кінематичні дослідження механізму. Побудувати кінематичну схему механізму в декількох положеннях.
Кінематичні дослідження механізму. Визначити тиск в усіх кінематичних парах механізму в положеннях, вказаних керівником проекту.
Структура курсового проекту:
титульний аркуш;
зміст;
перелік умовних позначень, символів, одиниць скорочень і термінів (за необхідності);
вступ;
суть курсового проекту (основна частина);
висновки;
список використаних джерел (перелік посилань);
додатки (за необхідності)
Титульний аркуш
Титульний аркуш є першою сторінкою курсового проекту, який містить:
найменування вищого навчального закладу, факультету, кафедри;
назву роботи та навчальної дисципліни;
прізвище, ім’я, по батькові виконавця курсового проекту;
науковий ступінь, вчене звання, прізвище, ім’я, по батькові наукового керівника курсової роботи;
м. Київ та рік.
Зміст курсового проекту
Зміст подають безпосередньо після титульного аркуша, починаючи з нової сторінки. До змісту включають структурні елементи у такому порядку: перелік умовних позначень, символів, одиниць скорочень і термінів (за необхідності); вступ; послідовно перелічені найменування всіх розділів, підрозділів і пунктів (якщо вони мають заголовки) основного змісту роботи; висновки; рекомендації (за необхідності); список використаних джерел; назви додатків; номери сторінок, які містять початок відповідного матеріалу.
Перелік умовних позначень, символів, одиниць скорочень і термінів
Перелік умовних позначень, символів, одиниць скорочень і термінів складають за умови повторення таких елементів більше трьох разів у тексті та вміщують безпосередньо після змісту, починаючи з нової сторінки.
Якщо у курсовому проекті вжита специфічна термінологія, чи використано маловідомі скорочення, нові символи, позначення і таке інше, то їх перелік може бути поданий у вигляді окремого списку, який розміщують перед вступом. Перелік треба друкувати двома колонками, в яких зліва, за абеткою, наводять скорочення, справа – їх детальне розшифрування.
Вступ
Вступ розташовують після переліку умовних позначень, символів, одиниць скорочень і термінів (якщо він є), починаючи з нової сторінки. У вступі курсового проекту розкривають актуальність і стан наукової задачі та її значущість, підстави та вихідні дані щодо подальшої розробки теми, обґрунтування необхідності проведення дослідження.
Актуальність теми – це важливість, суттєве значення, відповідність теми сучасним проблемам певної галузі науки та перспективам її розвитку, практичним завданням відповідної сфери діяльності. Вона характеризує співвідношення між тим, що з даної проблеми вже відомо і що буде досліджуватися. Достатньо стисло викласти:
соціальну значущість проблеми дослідження курсового проекту;
суттєвість її значення для подальшого розвитку відповідної галузі науки, теорії чи практики;
Одна з найважливіших задач у підготовці інженера (проектанта, технолога, дослідника) – навчити творчо використовувати при вирішенні поставлених задач набуті знання. З розвитком науки і техніки проблемні питання вирішують з урахуванням все зростаючої кількості факторів, що базуються на даних різних наук, тому вміння працювати на поєднанні різних дисциплін є показником підготовленості сучасного спеціаліста і одним з найнеобхідніших умов для продуктивної творчої діяльності.
Мета проекту – це кінцевий результат, на досягнення якого спрямоване виконання проекту. Для виконання цього студент повинен вивчити основні положення теорії машин та загальні методи кінематичного і динамічного аналізу синтезу механізмі, а також набути навиків в застосуванні цих методів дослідження і проектування кінематичних схем механізмів різних типів.
Завдання проекту подаються у формі переліків: «накреслити», «визначити», «проаналізувати», «розрахувати», «вивчити», «проаналізувати», «встановити», «з’ясувати» та ін. Формулювати завдання слід зрозуміло, стисло, конкретно.
Основна частина курсового проекту
Це – головна частина курсового проекту, яка розкриває суть роботи. Вміщують її після вступу, починаючи з нової сторінки. Вона може складатися з розділів, підрозділів, пунктів, підпунктів.
Кожен розділ починають з нової сторінки. Суть роботи – це виклад відомостей про предмет дослідження, необхідних і достатніх для розкриття сутності даної роботи (опис теорії, методів, характеристик, принципів розрахунку і т. ін.) та її результатів.
Викладаючи суть роботи, особливу увагу приділяють елементам новизни, які мають місце у курсовому проекті.
У розділах основної частини подають:
огляд джерел за темою курсового проекту;
виклад загальної методики та основних методів кінематичного дослідження механізму;
побудова діаграм, планів швидкості та прискорення;
розрахунки.
Компонування механізмів.
Скласти циклограму руху відомих (працюючих) ланок комплексу механізмів даної машини.
Накреслити кінематичну схему комплексу у положенні, в якому чітко видно взаємне розташування усіх ланок.
Структурний аналіз і класифікація шарнірно-ричагового механізму.
Побудувати структурну схему механізму.
Визначити степінь рухомості механізму.
Розчленувати механізм на структурні групи і визначити їх клас і порядок.
Написати формулу створення механізму.
Кінематичне дослідження шарнірно-ричагового механізму.
Побувати кінематичну схему механізму в положеннях, відповідних 8 рівновіддаленим положенням ведучої ланки. За початкове (нульове) прийняти положення, в якому працююча ланка знаходиться на початку робочому ході, тобто в самому крайньому розташуванні. Якщо серед побудованих розташувань механізму не виявляється розташування, що відповідає другому крайньому положенні працюючої ланки, то потрібно добудувати його.
Побудувати діаграму переміщення s = s (𝝋) ,будь-якої точки працюючої ланки за цикл руху механізму. Необхідно пам’ятати, що вісь абсцис ділиться на частини, пропорційні кутам повороту ведучої ланки.
Методом графічного диференціювання побудувати діаграми v = v (t) і тангенціальне прискорення
 точки, для якої побудована діаграма s
= s
(𝝋).
точки, для якої побудована діаграма s
= s
(𝝋).Побудувати діаграми v = v (s) і
 ,
виключно з вищевказаних діаграм спільний
параметр t.
,
виключно з вищевказаних діаграм спільний
параметр t.Визначити масштаби всіх побудованих діаграм.
Побудувати плани швидкостей для всіх накреслених положень механізму.
Побудувати плани прискорень для положень, вказаних викладачем курсового проекту.
Визначити величину та напрямок кутів швидкостей та прискорень для всіх ланок механізму в положеннях, для яких є плани швидкостей та прискорень. Значення величин швидкостей та прискорень представити у вигляді таблиці.
Кінематичне дослідження шарнірно-важільного механізму
Визначити сили інерції ланців в положеннях механізму, для яких побудовані плани прискорень. Значення величин сил інерції представити також в таблиці.
Визначити точки прикладення результуючих сил інерції ланців в положеннях механізму, для яких проводиться силовий розрахунок.
Визначити тиск у всіх кінематичних парах механізму в положеннях, вказаних керівником проекту.
Примітки.
Масштаб
планів сил ![]() потрібно
вибрати так, щоб всі плани були чіткими
і займали максимально можливу площу
креслення. Вектор сил, які при прийнятому
масштабі
потрібно
вибрати так, щоб всі плани були чіткими
і займали максимально можливу площу
креслення. Вектор сил, які при прийнятому
масштабі
![]() зображуються
відрізками, меншими
2 мм,
на плані сил відкладати на потрібно.
зображуються
відрізками, меншими
2 мм,
на плані сил відкладати на потрібно.
Висновок. На основі проведеного кінематичного і кінетостатичного дослідження механізму відмітити гідність і недоліки заданого механізму, придатність його у використанні для виконання проектованого технологічного процесу, дати рекомендації по вдосконаленню механізму.
Приклад виконання
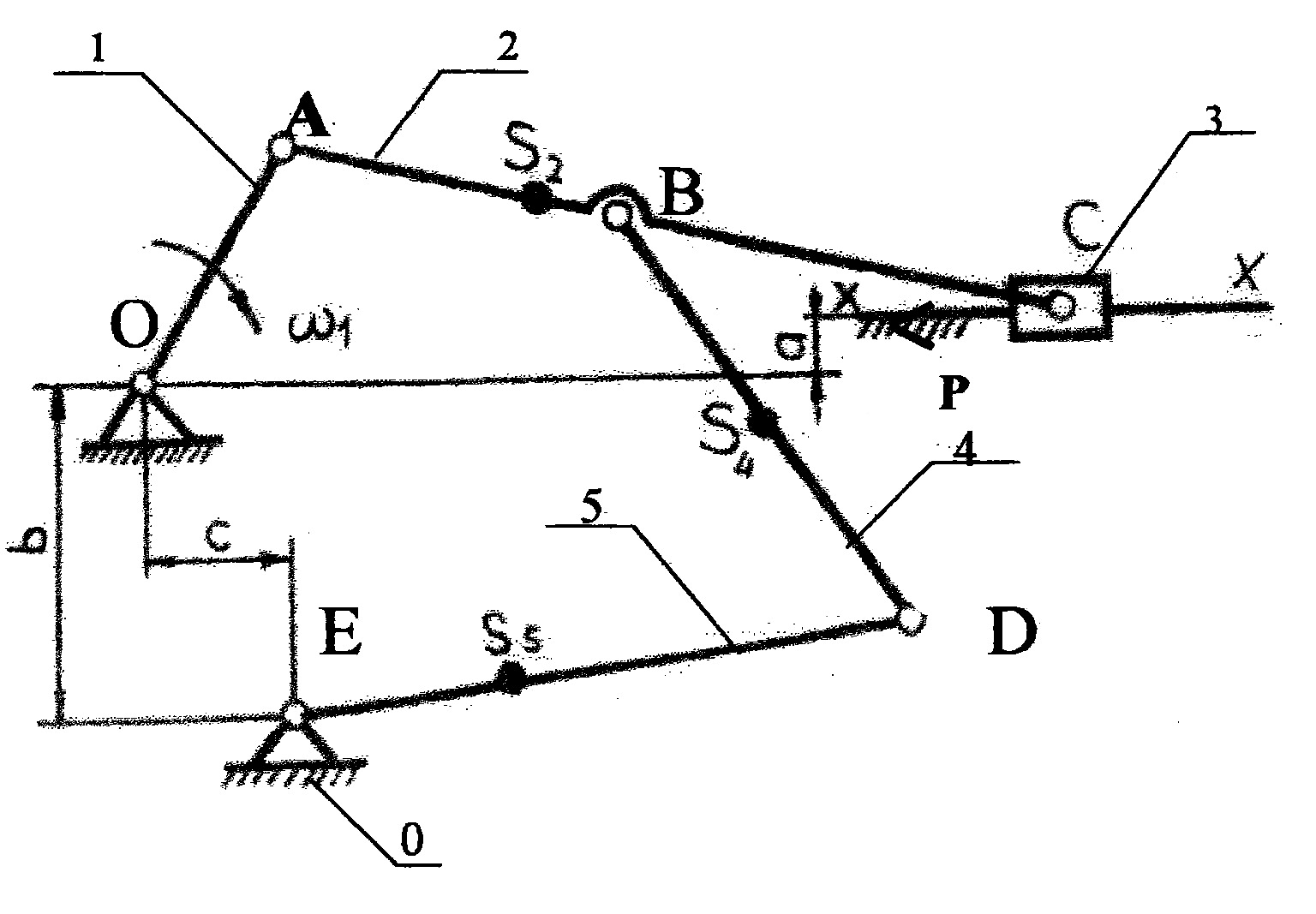
Рис. 1. Схема механізму
Приклад
виконання
довжина ланки 0Ао- початкове положення ланки 1.
Р, н |
С2, н |
С3, н |
С4, н |
С5, н |
200 |
80 |
100 |
50 |
40 |
|
|
|
|
|
|
|
|
|
|
c, |
b, |
а, |
рад/с |
град |
м |
м |
м |
м |
м |
м |
м |
м |
м |
м |
м |
20 |
120 |
0,2 |
0,8 |
0,4 |
0,4 |
0,3 |
0,4 |
0,2 |
0,15 |
0, 7 |
0, 3 |
0 |
На рис. І представлений кривошипно-шатунний механізм. Він складається із 5 ланок (1,2,3,4,5), 7 нижчих кінематичних пар (О,А,В,С,С;,Д і Е) і корпусу (О). Використовують цей механізм для перетворення обертового руху в поступальний.
Ланка 1 з’єднується із двигуном. Найчастіше швидкість цієї ланки со і є рівномірна. Повзун 3 переміщується вздовж осі х-х. Ланки 2 і 4 мають складний рух, який складається із двох, це - обертовий і поступальний.
2. Структурний аналіз механізму
Розділити механізм на структурні групи.
Структурні групи ( або групи Асура ) мають ступінь рухомості рівний нулю. Тому даний механізм має дві групи Ассура.
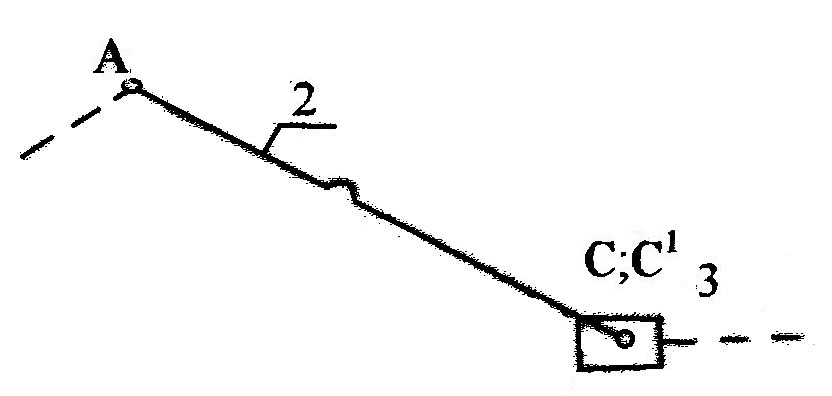
Перша група - С СА складається із ланок 3 і 2 , які мають дві кінематичні обертові пари
(А і С) і одна пара, яка має посту пальний рух (це куліса 3 і корпус 0 ).
Ступінь рухомості групи буде дорівнювати:
W =3n-2P5 =3*2-2*3 = 0.
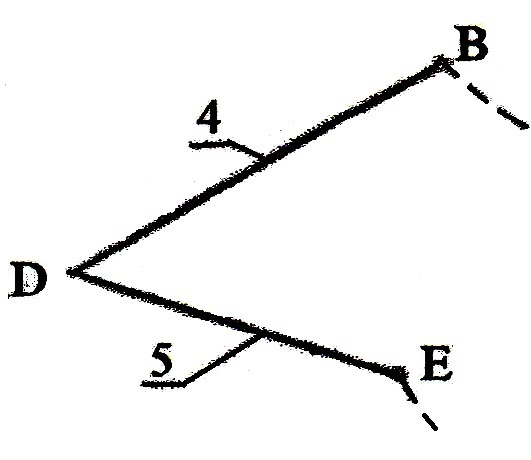
Друга група Асура складається із ланок 4 і 5 , які формують три обертові пари ( В, Д, Е ). Ступінь рухомості буде дорівнювати:
W= 3n-2P5=3*2-2*3=0.
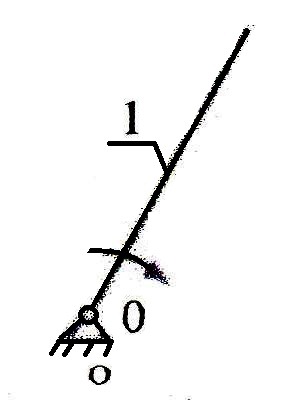
Залишається група, яка складається із ланки 1 і корпуса.
Ця кінематична група називається початковим механізмом. Кінематичні групи представлені на рис.2.
Клас кожної групи Асура.
Цей механізм має дві групи Ассура (рис. 2). Із цих рисунків видно, що кожна група має два елементи (ланки) і три кінематичні пари. Це є групи другого класу.
Клас механізму.
Відомо, що клас механізму визначається через найвищий клас групи Ассура в механізмі. Механізм, який розглядається, має найвищий клас 2. Виходячи із цього, даний механізм є 2 класу.
Ступінь рухомості механізму.
Ступінь рухомості механізму визначається за допомогою формули Чебишева:
(1)
де W - ступінь рухомості механізму, п - кількість рухомих ланок, U
Р5 — кількість нижчих пар, ' Р4 - кількість вищих пар.
n = 2(4;5)
P,= 3(B;D;E)
Ps=0;
W=0.
а) Група Ассура 1 модифікації 2 класу
n = 2(2;3)
P1 = 3(A,C;Cl);
Ps=0;
W=3*2-2*3=0
б) Група Ассура 2 модифікації 2 класу.
n = 1
Pi=l(0);
Ps=0;
W=l.
в) Початковий механізм
Рис.2. Структурні групи
Для механізму на рис. 1 маємо:
n = 5(1,2,3,4,5),
P5 = 7(0,A,B,C,C',A,E).
Тоді:
W = 3*5-2*7 = 1.
Звідси можна констатувати, що механізм має ступінь рухомості 1. Це означає, що для приводу в рух механізму достатньо взяти один двигун.
З. Кінематичний аналіз
3 .1 Побудова схеми механізму в 12 позиціях.
Спочатку розраховують довжини ланок на схемі із допомогою формули:
Таким чином одержують:
ОА =1OA\ µ1=0,2\0,005=40мм,
AB = ВС = 1AB\ µ1=0,4\0,005=80мм, (2)
DE = 1DE \ µ1 = 0,3 \ 0,005 = 60 мм,
BD = lBD / µ1 = 0.4/0.005 = 80мм,
С = с\ µ1 = 0,7 \ 0,005=140мм,
в = в / µ1=0.3/0,005 = 60мм. де µ1 - масштаб ланки.
В цьому випадку вибираємо його µ1=0,005 м/мм.
Згідно із одержаними результатами будують кінематичну схему механізму таким чином. Викреслюють коло радіусом ОА = 40 мм (див. рис. 3.) Потім ділять його на 12 рівних позицій, починаючи із крайньої АО, коли ланки 1 і 2 накладаються, а відстань між крапками О і С буде найменша.
Вона може бути підрахована так:
OCmin = АС-АО=І60-40 = 120 мм. (3)
Відкладають відстань OCmin на пряму х-х, одержують другу крайню позицію крапки С.
Потім знаходять положення крапки Е із допомогою двох величин:
В = 60 мм; С = 140мм.
Потім викреслюють дугу радіусом ED = 60 мм, з центром Е. З допомогою циркуля беруть довжину BD=80 мм і роблять позначку на одержаній дузі. Таким чином, маємо позиції усіх крапок ланок механізму.
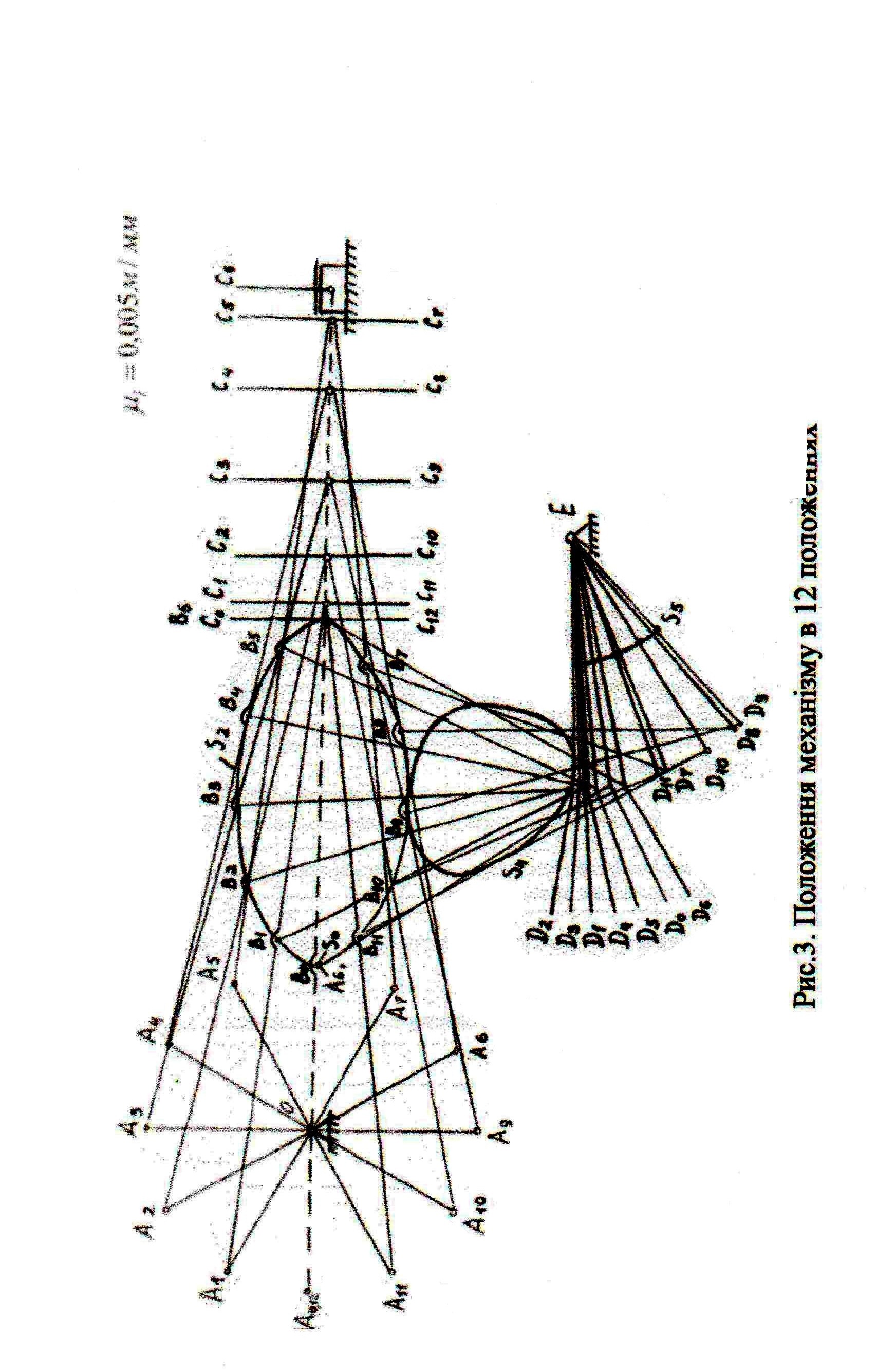
Щоб одержати початкову позицію механізму, необхідно добавити відмічені крапки. Таким чином будують ще 11 позицій механізму (рис. 3.). Після цього відмічають центри мас ланок в 12 позиціях і проводять плавну криву через центри мас. Так одержано траєкторію центрів мас ланок.
Побудова діаграми переміщення
Діаграму переміщення будують в системі координат (S, t), де S - переміщення необхідної крапки, t - час.
На горизонтальну вісь наносять відрізок £ , який представляє час Т одного оберту ведучої ланки
T = 60\n1=µ1* l (4)
де ni - число обертів за хвилину ланки 1.
Ураховуючи, що
n1 = 30ω1\π,
визначають масштаб часу, таким чином
µ1=60\ n1 £ . (5)
Після
цього ділять відрізок £
(рис.4) на 12 рівних частин, і наносять
крапки
![]() ...
і відкладають переміщення необхідної
крапки (наприклад С). Таким чином одержують
відрізки
= Со
- Сі;
2 - 27
= Со - С2
і так далі.
...
і відкладають переміщення необхідної
крапки (наприклад С). Таким чином одержують
відрізки
= Со
- Сі;
2 - 27
= Со - С2
і так далі.
В цьому випадку:
![]()
де - масштаб діаграми переміщення,
![]() - масштаб схеми механізму.
- масштаб схеми механізму.
Після цього проводять плавну криву, яка проходить через крапки 1,2,3 і так далі. Таким чином одержують діаграму переміщень необхідної крапки механізму.
Для одержання діаграм швидкості і прискорення необхідно два рази продиференціювати одержану діаграму
S= f S(1).
Це робиться графічно. Як результат, одержують слідуючі функції:
V= f v(t) (рис.4в) ,
C=f a(t) (рис. 4с),
Для підрахунку швидкостей і прискорень необхідно знати їх масштаби, які можно вичислити по формулі:
![]() (6)
(6)
![]() (7)
(7)
В цьому разі мають
![]() =
=0,005м/мм.
=
=0,005м/мм.
Число обертів за хвилину буде
![]() =30*20\3,14
= 191,8 об/хв.
=30*20\3,14
= 191,8 об/хв.
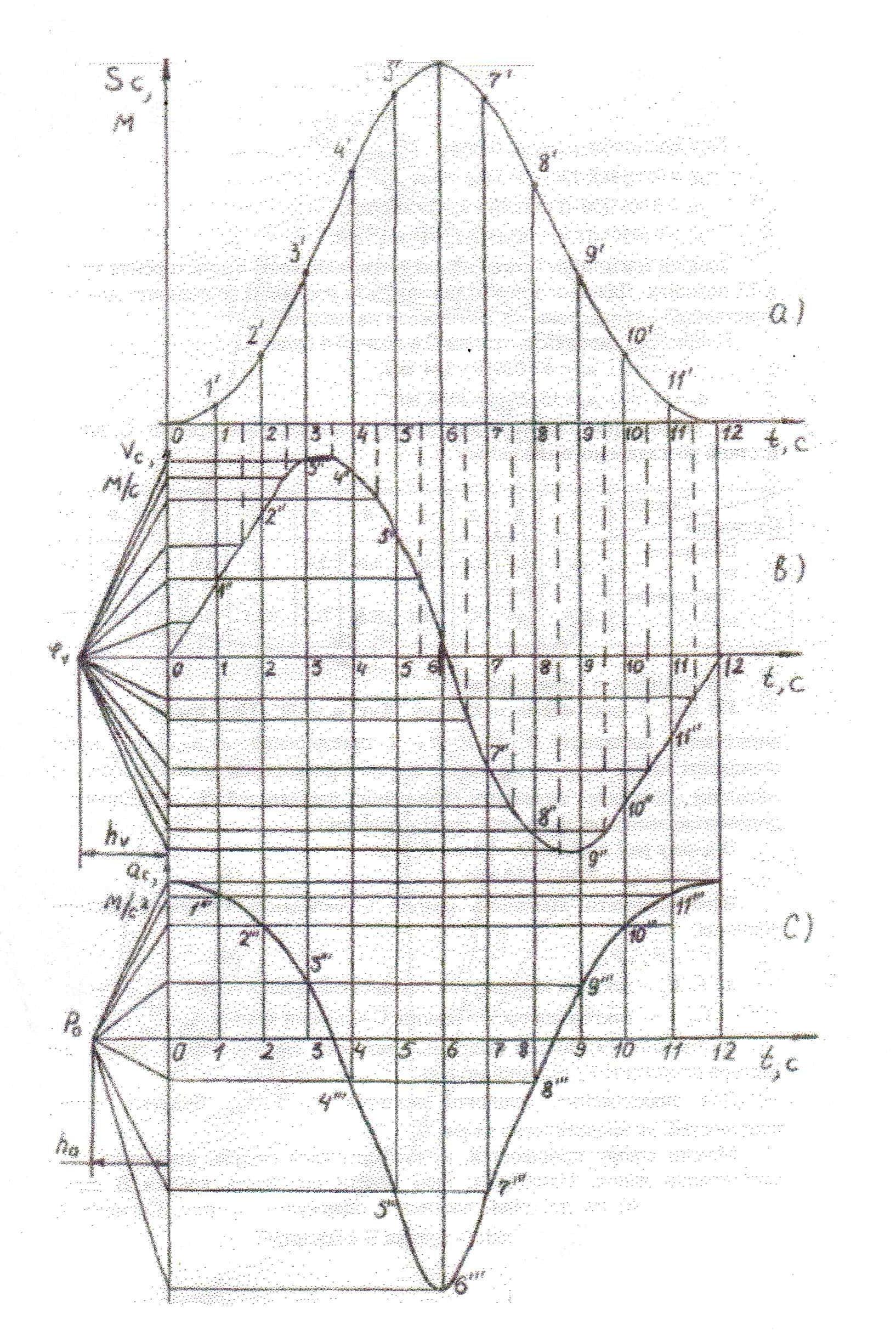
Рис.4. Діаграма переміщень, швидкостей та прискорень.
Тоді
масштаби ![]() ,
,
![]() ,
,![]() будуть
будуть
=604191,8*120)= 1\383,6 с/мм ,
= 0,005 \ (20*(1\ 383,6)) = 0,0959 м/с/мм,
= 0,0959 \ (18*(1\ 383,6)) = 2,044 м/с2/мм.
Знаючи масштаби, можна підрахувати швидкості і прискорення крапки в 12 позиціях. Для цього необхідно заміряти необхідні координати діаграми швидкостей і прискорень і їх помножити на масштаб.
Наприклад, швидкість крапки С в позиції 4 буде:
V4 = (4 - 4")* = 40* 0,0959 = 3,84 м/с,
![]() =
( 4-4//;)
=15*2,044=
30,66 м/с2.
=
( 4-4//;)
=15*2,044=
30,66 м/с2.
В таблиці представлені швидкості і прискорення крапки С для 12 позицій розглядаємого механізму
Позиція Параметри |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
Швидкості, м/с Прискорення, м/с2 |
0 72,4 |
1,8 64 |
3,4 52 |
4.4 24.4 |
3,89 30,66 |
2,9 71,5 |
0 123,5 |
2,9 71,5 |
4,2 27,7 |
4.4 21.4 |
3,4 52 |
1,8 64 |
Швидкості і прискорення.
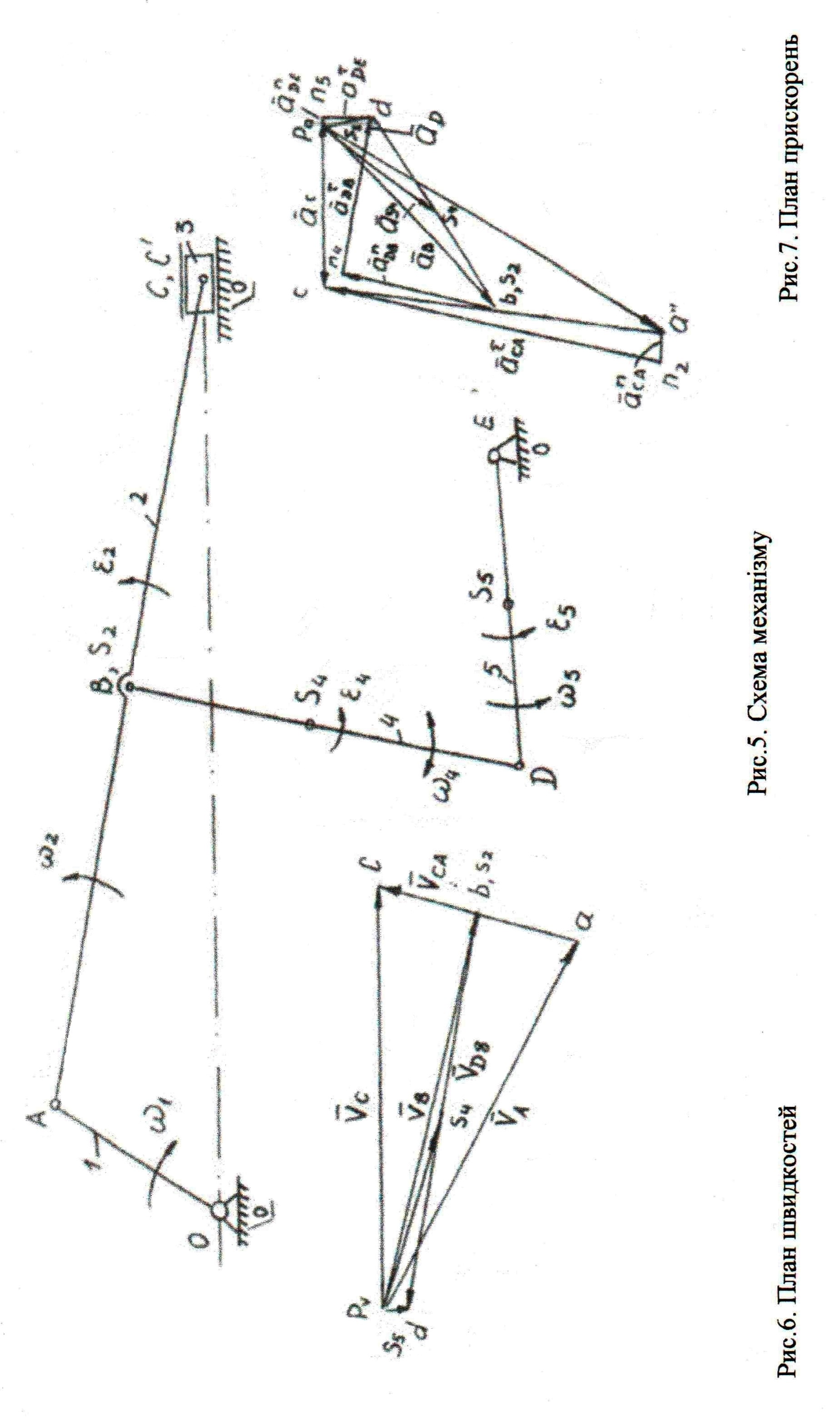
На
рис. 5 дана схема механізму. Кут (φ1
=120°. При цьому необхідно підрахувати
швидкості
![]() і
прискорення аА,
ав,
ас,
аD,
кутові швидкості ланок ω2,
ω4,
ω5
, а також кутові прискорення ланок ԑ2,
ԑ4,
ԑ5.
Ця методика дозволяє визначити величини
швидкостей і прискорень з допомогою
знайомих формул, а другі - графічно.
і
прискорення аА,
ав,
ас,
аD,
кутові швидкості ланок ω2,
ω4,
ω5
, а також кутові прискорення ланок ԑ2,
ԑ4,
ԑ5.
Ця методика дозволяє визначити величини
швидкостей і прискорень з допомогою
знайомих формул, а другі - графічно.
В даному виразі швидкість крапки А буде:
VА = ω1* lOA = 20 * 0,2 = 4,0 м/с, . (8)
Щоб одержати швидкість крапки С складають наступне векторне рівняння:
![]() =
=![]() +
+![]() (9)
(9)
де , - вектори абсолютних швидкостей крапок А і С,
- вектор швидкості крапки С відносно крапки А.
В рівнянні (9) відомі напрямки векторів швидкостей, і тільки для вектора швидкості відомий модуль.
Для
знаходження величини векторів
і
будують епюру швидкостей, як представлено
на рис.6. Маючи епюру швидкостей, можна
одержати модуль швидкості будь якої
крапки ланок. Наприклад, щоб знайти
швидкість крапки В ділять відрізок
(рис. 6) на дві рівні частини і одержують
крапку в
Сегмент
![]() представляє абсолютну швидкість
крапки
В в масштабі
.
представляє абсолютну швидкість
крапки
В в масштабі
.
Абсолютна швидкість крапки D може бути записана векторним рівнянням
![]() =
=![]() +
+![]() (10)
(10)
Трикутник Pvbd являється графічним рішенням векторного рівняння (10).
Використовуючи рис. 6, мають:
VB =(РVB)*µv =76*0,05 = 3,8 м/с,
VC = (РVC)* µv =78*0,05=3,9 м/с,
VD=(РVD) * µv =6*0,05 = 0,3 м/с,
VCA =(СА) * µv =40*0,05=2 м/с,
VDB =(DB) * µv = 72*0,05 = 3,6 м/с, де
µv = VCA\lCA =4,0\80 = 0,05м/с/мм.
Кутові швидкості ланок будуть наступні:
для ланки 2
ω2 = VCA\lСА = 2 \ 0,8 = 2,25 рад/с,
для ланки 4
ω4 =VDB\lDB =3,6\0,4=9 рад/с,
для ланки 5
ω5 = VDE\lDE =0,3\0,3=1 рад/с.
Для знаходження прискорень необхідних крапок схеми спочатку потрібно знайти прискорення крапки А:
аА =ω21* lОА =202*0,2=80м/с2.
Для
одержання прискорення крапки С
використовують слідуюче векторне
рівняння:A=
![]() A
+
пCA+
τсл.
(11)
A
+
пCA+
τсл.
(11)
В свою чергу нормальне прискорення пCA буде
пCA =ω2г * lСА =2,252*0,8=4,05м/с2.
Значить, в рівнянні (11) недостає тільки модулів прискорень ас і аτCA.
Їх знаходять графічно (рис. 7).
Полігон Раап2с дає графічне рішення рівняння (11). Щоб визначити прискорення крапки В, роблять таким чином, як для швидкостей. Це значить, що коли поділити сегмент ас на дві рівні частини, можна одержати крапку b і сегмент Paв представлятиме абсолютне прискорення крапки В.
Прискорення крапки D знаходиться з допомогою наступних двох рівнянь:
![]()
![]() (12)
(12)
В свою чергу модулі нормальних прискорень anDB і anDE будуть рівні:
anDB =ω24 * lDB =9*9*0,4 = 32,4 м/с2,
anDE = ω25 *lDE=1*1 *0,3 = 0,3 м/с2.
Залишилось знайти модулі тангенціальних прискорень. їх знаходять графічним методом.
Використовуючи
рівняння (12) викреслюють полігон ![]() (рис. 7), який дає рішення рівнянь (12).
Використовуючи план прискорень, можна
знайти прискорення будь яких крапок
ланок механізму.
(рис. 7), який дає рішення рівнянь (12).
Використовуючи план прискорень, можна
знайти прискорення будь яких крапок
ланок механізму.
Для цього достатньо заміряти відповідний сегмент на епюрі і умножити на масштаб, так
![]()
де - масштаб прискорень, який буде
= аA /Рaа = 80/80 = 1 м*с2/мм.
Визначимо прискорення наступних крапок ланок механізму:
aC = (РаС) *µa= 31*1 = 31 м/с2, аB=(Раb)* µa = 50*1 = 50м/с2,
аD=(Раd) *µa = 9*1 = 9м/с2, аt CA = (n2С) * µa = 70*1 = 70м/с2,
аτDB = (п4d) * µa = 30* 1 = 30м/с2, аt DE = (п5d)* µa = 8,6*1=8,6м/с2.
Кутові прискорення ланок знаходяться з допомогою наступних формул:
ԑ2 = аτCA / lCA, = 70/0,8 = 87,6рад/с2,
ԑ4= аτDB / lDB =30/0,4 = 75рад/с2,
ԑ5 = аτDE / lDE = 8,6/03 = 28,67 рад/с2.
Для знаходження напрямків кутових прискорень переносять тангенціальні прискорення із епюри на схему механізму і відмічають напрямки кутових прискорень.
Порівняння одержаних результатів.
Для розрахунку швидкостей і прискорень використовують розглянуті дві методики. Якщо будують діаграми точно, одержують ті ж самі результати по двом розглянутим методикам. Точність результатів підраховують за наступними формулами:
![]()
![]()
де ∆V - похибка швидкості;
∆а - похибка прискорення;
Vп і V2 - величини швидкостей, визначених по епюрі (рис. 6) і по діаграмі (рис. 4в); ап і а2 - величини прискорень, визначених по епюрі (рис. 4с) і по діаграмі (рис. 7). Величини похибок ∆V і ∆а не повинні перевищувати 5 відсотків.
В цьому разі будемо мати:
для швидкостей
Vn= 3,9 м/с,
V2 =3,83 м/с.
Значить
∆V = (3,9 - 3,84) \ 3,9 • 100 = 1,5 %
для прискорень
ап = 31 м/с2,
а2 =30,66 м/с2.
Тоді
∆а = (31- 30.66)\31*100= 1.1 %.